Appearance
外部点TCP
外部点的使用方法:
工具手在外部,工件在机器人末端的工具上运动
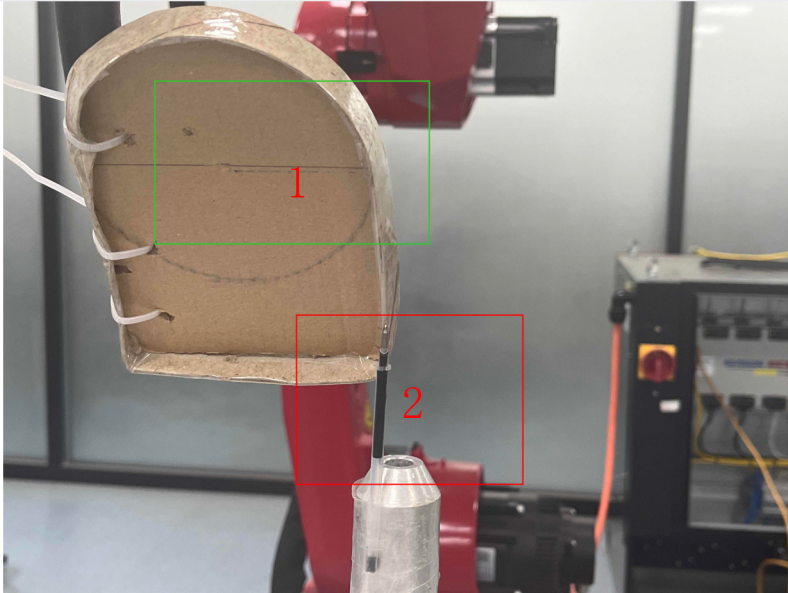
例如图上所示:1代表工件,2代表外部工具手。
标定步骤:
1.标定用户坐标系:
解释:工件上找一个点或者机械臂安装标定锥(尖端就行),工件上找的点或者标定锥与外部工具手尖端对齐,标定用户坐标的原点,然后移动机器人标X,Y。用户原点、X、Y三个点位的姿态要一样。
外部TCP就是工件在机器人上外部尖端固定,移动机器人在尖端上标定用户坐标。咱们正常标用户坐标系是机器人尖端在用户面标定,现在是尖端不动,用户面在机器人上,移动机器人标用户坐标。
2.选中标定好的用户坐标
3.标定工具手(运行时姿态有变化的话就需要标定工具手)
工具手标定方法和以前一样,工件上的点和外部点每标定一个点位都需要两个点对齐
说明:标定用户和工具手时工件上的点是同一个点
4.选中工具手
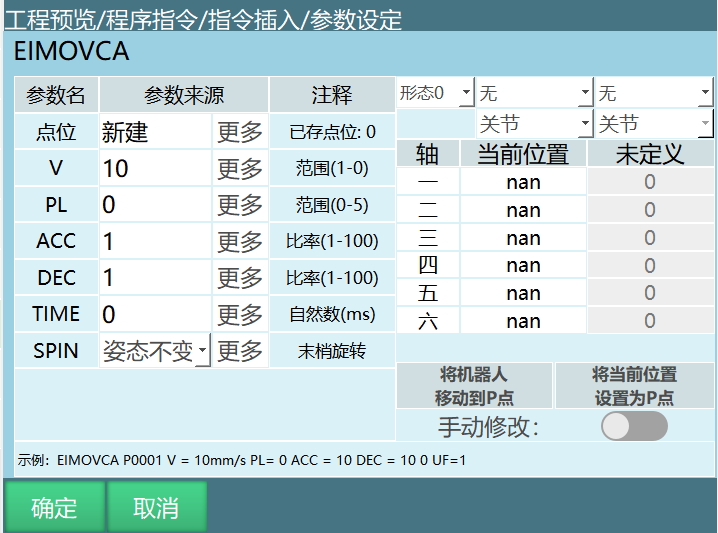
指令介绍
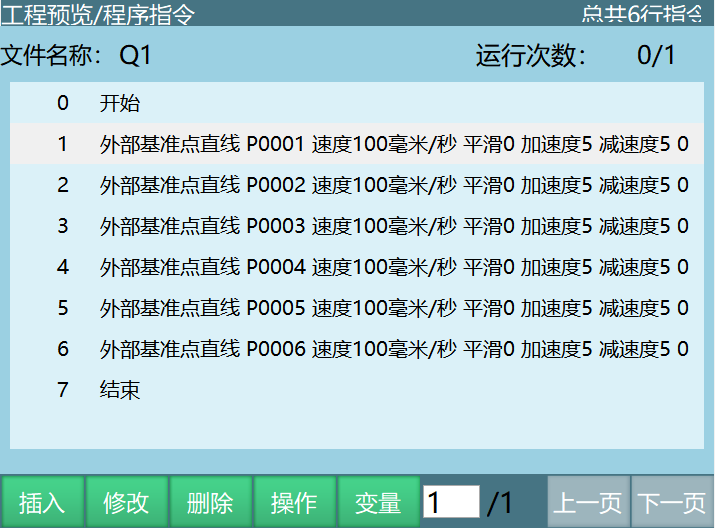
外部基准点直线
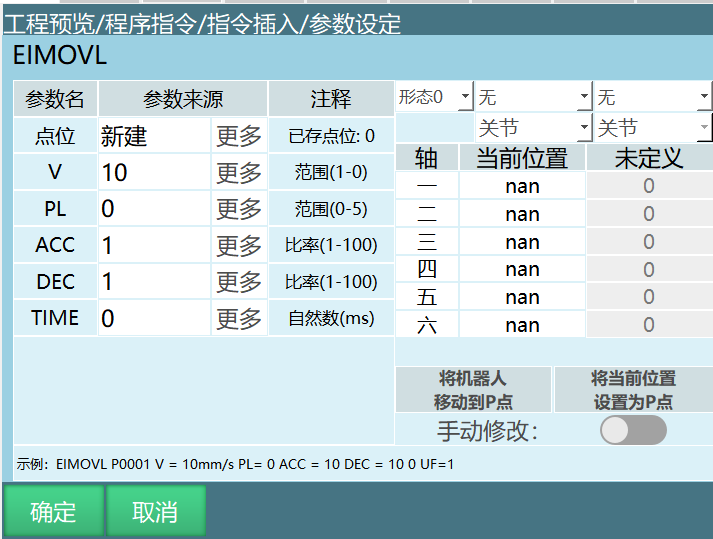
程序编写
外部基准点圆弧
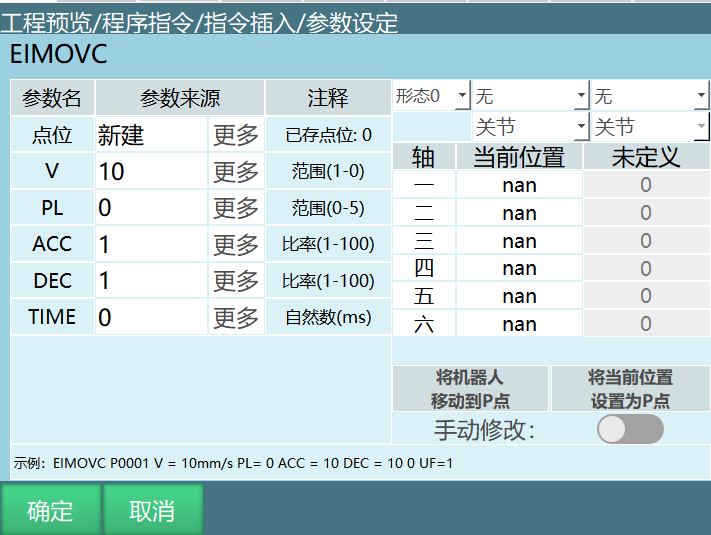
程序编写
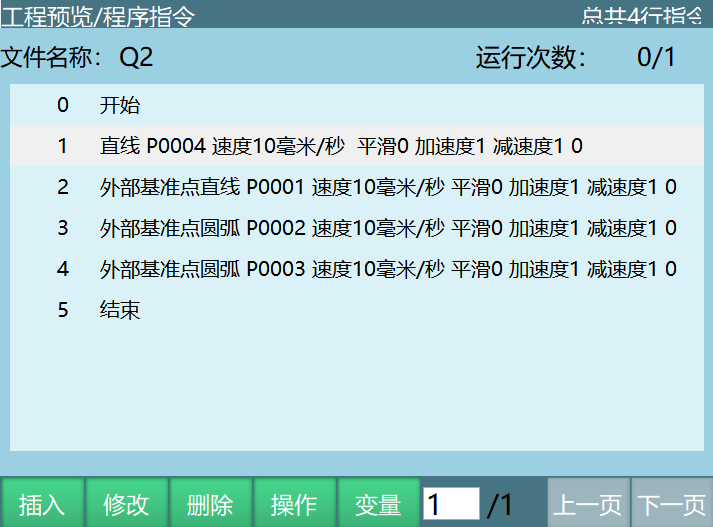
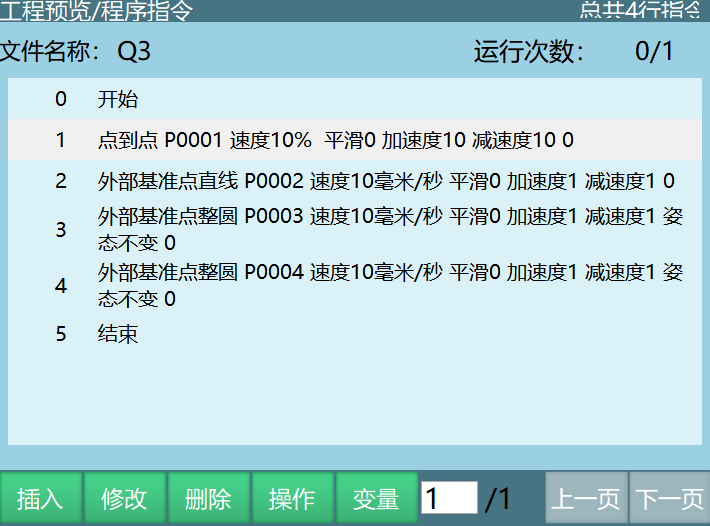
外部基准点整圆
程序编写
AI 检索专用问答对 (Q&A for Retrieval)
Q: 外部点TCP的使用场景是什么?
A: 适用于工具手固定在外部,需要让机器人末端的工件围绕外部工具手运动的场景,例如焊接、切割等工艺。
Q: 标定用户坐标系和工具手时需要注意什么?
A: 标定用户和工具手时,工件上使用的点必须是同一个点,以确保坐标系的一致性。
Q: 如何测试外部点TCP的设置是否正确?
A: 在工件上选择1条测试直线,示教2个点(每个点位要和外部工具手尖端对齐),插入EIMOVL指令,试运行查看轨迹是否符合预期。
Q: 精度不足对后续的运动控制有什么影响?
A: 标定精度直接影响后续运动轨迹的准确性,精度不足会导致工件运动偏差,影响工艺质量(如焊接位置偏移、切割轨迹误差等)。
Q: 如何保证用户原点、X、Y三个点位姿态一致?
A: 标定时保持机器人末端工具的姿态不变,仅移动位置。
Q: 外部点TCP运行出现偏差时,如何进行故障排查和调整?
A: 1.检查标定精度 :重新执行标定流程,确保用户坐标系和工具手标定准确; 2.检查外部工具手 :确认外部工具手是否固定牢固,无松动或位移; 3.检查指令参数 :核对指令中的用户坐标系、工具手选择是否正确; 4.检查机器人状态 :确认机器人各轴运行正常,无机械故障; 5.调整轨迹参数 :根据偏差情况微调指令参数,如速度、加速度或轨迹点; 6.使用测试程序 :编写简单的测试程序,逐步排查问题所在; 7.检查环境因素 :确认工作环境温度、湿度等因素是否影响系统精度。
Q: 外部点TCP相关指令的参数设置有哪些需要特别注意的地方?
A: 1.用户坐标系选择 :确保选择已标定的正确用户坐标系; 2.工具手选择 :选择已标定的外部点工具手; 3.速度和加速度 :根据工件质量和工艺要求设置合适的速度和加速度,避免运动过冲; 4.轨迹类型 :根据实际需求选择直线、圆弧或整圆指令; 5.提前执行时间 :根据工艺要求调整提前执行时间,确保动作协调
相关资源
版本历史
| 版本 | 日期 | 变更内容 | 作者 |
|---|---|---|---|
| 1.0.0 | 2026-04-08 | 初始版本 | MUZI165 |