Appearance
条件控制类
条件控制类
| 指令类型 | 前台 | 全局后台 | 局部后台 |
|---|---|---|---|
| 退出 | 支持 | 支持 | 支持 |
| 调用子程序 | 支持 | ||
| 调用Lua文件 | 支持 | 支持 | 支持 |
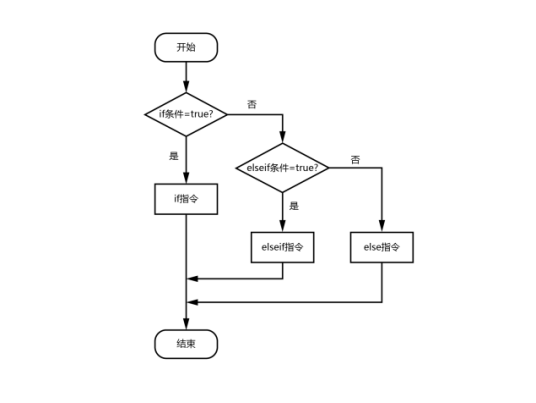
| 如果 | 支持 | 支持 | 支持 |
| 否则如果 | 支持 | 支持 | 支持 |
| 否则 | 支持 | 支持 | 支持 |
| 等待 | 支持 | 支持 | 支持 |
| 循环 | 支持 | 支持 | 支持 |
| 标签 | 支持 | 支持 | 支持 |
| 跳转 | 支持 | 支持 | 支持 |
| 直到 | 支持 | ||
| 工艺跳行 | 支持 | ||
| 指令注释 | 支持 | 支持 | 支持 |
| 是否可达判断 | 支持 | 支持 | 支持 |
| 计时开始 | 支持 | 支持 | 支持 |
| 计时结束 | 支持 | 支持 | 支持 |
| 计时复位 | 支持 | 支持 | 支持 |
| 读取线速度 | 支持 | ||
| 调用Lua语句 | 支持 | 支持 | 支持 |
| 参数声明 | 支持 | ||
| 等待运动到点 | 支持 | ||
| 碰撞检测设置 | 支持 | ||
| 碰撞检测参数复位 | 支持 | ||
| Switch | 支持 | 支持 | 支持 |
| Case | 支持 | 支持 | 支持 |
| Default | 支持 | 支持 | 支持 |
| 指令类型 | 指令 | 单步 | 倒序 | 试运行 | 提前执行 | 被提前执行 |
|---|---|---|---|---|---|---|
| 条件控制类 | 调用子程序 | 支持 | 跳转第一条 | 不支持 | 不支持 | 不支持 |
| 条件控制类 | 调用Lua文件 | 支持 | 跳转第一条 | 不支持 | 不支持 | 支持 |
| 条件控制类 | 如果 | 支持 | 跳转第一条 | 不支持 | 不支持 | 支持 |
| 条件控制类 | 否则如果 | 支持 | 跳转第一条 | 不支持 | 不支持 | 支持 |
| 条件控制类 | 否则 | 支持 | 跳转第一条 | 不支持 | 不支持 | 支持 |
| 条件控制类 | 等待 | 支持 | 跳转第一条 | 不支持 | 不支持 | 不支持 |
| 条件控制类 | 循环 | 支持 | 跳转第一条 | 不支持 | 不支持 | 支持 |
| 条件控制类 | 标签 | 支持 | 跳转第一条 | 不支持 | 不支持 | 支持 |
| 条件控制类 | 跳转 | 支持 | 跳转第一条 | 不支持 | 不支持 | 支持 |
| 条件控制类 | 直到 | 支持 | 跳转第一条 | 不支持 | 不支持 | 不支持 |
| 条件控制类 | 工艺跳行 | 支持 | 跳转第一条 | 不支持 | 不支持 | 支持 |
| 条件控制类 | 指令注释 | 支持 | 跳转第一条 | 不支持 | 不支持 | 支持 |
| 条件控制类 | 是否可达判断 | 支持 | 跳转第一条 | 不支持 | 不支持 | 支持 |
| 条件控制类 | 计时开始 | 支持 | 跳转第一条 | 不支持 | 不支持 | 支持 |
| 条件控制类 | 计时结束 | 支持 | 跳转第一条 | 不支持 | 不支持 | 支持 |
| 条件控制类 | 计时复位 | 支持 | 跳转第一条 | 不支持 | 不支持 | 支持 |
| 条件控制类 | 读取线速度 | 支持 | 跳转第一条 | 不支持 | 不支持 | 支持 |
| 条件控制类 | 调用Lua语句 | 支持 | 跳转第一条 | 不支持 | 不支持 | |
| 条件控制类 | 参数声明 | |||||
| 条件控制类 | 等待运动到点 | |||||
| 条件控制类 | 碰撞检测设置 | |||||
| 条件控制类 | 碰撞检测参数复位 | |||||
| 条件控制类 | Switch | |||||
| 条件控制类 | Case | |||||
| 条件控制类 | Default |
条件控制类参数说明
- 条件判断类指令有关与、或逻辑运算的说明。
| 与运算(&&) |
|---|
| 进行运算的两个数据,按二进制位进行"与"运算。 |
| 规则:0&&0=0; 0&&1=0; 1&&0=0; 1&&1=1; |
| 即: 两位同时为"1",结果才为"1",否则为0 |
| 例如:IF(I001=2)AND(GI001=1) |
| 当设置的两个判断条件都满足时才会执行if里面的指令。 |
| 或运算(||) |
|---|
| 进行运算的两个数据,按二进制位进行"或"运算。 |
| 运算规则:0||0=0; 0||1=1; 1||0=1; 1||1=1; |
| 即 :参加运算的两个对象只要有一个为1,其值为1。 |
| 例如:IF(I001=2)OR(GI001=1) |
| 当设置的两个判断条件只有一个满足时就会执行if里面的指令。 |
- 判断指令比较方式的说明
此处以IF指令作为示例介绍:
| 比较方式 | 说明 |
|---|---|
| == 等于 | 例如:IF(GI001=3) 变量GI001=3时才会执行IF与ENDIF之间的指令 |
| < 小于 | 例如:IF(D001<3) 变量D001<3时执行IF与ENDIF之间的指令 |
| > 大于 | 例如:IF(I001>11) 变量I001>11时执行IF与ENDIF之间的指令 |
| <= 小于等于 | 例如:IF(DOUT1-1<=10) DOUT1-1端口为低电平时就会执行IF与ENDIF之间的指令 |
| >= 大于等于 | 例如:IF(DIN1-1>=12) DIN1-1端口为高电平时执行IF与ENDIF之间的指令 |
| != 不等于 | 例如:IF(GS001!=AAA) GS001!=AAA时执行IF与ENDIF之间的指令 |
- 多组条件判断说明
IF,ELSEIF,WAIT,WHILE,JUMP,UNTIL指令支持多条件判断,最多支持5组判断。
此处以IF指令作为示例进行介绍:
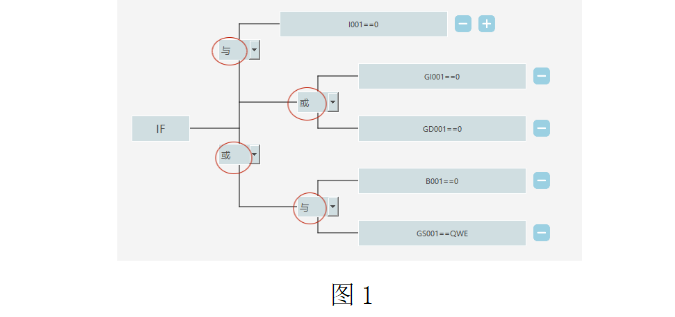
如图1设置5组判断条件:

判断逻辑:首先对{(GI001=0)OR(GD001=0)},{(B001=0)AND(GS001=QWE)}括号里的部分进行判断,然后{(GI001=0)OR(GD001=0)}的判断结果和(I001=0)进行与运算,最后将(I001=0)AND{(GI001=0)OR(GD001=0)}的判断结果和{(B001=0)AND(GS001=QWE)}的结果进行或运算,如果判断结果为真则执行IF与ENDIF之间的指令。
注意事项:判断顺序[有括号的优先判断括号内(从左往右判断),再与括号外的进行判断]。
CALL-调用子程序
格式:CALL【指令名称】[$子程序$]【调用程序文件名】IN(12)【传入参数】OUT(GI001)【传出参数】。
功能:调用另一个程序,被调用的程序运行完后返回主程序CALL指令的下一行继续运行。
如果需要使用输入和输出参数功能在被调用的子程序内需要有"PARAM_DECLARATION"(参数声明)这条指令才能读取到输入和输出的个数,"PARAM_DECLARATION"指令必须插在子程序首行。
参数:
CALL
- 选择子程序(被调用程序名称)
输入参数个数
- 从子程序参数声明指令设置的参数个数并显示到此处
- 此参数不可修改
输入参数选择
- 选择子程序后,输入参数为0时不可点击
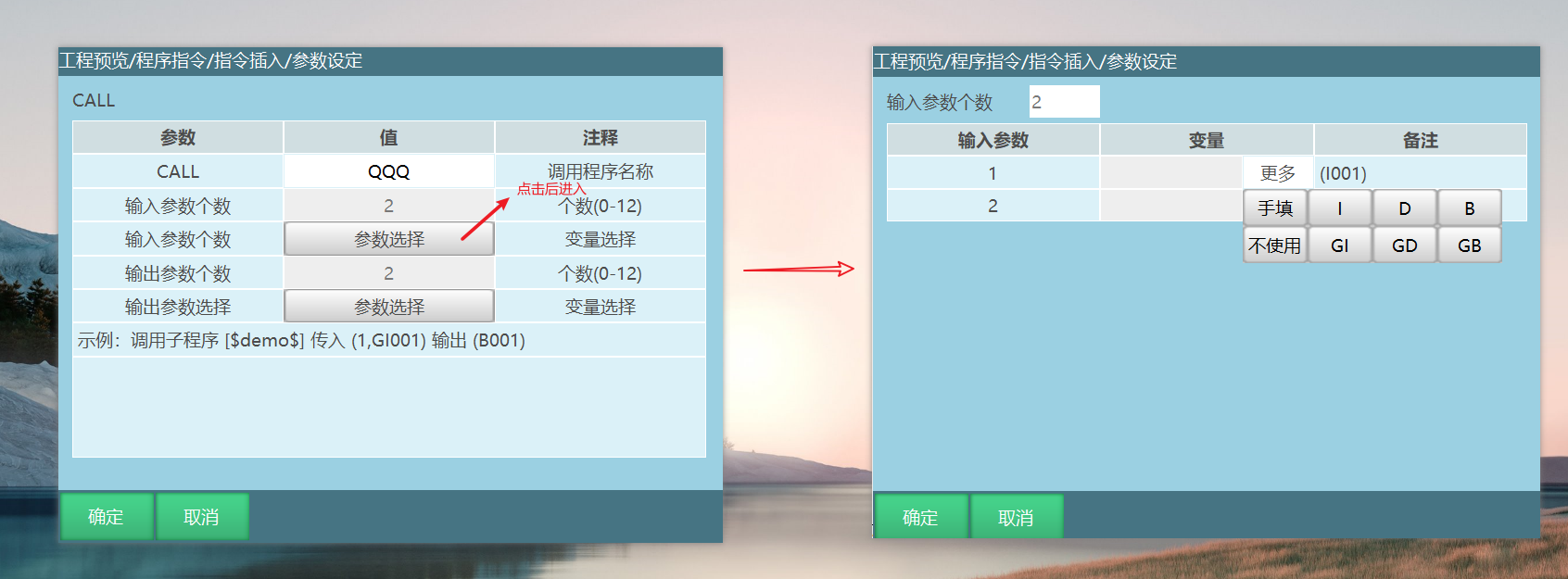
- 输入参数选择界面内:
输入参数个数
- 从子程序参数声明指令设置的参数个数并显示到此处
- 此参数不可修改
- 个数有几个下方表格会显示几行数据
输入参数列
- 显示参数顺序编号
备注列
- 备注显示的变量为PARAM_DECLARATION(参数声明)中的输入变量
值列
- 值类型可以为不使用、手填、变量;其中变量必须为可赋值到子程序对应变量的,例如子程序是I001,则只能选int、bool、double、手填值等类型,字符串类型不可赋值给I001。
- 当PARAM_DECLARATION中对应的输入参数的默认值为
- 手填或者变量时,输入参数值的【更多】选项可以选择不使用
- 为不使用时,输入参数值的【更多】选项不可以选不使用
注释列
显示内容为PARAM_DECLARATION中对应填入的注释文本+PARAM_DECLARATION中的对应变量
示例:AA(INT)
CALL指令中的输入值可以赋值给子程序中PARAM_DECLARATION(参数声明)中的输入参数绑定的变量。
输出参数个数
- 从子程序获取输出参数个数并显示到此处
- 此参数不可修改
输出参数选择
- 选择子程序后,输出参数为0时不可点击
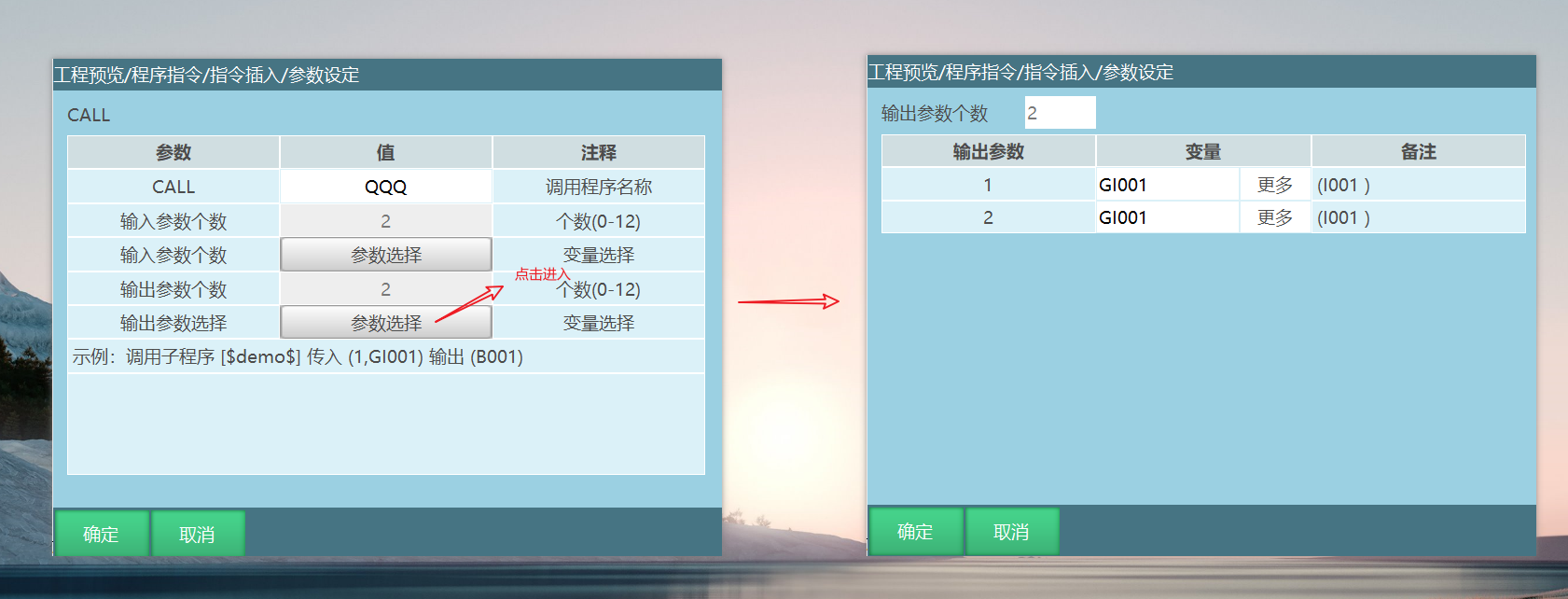
- 输出参数选择界面内
- 输出参数个数
- 从子程序获取输出参数个数并显示到此处
- 此参数不可修改
- 个数有几个下方表格会显示几行数据
- 输出参数列
- 显示参数顺序编号
- 值列
- 值类型可以为变量;其中变量必须为可赋值到子程序对应变量的,例如子程序是I001,则只能选int、bool、double等类型,字符串类型不可赋值给I001。
- 备注
- 备注显示参数为PARAM_DECLARATION(参数声明)中输出参数绑定的变量或者手填值
- 注释列
- 显示内容为PARAM_DECLARATION中对应填入的注释文本+PARAM_DECLARATION中的对应变量
- 示例:AA(INT)
- 输出参数个数
子程序中PARAM_DECLARATION(参数声明)的输出值可以赋值给CALL指令中的输出参数绑定的变量。
注意事项:主程序A调用程序B,程序B又调用程序A,会造成程序陷入死循环。
示例:主程序:
NOP
SET I001=12
SET I002=22
CALL[$Q11$]IN(I001,I002)OUT(D006,D007)
TIMER T=1
END
示例:子程序Q11:
NOP
PARAM_DECLARATION IN(D001=[-],D002=[-])OUT(10.0,11.0)
TIMER T=0.5
END
示例说明:主程序运行调用子程序指令,输入参数I001和I002的值被子程序接收使用,运行到子程序Q11时I001=12,I002=22,输出参数将返回给主程序使用,子程序运行结束后进入主程序D006=10,D007=11。
PARAM_DECLARATION-参数声明
格式:PARAM_DECLARATION【指令名 】IN(I001=1,[变量1])【输入参数信息】OUT(1,[输出参数])【输出参数信息】。
功能:声明要输入或者输出的参数,输入参数将被子程序接收并使用,输出参数将返回给主程序使用。
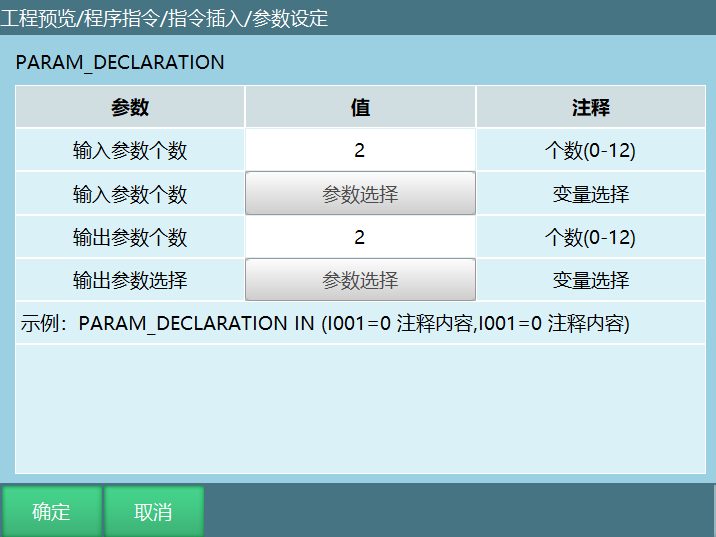
参数
输入参数个数
- 定义输入参数的个数,此处定义几个个数,在调用子程序指令参数界面输入参数的个数就是多少
输入参数选择
- 输入参数个数为0时可点击
- 参数选择界面内
- 输入参数个数
- 此参数可修改,定义要输入的参数个数
- 个数有几个下方表格会显示几行数据
- 变量列
- 选择输入参数要存入的变量
- 默认为I001
- 默认值列
- 选择参数的默认值,默认为不使用
- 此处更多类型有手填、不使用、变量
- 注释列
- 可以自定义注释内容
- 注释内容不能超过20个字符
- 示例:AA
- 输入参数个数
如果参数声明的输入参数变量值选择不使用,则从CALL指令输入参数中手填获取,如果参数声明的输入参数变量值选择手填,则CALL指令中的输入参数需要选择不使用。
输出参数个数
- 定义输出参数的个数,此处定义几个个数,在调用子程序指令参数界面输出参数的个数就是多少
输出参数选择
- 输出参数个数为0时可点击
- 参数选择界面内
- 输出参数个数
- 此参数可修改,定义要输出的参数个数
- 个数有几个下方表格会显示几行数据
- 输出参数列
- 显示参数顺序编号
- 值列
- 值类型可以为手填、变量;其中变量必须为可赋值到主程序对应变量的,例如CALL是I001,声明参数指令则只能选int、bool、double、手填值等类型,字符串类型不可赋值给I001。
- 注释列
- 可以自定义注释内容
- 注释内容不能超过20个字符
- 示例:AA
- 输出参数个数
PARAM_DECLARATION的输出参数值会返回给主程序中CALL指令的输出参数绑定的变量,需要注意的是变量必须为可赋值到主程序对应变量。
说明
参数定义,所有的前台程序均可以使用该指令定义
该指令必须插入到程序第一行,否则需报错
后台程序暂不添加,后期也需要增加此指令
注意
输入参数接收类型不可以为手填值,必须将输入参数接收到变量,输出参数可以为手填值
注意事项:
如果参数声明的输入参数变量值选择不使用,则从CALL指令输入参数中手填获取,如果参数声明的输入参数变量值选择手填,则CALL指令中的输入参数要选择不使用。
PARAM_DECLARATION的输出参数值会返回给主程序中CALL指令的输出参数绑定的变量,需要注意的是变量必须为可赋值到主程序对应变量。
示例:主程序
NOP
SET I001=12
SET I002=22
CALL[$Q11$]IN(I001,I002)OUT(D006,D007)
TIMER T=1
END
示例:子程序Q11
NOP
PARAM_DECLARATION IN(D001=[-],D002=[-])OUT(10.0,11.0)
TIMER T=0.5
END
执行完子程序后能监控到变量,GI009和GI010接收到了主程序的数值,GI001接收到了子程序返回的数值。
执行效果:子程序Q11参数声明的输入参数变量值选择不使用([-]表示:不使用),输入参数从从CALL指令输入参数中手填获取,主程序运行调用子程序指令,输入参数I001和I002的值被子程序接收使用,运行到子程序Q11时I001=12,I002=22,输出参数将返回给主程序使用,子程序运行结束后进入主程序D006=10,D007=11。
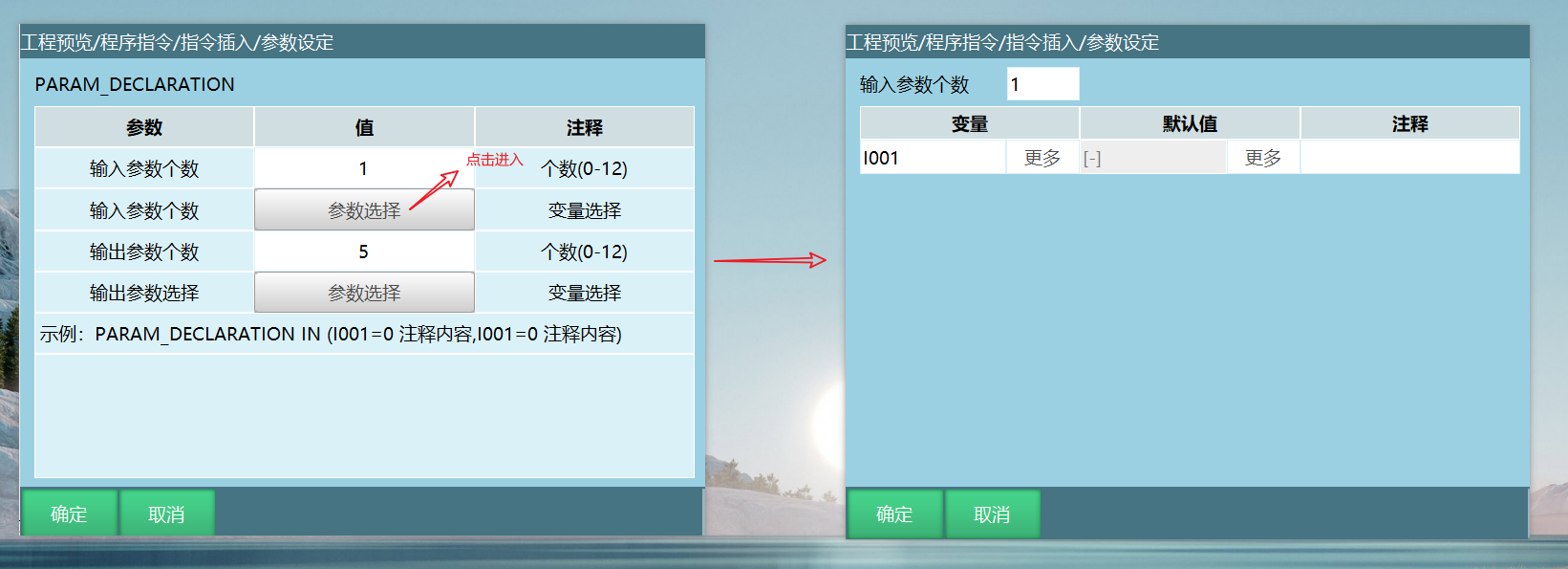
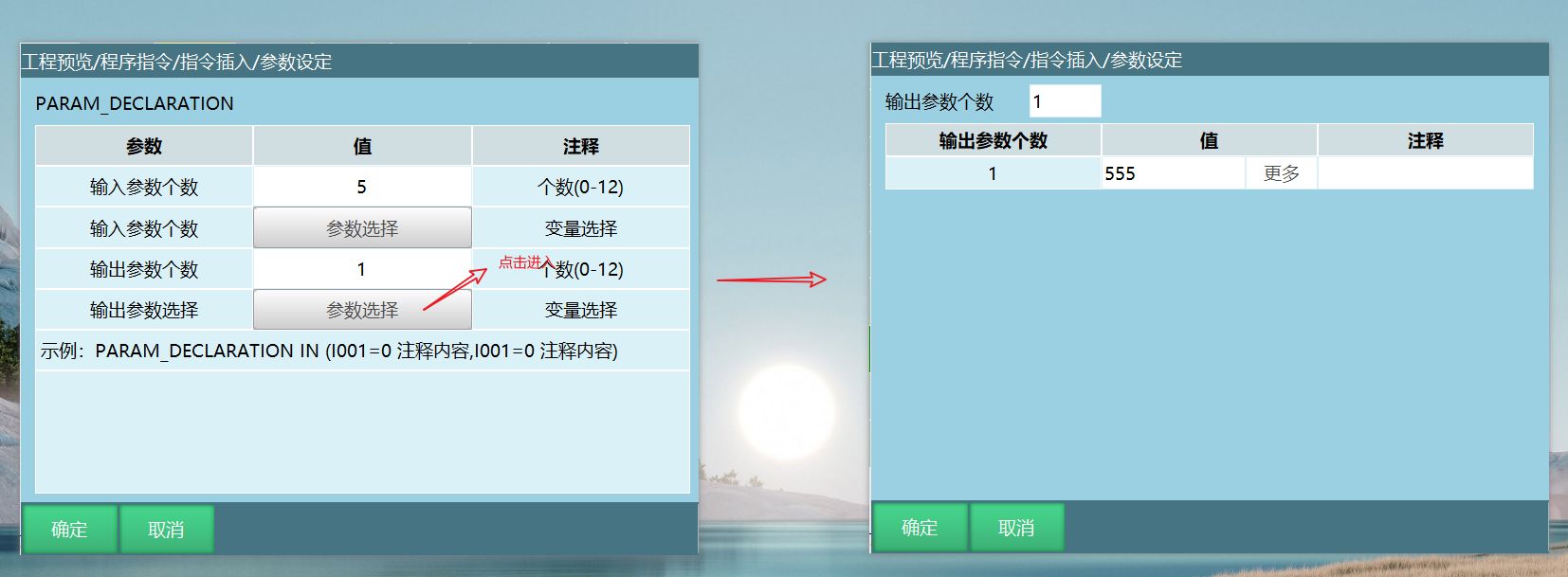
示例

主程序KKK选择子程序QQQ读取到2个输入参数和一个输出参数,在主程序设置输入参数222,333,设置输出参数GI001

子程序参数声明2个输入参数接收变量为GI009,GI010,值为不使用,从主程序接收,1个输出参数返回给主程序值为555

执行完子程序后能监控到变量,GI009和GI010接收到了主程序的数值,GI001接收到了子程序返回的数值。
RETURN-退出
格式:RETURN【指令名称】。
功能:为了更加快速的退出子程序,返回主程序中,该指令可用于子程序、主程序、复位程序、后台任务中的全局后台和局部后台中。相较于之前的子程序运行结束后,跳转到主程序界面,退出指令更快。
RETURN因为不需要进行指令参数的填写,所以此类型的指令,点击插入指令时不会再跳转到指令参数界面,点击插入指令直接在作业文件中添加指令。由于此类指令没有指令参数界面,所以当光标位于指令上时,修改控件处于置灰状态。
退出线程指令与退出指令的区别:退出线程指令是由主程序将线程关闭,退出指令则是由线程内部自主关闭线程。如果在主程序中执行退出指令,等同于停止运行指令的效果。
使用示例
- 用于主程序中。

程序运行到退出指令,程序停止,伺服由运行状态变为就绪状态,程序停止运行,位于退出指令后的指令不再运行。复位程序效果和主程序效果一致。
- 用于子程序


主程序调用子程序,当子程序中运行到退出指令,会从子程序跳转到主程序,继续运行。
- 用于后台任务。



主程序调用全局后台和局部后台,当全局后台和局部后台运行到退出指令时,退出全局和局部线程。
CALL_LUAFILE-调用LUA文件
格式:CALL_LUAFILE【指令名称】[$name$]【上传的Lua文件名称】IN[1001,I002]【传入参数个数】OUT[G1001,GI002]【传出参数个数】。
功能:参数定义好之后,直接上传Lua文件,然后插入调用Lua文件指令,指令运行结束后会把写好的所有参数变量传入和输出。
参数:
| 参数 | 说明 |
|---|---|
| CALL_LUAFILE | 选择调用上传的Lua文件 |
| 传入参数个数 | Lua文件传入参数数量 |
| 传入参数选择 | 选择所需传入参数的个数和传入参数的变量类型 |
| 输出参数个数 | Lua文件输出参数数量 |
| 输出参数选择 | 选择所需输出参数的个数和变量类型 |
注意事项:
传入的参数个数要和调用的Lua文件里面个数相同
输出参数的个数可以少于调用的Lua文件里面个数
传入参数和输出参数的类型变量类型最好统一,否则在执行CALL_LUAFILE-调用LUA文件指令时报错(调用Lua脚本出参错误)
以下调用的名为[demo.lua]文件定义了5个参数(I002、GI002、GD002、GP0001、GE0005):
nex.I[2]=200 --将全局数值变量 I002 修改为200
nex.GI[2]=100--将全局数值变量 GI002 修改为100
nex.GD[2]=11.22 --将全局数值变量 GD002 修改为11.22
GP1 = nex.GP[1]
GP1.coord, GP1.unit, GP1.configuration, GP1.tool, GP1.user = 0,2,4,6,1
pos1=GP1:pos()
pos1.x,pos1.y,pos1.z,pos1.a,pos1.b,pos1.c = 1,2,3,4,5,6
nex.GP[1]=GP1
GE5 = nex.GE[5]
GE5.coord, GE5.unit, GE5.configuration, GE5.tool, GE5.user = 2,1,3,4,5
pos1=GE5:pos()
pos1.x,pos1.y,pos1.z,pos1.a,pos1.b,pos1.c,GE5.E1,GE5.E2 = 1,2,3,4,5,6,7,8
nex.GE[5]=GE5
n1,n2,n3,GP1,GE5 = nex.get_param() --获取从作业文件中传递过来的参数
nex.set_param(n1,n2,n3,GP1,GE5) --将参数传递回作业文件
示例:插入调用Lua文件指令
NOP
CALL_LUAFILE[demo.lua]IN(GI002,I002,GD002,GP0001,GE0005)OUT(I003,GI003,GD003,GP0002,GE0001)
TIMER T=5
END
示例说明:运行调用Lua文件指令I002=200,GI002=100,GD002=11.22,GP0001(1,2,3,4,5,6)GE0005(1,2,3,4,5,6,7,8)。
I003=100,GI003=200,GD003=11.22,GP0002(1,2,3,4,5,6)GE0001(1,2,3,4,5,6,7,8)。
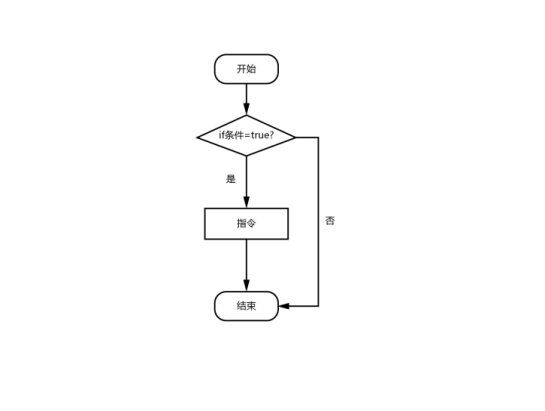
IF-如果
格式:IF 【指令名】I001【参数1】=【比较方式】D001【参数2】。
功能:通过判断条件是否成立来执行下一目标的指令。
参数:
| 参数 | 说明 |
|---|---|
| 变量1 | 变量1的类型,可以选择数值变量、数字输入输出、模拟输入变量,位置变量类型 1. 若参数类型选择的类型为数值变量(INT、DOUBLE、BOOL、GINT、GDOUBLE、GBOOL),则此处为变量1的变量名 2. 若参数类型选择的类型为数字/模拟变量(DIN、DOUT、AIN),则此处为数字输入输出或模拟输入的端口号 3. 若参数类型选择的类型为位置变量(P、GP、E、GE),选择位置变量后变量的格式为选择的位置变量加位置变量坐标轴,当选择变量坐标轴的点位满足条件时执行if里面的指令 |
| 比较方式 | == 等于 <小于 >大于 <= 小于或等于 >= 大于或等于 != 不等于 |
| 变量2 | 参数2选择的变量类型:手填,变量 若变量值来源选择手填,则在此处直接填写参数2的值 |
注意事项:
IF指令可以单独使用,也可搭配ELSEIF、ELSE两条指令使用。注意:ELSEIF、ELSE指令不可脱离IF指令单独使用。
当程序的开头为IF且最后一行为ENDIF指令时,请在IF指令上方或ENDIF下方插入一条0.1秒的TIMER(延时)指令,否则当IF指令的条件不满足时会导致程序陷入死机状态。
插入IF指令时会同时插入ENDIF指令,当删除IF指令时请注意将对应的ENDIF指令也删掉,否则会导致程序无法执行。
示例:
NOP
MOVL P0001 V=10mm/s PL=0 ACC=1 DEC=1 0
IF (GI001>5)AND
TIMER T=2
ENDIF
END
示例说明:程序运行到第3行时,对IF指令进行判断,判断为真执行延时指令,反之程序直接运行到第6行。
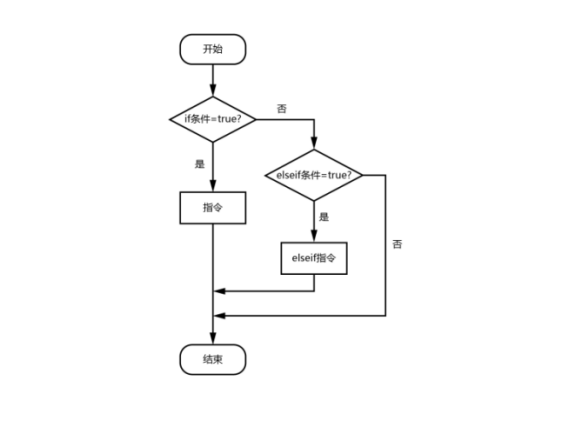
ELSEIF-否则如果
格式:IF 【指令名】I001【参数1】=【比较方式】D001【参数2】。
功能:IF指令的判断条件不满足时,执行ELSEIF语句。
参数:
| 参数 | 说明 |
|---|---|
| 变量1 | 变量1的类型,可以选择数值变量、数字输入输出、模拟输入、位置变量类型 1. 若参数类型选择的类型为数值变量(INT、DOUBLE、BOOL、GINT、GDOUBLE、GBOOL),则此处为变量1的变量名 2. 若参数类型选择的类型为数字/模拟变量(DIN、DOUT、AIN),则此处为数字输入输出或模拟输入的端口号 3. 若参数类型选择的类型为位置变量(P、GP、E、GE),选择位置变量后变量的格式为选择的位置变量加位置变量坐标轴,当选择变量坐标轴的点位满足条件时执行elseif里面的指令 |
| 比较方式 | == 等于 <小于 >大于 <= 小于或等于 >= 大于或等于 != 不等于 |
| 变量2 | 变量2选择的变量类型 参数2支持自定义,若变量值来源处选择手填,则在此处直接填写参数2的值 |
注意事项:
当IF的条件满足时,会执行IF语句里面的指令,会忽略掉ELSEIF与ENDIF之间的指令。
当IF的条件不满足时,会跳转到ELSEIF指令,判断ELSEIF的判断条件,若条件成立,则运行ELSEIF和ENDIF之间的指令,然后继续运行ENDIF下面的指令;若不满足,则直接跳转到ENDIF下面的一行指令继续运行。
若在IF与ENDIF中嵌套了多条ELSEIF,当IF的判断条件不成立时首先判断第一条ELSEIF的判断条件,若成立则运行第一条ELSEIF与第二条ELSEIF之间的指令;若不成立则判断第二条ELSEIF的判断条件,以此类推。
当删除IF指令时,需删除与其对应的ELSEIF和ENDIF指令,否则会导致程序报错无法运行。
示例:
NOP
MOVL P0001 V=10mm/s PL=0 ACC=1 DEC=1 0
IF(I001=5)
TIMER T=1
ELSEIF(I001!=0)AND(GI001=2)
TIMER T=2
ENDIF
END
示例说明:运行到第三条指令时,对IF指令判断,判断为真执行第4条延时指令,反之则判断ELSEIF语句,如果ELSEIF条件成立,则执行第6条延时指令,反之程序直接运行到第8行。
ELSE-否则
格式:ELSE【指令名】。
功能:IF,ELSEIF指令的判断条件都不成立时,执行ELSE语句。
参数:略。
注意事项:
ELSE指令必须插入在IF和ENDIF之间,但是一个IF指令只能嵌入一条ELSE指令。
当IF的判断条件成立时,会运行IF与ELSE之间的指令运行结束后跳转到ENDIF的下一行指令继续运行。
当IF的判断条件不成立时,会跳转到ELSE与ENDIF之间的指令运行。
当删除IF指令时,需删除与其对应的ELSE和ENDIF指令,否则会导致程序无法运行。
示例:
NOP
ADD D001 1
IF (I001<10)
TIMER T=1
ELSEIF (GI001!=5)
MOVL P0001 V=10mm/s PL=0 ACC=1 DEC=1 0
ELSE
TIMER T=1
ENDIF
END
示例说明:当IF指令和ELSEIF指令的判断条件都不成立时,判断ELSE指令,若ELSE判断成立,执行第8行指令,反之直接运行到第10行。
WAIT-等待
格式:WAIT【指令名称】GI001【参数1】==【比较方式】2【参数2】T = 2 【等待时间】F = 1【滤波时间】Return=B001【等待结果存入变量】。
功能:条件成立之前程序处于等待状态,条件成立后继续执行等待指令后面的指令。
说明:WAIT即等待,可以选择是否有等待时间。当没有勾选"TIME"选项,则在判断条件不成立时一直停留在该WAIT指令等待,直到判断条件成立。若勾选了"TIME"选项,则会在等待该参数的时长后不再等,继续运行下一条指令。若在等待时条件变为成立,则立刻运行下一条指令。
现在WAIT支持多条件判断按顺序判断,有括号的优先判断括号内的再于括号外的进行判断,最多支持5个判断条件。
参数:
| 参数 | 说明 |
|---|---|
| 参数1 | 参数1的类型,可以选择数值变量、数字输入输出、模拟输入、位置变量类型 1. 若参数类型选择的类型为数值变量(INT、DOUBLE、BOOL、GINT、GDOUBLE、GBOOL),则此处为参数1的变量名 2. 若参数类型选择的类型为数字/模拟变量(DIN、DOUT、AIN),则此处为数字输入输出或模拟输入的端口号 3. 若参数类型选择的类型为位置变量(P、GP、E、GE),选择位置变量后变量的格式为选择的位置变量加位置变量坐标轴,当选择变量坐标轴的点位满足条件时执行wait里面的指令 |
| 比较方式 | == 等于 <小于 >大于 <= 小于或等于 >= 大于或等于 != 不等于 |
| 参数2 | 参数2选择的变量类型 参数2支持自定义,若变量值来源处选择的为自定义,则在此处直接填写参数2的值 |
| Time等待时间 | 1. 不勾选"TIME"选项,则在判断条件不成立时一直停留在该WAIT指令等待,直到判断条件成立 2. 勾选了"TIME"选项,到达等待时间不论条件是否成立也会运行下一条指令。若在等待指令时条件变为成立,则立刻运行下一条令 |
| 滤波时间 | 1. 输入信号时间满足滤波时间:(无需等待TIME)直接到下一行继续行 2. 不满足滤波时间时:则到达等待TIME时间之后到下一行继续运行 |
| 等待结果 | 将等待结果存入布尔变量,超出等待时间等待结果返回1,未超出等待时间,等待结果返回0 |
示例:
NOP
MOVL P0001 V=10mm/s PL=0 ACC=1 DEC=1 0
WAIT (GI001<5) T=1 Return=GB001
MOVL P0001 V=10mm/s PL=0 ACC=1 DEC=1 0
END
示例说明:程序在运行到第3行等待指令判断条件是否成立,若成立直接运行等待下面的指令;若不成立,则到达等待时间后运行等待下面的指令,将等待结果存入变量GB001。
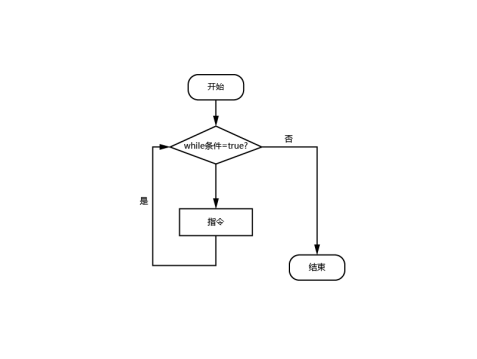
WHILE-循环
格式:WHILE 【指令名】I001【参数1】=【比较方式】D001【参数2】。
功能:判断条件为真是反复执行循环语句里面的指令。
参数:
| 参数 | 说明 |
|---|---|
| 参数1 | 参数1的类型,可以选择数值变量、数字输入输出、模拟输入、位置变量类型 1. 若参数类型选择的类型为数值变量(INT、DOUBLE、BOOL、GINT、GDOUBLE、GBOOL),则此处为参数1的变量名 2. 若参数类型选择的类型为数字/模拟变量(DIN、DOUT、AIN),则此处为数字输入输出或模拟输入的端口号 3. 若参数类型选择的类型为位置变量(P、GP、E、GE),选择位置变量后变量的格式为选择的位置变量加位置变量坐标轴,当选择变量坐标轴的点位满足条件时执行while里面的指令 |
| 比较方式 | == 等于 <小于 >大于 <= 小于或等于 >= 大于或等于 != 不等于 |
| 参数2 | 参数2选择的变量类型,支持自定义,若变量值来源处选择的为自定义,则在此处直接填写参数2的值 |
注意事项:
插入WHILE指令的同时会同时插入ENDWHILE指令。若要删除WHILE指令请同时删掉其对应的ENDWHILE指令,否则会导致程序无法运行。
当程序的开头为WHILE且最后一样指令为ENDWHILE时,请在程序的开头或结尾插入一条TIMER(延时)指令。否则当WHILE指令的条件不满足时会导致程序陷入死机。
当WHILE内部的指令没有运动类指令或在某种情况下可能会陷入死循环时,请在WHILE与ENDWHILE间插入一条TIMER(延时)指令,否则当WHILE指令的条件满足时可能会导致程序陷入死机。
当WHILE指令的条件满足时,会循环运行WHILE与ENDWHILE两条指令之间的指令。在运行到WHILE指令之前若判断条件不满足,在运行到WHILE指令时会直接跳转到ENDWHILE指令而不运行WHILE与ENDWHILE之间的指令;若在运行WHILE与ENDWHILE之间的指令过程中,判断条件变成不满足,会继续运行,直到运行到ENDWHILE行,不再循环而是继续运行ENDWHILE下面的指令。
示例:
NOP
CALL[$Z子程序$]
WHILE(DIN1-1=1)OR(GI001=1)
MOVL P0001 V=10mm/s PL=0 ACC=1 DEC=1 0
MOVL P0002 V=10mm/s PL=0 ACC=1 DEC=1 0
ENDWHILE
TIMER T=1
END
示例说明:程序在运行到WHILE指令之前先判断循环条件是否满足,若满足则循环运行WHILE与ENDWHILE两条指令之间的运动指令,若不满足则执行循环语句外的指令。
LABEL-标签
格式:LABEL【指令名】[$name$]【标签名】。
功能:指定跳转目标行的标签。
参数:
| 参数 | 说明 |
|---|---|
| 标签名 | 指令跳转的标签名,例如标签名是【Q1】,在跳转指令参数设定界面选择的标签名是【Q1】,那程序会一直运行标签和跳转指令之间的指令 |
注意事项:
同一程序无法插入两条标签名相同的标签指令。
标签指令不支持上移、下移操作。
示例:
NOP
MOVL P0001 V=10mm/s PL=0 ACC=1 DEC=1 0
LABEL [$Q1$]
MOVL P0002 V=10mm/s PL=0 ACC=1 DEC=1 0
MOVL P0003 V=10mm/s PL=0 ACC=1 DEC=1 0
JUMP [$Q1$]
TIMER T=1
END
示例说明:一直循环运行LABEL [$Q1$]和JUMP [$Q1$]两条指令之间的指令。
JUMP-跳转
格式:JUMP【指令名】[$TIP$]【标签名】WHEN(I001=0)【判断条件】。
功能:跳转至指定标签号的指令行。
参数:
| 参数 | 说明 |
|---|---|
| 标签名 | 选择已插入LABEL指令的标签名 |
| 判断条件 | 1. 有判断条件:判断条件成立则跳转到LABEL指令行,若判断条件不成立则忽略JUMP指令,继续运行JUMP指令的下一行指令 2. 无判断条件:运行到该指令会直接跳转到对应的LABEL指令后继续运行LABEL指令的下一行指令 |
| 参数类型 | 可以选择数值变量、数字输入输出、模拟输入变量类型 若参数类型选择的类型为变量(INT、DOUBLE、BOOL、GINT、GDOUBLE、GBOOL),则此处为参数1的变量名 若参数类型选择的类型为输入值(DIN、DOUT、AIN),则此处为数字输入输出或模拟输入的端口号 |
| 比较方式 | == 等于 <小于 >大于 <= 小于或等于 >= 大于或等于 != 不等于 |
| 变量值来源 | 支持自定义和变量类型,若变量值来源选择自定义,则在此处直接填写给变量赋值的数值 |
注意事项:
JUMP指令必须与LABEL(标签)指令配合使用。
JUMP指令不可跨程序跳转。例如主程序里面插入LABEL [$Q1$]指令,在子程序插入JUMP [$Q1$]指令,程序运行会报错。
示例:
NOP
MOVL P0001 V=10mm/s PL=0 ACC=1 DEC=1 0
LABEL [$Q1$]
MOVL P0002 V=10mm/s PL=0 ACC=1 DEC=1 0
MOVL P0003 V=10mm/s PL=0 ACC=1 DEC=1 0
JUMP [$Q1$] WHEN(GI001!=10)AND(GI002>5)
TIMER T=1
END
示例说明:跳转指令设置了条件判断,当判断条件成立时会跳转到标签行重复运行LABEL和JUMP 之间的直线指令,若不成立则继续运行JUMP指令的下一行TIMER(延时)指令。
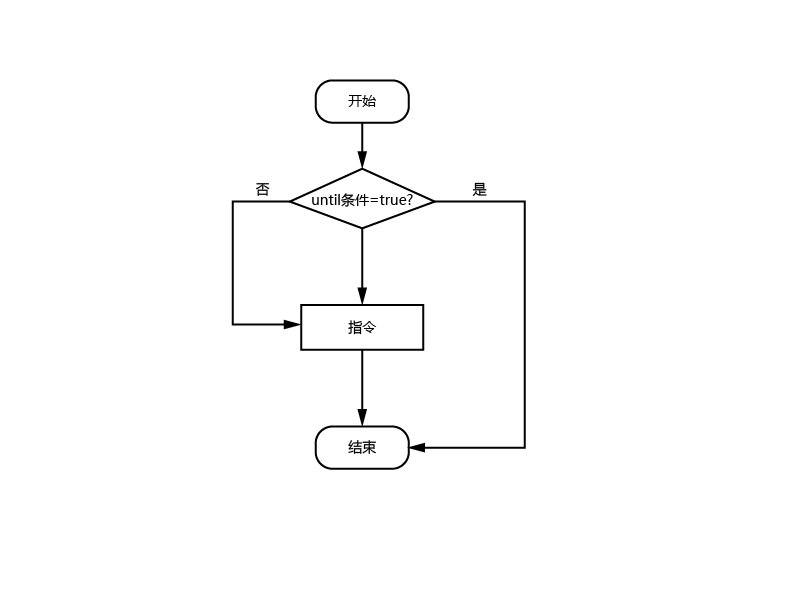
UNTIL-直到
格式:UNTIL【指令名】I001【变量1】=【比较方式】I002【变量2】。
功能:条件不成立时重复执行UNTIL和ENDUNTIL之间的指令,条件成立时直接跳到ENDUNTIL下面的指令运行。
参数:
| 参数 | 说明 |
|---|---|
| 参数类型 | 可以选择数值变量、数字输入输出、模拟输入变量类型 若参数类型选择的类型为变量(INT、DOUBLE、BOOL、GINT、GDOUBLE、GBOOL),则此处为参数1的变量名 若参数类型选择的类型为输入值(DIN、DOUT、AIN),则此处为数字输入输出或模拟输入的端口号 |
| 比较方式 | == 等于 <小于 >大于 <= 小于或等于 >= 大于或等于 != 不等于 |
| 变量值来源 | 支持自定义和变量类型,若变量值来源选择自定义,则在此处直接填写给变量赋值的数值 |
注意事项:
- UNTIL指令插入的同时会插入ENDUNTIL指令。若要删除UNTIL指令请同时删掉其对应的ENDUNTIL指令,否则会导致程序无法运行。
示例:
NOP
MOVL P0001 V=10mm/s PL=0 ACC=1 DEC=1 0
UNTIL(I001<5)
MOVL P0002 V=10mm/s PL=0 ACC=1 DEC=1 0
MOVL P0003 V=10mm/s PL=0 ACC=1 DEC=1 0
ENDUNTIL
TIMER T=1
END
示例说明:当UNTIL条件成立时,会直接跳转到ENDUNTIL后面的TIMER(延时)指令,当UNTIL条件不成立时,会执行UNTIL和ENDUNTIL之间的直线指令。
CRAFTLINE-工艺跳行
格式:CRAFTLINE【指令名】1【对应行数】。
功能:只用于专用工艺,程序中插入该指令设置对应行数,在专用工艺界面运行程序时会先跳转到对应的行数。
参数:
| 参数 | 说明 |
|---|---|
| 新参数 | 此处填写的数字表示在运行专用工艺程序时,会跳行对应行数 |
示例:

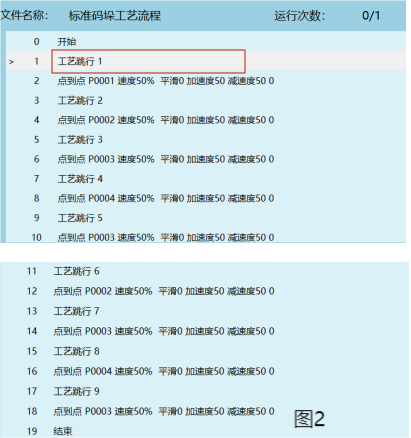
示例说明:图2程序中工艺跳行1这条指令对应图1专用工艺序号1这条指令,如果将图2图中红色勾选部分改为工艺跳行5,在专用工艺界面运行程序会首先跳行到图1界面序号5这一条指令,然后从辅助点开始运行程序。
CMDNOTE-注释指令
格式:##注释内容$$。
功能:程序适当位置添加注释,便于调试。
参数:略。
注意事项:
注释指令在运行时会跳到下一行指令运行,不会有报错提示。
注释的内容支持中英文,支持大小写,支持数字输入和支持符号输入。
示例:
NOP
##运行直线轨迹$$
MOVL P0002 V=10mm/s PL=0 ACC=1 DEC=1 0
MOVL P0002 V=10mm/s PL=0 ACC=1 DEC=1 0
##延时1秒$$
TIMER T=1
END
示例说明:第2行插入的注释指令是对第3、4行指令的注释,第5行插入的注释指令是对第6行指令的注释。
POS_REACHABLE-是否可达判断
格式:POS_REACHABLE【指令名】MOVL/MOVJ【运动类型】B001【状态存入的变量】。
功能:判断目标点是否能到达,点位能够到达选择的状态存入的变量置1,不能到达置0。
参数:
| 参数 | 说明 |
|---|---|
| 位置变量名 | 全局位置点位(GP),局部位置点位(P) |
| 运动类型 | 直线插补(MOVL),关节插补(MOVJ) 例如:有的点位通过关节插补的运动方式可以到达,直线插补的方式无法到达。通过插入是否可达判断指令来判断运行的目标点位通过直线插补、关节插补是否可以达到,防止机器人在运行过程中到达奇异点导致飞车 |
| 状态存入的变量 | 将点位能否到达的判定结果存入变量。"1"表示可以到达,"0"表示无法到达 |
示例:
NOP
POS_REACHABLE MOVL GP0001 GB0001
POS_REACHABLE MOVL GP0002 GB0002
MOVJ GP0001 V=10mm/s PL=0 ACC=1 DEC=1 0
MOVJ GP0002 V=10mm/s PL=0 ACC=1 DEC=1 0
END
示例说明:首先插入是否可达判断指令来判断目标点位GP0001、GP0002通过直线插补的方式能否到达,如果能到达的话变量GB001、GB0002置为1。
CLKSTART-计时开始
格式:CLKSTART【指令名】ID=1【计时序号】D001【计时存入的变量】。
功能:运行该指令开始计时,并将时间记录到局部或者全局DOUBLE变量。
参数:
| 参数 | 说明 |
|---|---|
| 序号 | 计时器的序号,可以同时使用32个计时器分别计时 |
| 存入变量 | 变量类型可以选择局部DOUBLE变量或者全局的GDOUBLE变量,记录的时间会存入到选择的变量 例如:选择的变量是GD001,在程序运行的时候GD001会存入计时的时间 |
示例:
NOP
MOVL GP0001 V=10mm/s PL=0 ACC=1 DEC=1 0
CLKSTART ID=1 GD001
MOVL GP0002 V=10mm/s PL=0 ACC=1 DEC=1 0
END
示例说明:程序在运行到第3行指令时计时1开始计时,第4行指令运行结束后计时器1计时结束,记录的时间存入到变量GD001。
CLKSTOP-计时停止
格式:CLKSTOP 【指令名】ID=1【停止计时的计时器序号】。
功能:停止对应序号的计时器计时,停止后已存入变量的值不会归零。
参数:
| 参数 | 说明 |
|---|---|
| 序号 | 停止计时器计时的序号,计时开始和计时停止的计时器序号需要对应 |
示例:
NOP
CLKSTART ID=1 GD001
MOVL GP0001 V=10mm/s PL=0 ACC=1 DEC=1 0
MOVL GP0002 V=10mm/s PL=0 ACC=1 DEC=1 0
CLKSTOP ID=1
MOVL GP0003 V=10mm/s PL=0 ACC=1 DEC=1 0
END
示例说明:程序运行到第2行时计时器1开始计时,运行到第5行时计时器1计时停止计时,停止后已存入变量的时间不会清零,如果在同一程序计时器1重新开始计时,会从上次停止的数值开始计时(例如:上次计时停止时间是12.55ms,重新开始计时会从12.55ms开始计时)。
CLKRESET-计时复位
格式:格式:CLKSTOP 【指令名】ID=1【停止计时的计时器序号】。
功能:将对应序号的计时器清零。若没有使用该指令,下次运行CLKSTART指令会累积计时。
参数:
| 参数 | 说明 |
|---|---|
| 序号 | 计时器复位的序号,计时开始和计时复位的计时器序号需要对应 |
示例:
NOP
CLKSTART ID=1 GD001
MOVL GP0001 V=10mm/s PL=0 ACC=1 DEC=1 0
MOVL GP0002 V=10mm/s PL=0 ACC=1 DEC=1 0
CLKSTOP ID=1
MOVL GP0003 V=10mm/s PL=0 ACC=1 DEC=1 0
CLKPESET ID=1
END
示例说明:程序在运行到第2行时计时器1开始计时,计时的值存入变量GD001,运行到第5行时计时器1停止计时,但是变量GD001的值不会清零,运行到第7行时,计时器1复位变量GD001的值清零。
READLINEAR-读取线速度
格式:READLINEAR【指令名】GI001【存入数值的变量】。
功能:机器人运行的时候实时读取机器人线速度,将读取到的速度存入到变量。
参数:
| 参数 | 说明 |
|---|---|
| 变量 | 选择的变量类型(INT、GINT,DOUBLE、GDOUBLE) |
注意事项:
- 插入读取线速度指令时会同时插入读取线速度停止,如果要删除读取线速度指令请将对应线速度停止指令删除,否则程序会报错。
示例:
NOP
MOVL GP0001 V=10mm/s PL=0 ACC=1 DEC=1 0
READLINEAR GI001
MOVL GP0002 V=10mm/s PL=0 ACC=1 DEC=1 0
ENDREADLINEAR
MOVL GP0003 V=10mm/s PL=0 ACC=1 DEC=1 0
END
示例说明:程序在运行到第2行时开始读取线速度,并将读取到的值存入到变量GI001(GI001的数值是实时变化的),在运行到第5行指令时,停止读取线速度(GI001的数值回到初始状态)。
CALL_LUASTRING-调用Lua语句
格式:CALL_LUASTRING【指令名】[$语句$]【输入的Lua】。
功能:通过调用Lua语句来实现相应的功能或操作。例如:变量的修改,全局、局部点位的获取。
参数:
| 参数 | 说明 |
|---|---|
| 语句 | 手填:输入正确的Lua语句可以直接单步或运行 例如:修改GI001=12 CALL_LUASTRING #nex.GI[1]=12# 变量:把Lua语句写到字符串(string)变量中,通过调用相应的字符串变量来实现其功能 例如:修改GI002=22 SET GS001=#nex.GI[2]=22# CALL_LUASTRING GS001 |
示例:
NOP
SET GS005=#nex.GI[5]=12#
CALL_LUASTRING GS005
CALL_LUASTRING #nex.dout[1,1]#
END
示例说明:通过调用lua语句指令,输入正确的lua语句格式,修改GI005=12,IO板1数字输出端口1-1口置为高电平。
WAIT_POS-等待运动到点
格式:WAIT_POS【指令名】SPEED/POS【速度/位置】ACCURARY【精度】MINTIME【最小等待时间】MAXTIME【最大等待时间】
功能:MOV指令执行结束并不代表伺服运行结束,仅为点位下发结束,此指令等待伺服电机运行精准到点,再执行下一个指令
参数:
| 参数 | 说明 |
|---|---|
| 位置/速度 | 等到运动到点的参数 |
| 精度 | 判断是否到点的参考 例:数值为0.1,只要点位下发完成等待【设定的时间】开始判断是否到点 |
| 最小等待时间 | 不管有没有运动到指定点位,这个时间都要等待 |
| 最大等待时间 | 如果等待时间超过了此时间,机器人还没有运动到点的话,就会报错 |
注意:
- 此指令对所有的运动指令有效,必须在运动指令后执行此指令才生效
- 此指令只能仅支持前台程序,后台无运动指令自然也不需要使用
- 此指令不支持提前执行
- 如果机器人在 最小等待时间和最大等待时间 之间,运动到点了,就会退出等待,执行下一条指令
WAIT_POS使用示例
NOP
MOVJ P0001 VJ = 10 % PL = 0 ACC = 10 DEC = 10 0
WAIT_POS
DOUT OT#(1) 0 T = 0 0
MOVJ P0002 VJ = 10 % PL = 0 ACC = 10 DEC = 10 0
END
轴速度
观察运动指令运行结束,轴速度全部归零(等待运动到点指令生效)
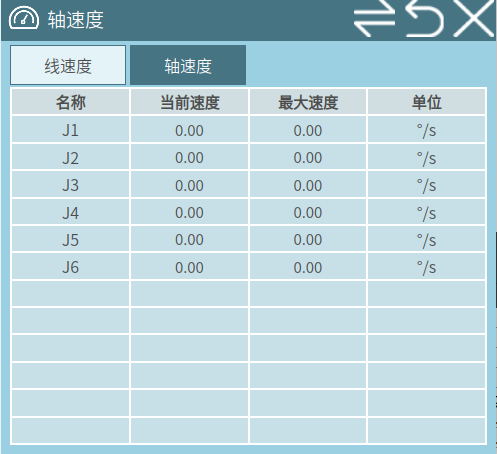
示例说明:当第4行指令运行结束后,表示点位的运行结束,第5行指令运行结束表示伺服运行结束,伺服运动到点后开始执行延时指令。
DETECTCOLLISION_SET_碰撞检测设置
格式:DETECTCOLLISION_SET【指令名】0/1【临时参数关/临时参数开】0/1【0"碰撞检测使能关",1"碰撞检测使能开"】JI=50、J2=50、J3=50、J4=50、J5=50、J6=50【碰撞检测阈值】。
功能:调用临时参数,方便及时调整碰撞检测阈值。
参数:
使用临时参数:打开此开关后才可以修改碰撞检测参数阈值。
碰撞检测使能:开启后机器人会根据灵敏度对碰撞进行检测,通常需要找到机器人运行时不会判定发生碰撞的值,然后就可以正常使用。
示例:
NOP
MOVL P0001 V=10mm/s PL=0 ACC=1 DEC=1 0
MOVL P0002 V=10mm/s PL=0 ACC=1 DEC=1 0
DETECTCOLLISION_SET 1 1 55 55 55 55 55 55
MOVL P0003 V=10mm/s PL=0 ACC=1 DEC=1 0
END
示例说明:执行第2,3条指令时调用的碰撞检测参数阈值为人机协作-力学功能界面的碰撞检测阈值(指令)参数,执行第4条指令时调用的碰撞检测参数阈值为碰撞检测设置指令设置的参数。
注意事项:碰撞检测设置指令只是临时参数,只对碰撞检测设置指令下面的运动指令有效,不插入碰撞检测设置指令时调用人机协作-力学功能界面的碰撞检测阈值(指令)参数。
DETECTCOLLISION_RESET-碰撞检测参数复位
格式:DETECTCOLLISION_RESET【指令名】。
功能:复位临时使用的碰撞检测阈值,执行此条指令后会调用人机协作-力学功能界面的碰撞检测阈值(指令)参数。
示例:
NOP
MOVL P0001 V=10mm/s PL=0 ACC=1 DEC=1 0
DETECTCOLLISION_SET 1 1 55 55 55 55 55 55
MOVL P0002 V=10mm/s PL=0 ACC=1 DEC=1 0
DETECTCOLLISIONRSET
MOVL P0003 V=10mm/s PL=0 ACC=1 DEC=1 0
END
示例说明:执行第1条指令时调用人机协作-力学功能界面的碰撞检测阈值(指令)参数,执行第4条指令时调用的是第3条指令设置的临时阈值参数,执行第5条指令后检测参数复位,执行第6条指令调用的是人机协作-力学功能界面的碰撞检测阈值(指令)参数。
SWITCH
格式:SWITCH【指令名】。
功能:当SWITCH的参数值与某个CASE值匹配,则会跳到对应的CASE语句块中执行相应的指令,执行完该语句块则会跳出SWITCH;若SWITCH的参数值不与任何一个CASE匹配则运行DEFAULT语句。
参数:
| 参数 | 说明 |
|---|---|
| 变量 | 变量类型:INT,GINT |
示例:
NOP
SWITCH_I001
CASE_1
TIMER T=1
ENDSWITCH_
END
示例说明:当SWITCH的参数值与第一个CASE情况匹配时执行第4条指令,若不匹配执行第5条指令。
CASE
格式:CASE【指令名】。
功能:执行SWITCH时匹配成功会执行相对应的CASE。
参数:
| 参数 | 说明 |
|---|---|
| CASE | 参数只能是整数 |
示例:
NOP
SWITCH_I002
CASE_1
TIMER T=1
CASE_2
TIMER T=2
ENDSWITCH_
END
示例说明:当SWITCH的参数值与第一个CASE情况匹配时执行第4条指令,若不匹配则执行第2个CASE,第2个CASE情况匹配则执行第6条指令,若不匹配执行第7条结束切换指令。
DEFAULT
格式:DEFAULT【指令名】。
功能:当SWITCH参数变量与所存的CASE值均不符合时,执行DEFAULT语句。
示例:
NOP
SWITCH_I002
CASE_1
TIMER T=1
CASE_2
TIMER T=2
DEFAULT_
ENDSWITCH_
END
示例说明:当SWITCH的参数值与第一个和第二个CASE情况都不匹配时执行第8条均不符合指令。
switch-case指令使用教程
指令含义: 当SWITCH的参数I001的值与某个CASE值匹配,则会跳到对应的CASE语句块中执行相应的指令,执行完该语句块则会跳出SWITCH;若I001的值不与任何一个CASE匹配则运行DEFAULT语句。需要注意,DEFAULT指令不是必须添加,如果没有DEFAULT指令,则当没有匹配到CASE时直接跳出SWITCH指令,继续执行之后的语句。
使用场景: 在编写作业文件的时候,当需要条件判断的情况下,往往使用if指令,但是在特定的场景使用if指令就显得比较繁琐,比如菜单选择、io状态判断等情况,需要创建许多if-else分支。此时使用switch-case语句就能使作业文件变得更加结构清晰、易于维护、易于拓展,而且switch-case结构的执行效率通常比if-else结构高,因为switch-case结构当执行到switch语句时,会根据表达式的值直接跳转到对应的代码块,而不需要像if-else结构那样进行多次条件判断。
使用说明: 在纳博特控制系统中,switch-case语句有三个指令----切换-SWITCH,情况-CASE,均不符合-DEFAULT。
- SWITCH
SWITCH 代表切换/跳转到某一个情况。插入SWITCH指令时会自动插入ENDSWITCH指令。SWITCH必须与ENDSWITCH成对出现,否则报错。变量可以选择I,I[],GI,GI[]四种

- CASE
CASE代表情况。例如情况一执行一组语句,情况二执行另一组语句。CASE指令只能输入整数。CASE指令插入在SWITCH和ENDSWITCH之间,SWITCH和CASE之间不允许插入其他指令,否则报错。当SWITCH匹配到某个CASE时执行相应的语句,执行完毕后跳出SWITCH。需注意:单步试运行的时候,不会依次执行和判断每个CASE语句有没有匹配的值,而是会在语法检测时保存CASE条件,执行SWITCH的时候若匹配成功会直接跳到相应的CASE。

- DEFAULT
DEFAULT代表均不符合。当SWITCH参数变量与所存的CASE值均不符合时,执行DEFAULT语句。
使用示例

如图,情况1和情况2会被记录,语法检测时会判断I001和CASE有无匹配,若有则直接跳到该CASE并执行该CASE后面的语句,执行结束就跳出SWITCH语句块。若没有匹配则直接跳到DEFAULT。在该示例中,运行结果为:输出消息"CASE2"。
注:1,该语句不允许有相同CASE,且当前系统不支持SWITCH嵌套功能。
AI 检索专用问答对 (Q&A for Retrieval)
Q: IF-如果指令的参数包括哪些?
A: IF-如果指令的参数包括:参数1(变量类型)、比较方式(如==、<、>等)和参数2(变量类型或自定义值)。
Q: WHILE-循环指令的注意事项有哪些?
A: WHILE-循环指令的注意事项包括:
- 插入WHILE指令的同时会同时插入ENDWHILE指令
- 当程序的开头为WHILE且最后一样指令为ENDWHILE时,请在程序的开头或结尾插入一条TIMER(延时)指令
- 当WHILE内部的指令没有运动类指令或在某种情况下可能会陷入死循环时,请在WHILE与ENDWHILE间插入一条TIMER(延时)指令
Q: SWITCH指令的作用是什么?
A: SWITCH指令用于当参数值与某个CASE值匹配时,跳到对应的CASE语句块中执行相应的指令,执行完该语句块则会跳出SWITCH;若参数值不与任何一个CASE匹配则运行DEFAULT语句。
Q: WAIT_POS-等待运动到点指令的作用是什么?
A: WAIT_POS-等待运动到点指令用于等待伺服电机运行精准到点,再执行下一个指令。MOV指令执行结束并不代表伺服运行结束,仅为点位下发结束。
Q: WAIT_POS-等待运动到点指令的注意事项有哪些?
A: WAIT_POS-等待运动到点指令的注意事项包括:
- 此指令对所有的运动指令有效,必须在运动指令后执行此指令才生效
- 此指令只能仅支持前台程序,后台无运动指令自然也不需要使用
- 此指令不支持提前执行
- 如果机器人在最小等待时间和最大等待时间之间,运动到点了,就会退出等待,执行下一条指令
Q: CRAFTLINE-工艺跳行指令的作用是什么?
A: CRAFTLINE-工艺跳行指令只用于专用工艺,程序中插入该指令设置对应行数,在专用工艺界面运行程序时会先跳转到对应的行数。
Q: CMDNOTE-注释指令的作用是什么?
A: CMDNOTE-注释指令用于在程序适当位置添加注释,便于调试。注释指令在运行时会跳到下一行指令运行,不会有报错提示。
Q: POS_REACHABLE-是否可达判断指令的作用是什么?
A: POS_REACHABLE-是否可达判断指令用于判断目标点是否能到达,点位能够到达选择的状态存入的变量置1,不能到达置0。
Q: READLINEAR-读取线速度指令的作用是什么?
A: READLINEAR-读取线速度指令用于机器人运行的时候实时读取机器人线速度,将读取到的速度存入到变量。
Q: CALL_LUASTRING-调用Lua语句指令的作用是什么?
A: CALL_LUASTRING-调用Lua语句指令用于通过调用Lua语句来实现相应的功能或操作,例如变量的修改,全局、局部点位的获取。
相关资源
版本历史
| 版本 | 日期 | 变更内容 | 作者 |
|---|---|---|---|
| 1.0.0 | 2026-04-13 | 初始版本 | MUZI165 |