Appearance
纳博特机器人自动标定系统NexAutoCail使用教程
目前激光标定仪支持的机型有七轴串联多关节、七轴串联CBCBCBA、六轴串联、六轴协作、五轴协作、四轴SCARE、四轴SCARE异型一等机型,后续会适配更多机型
性能测试,目前支持的有轨迹准确度(APt)、轨迹重复度(RPt)、距离准确度(ADp)、距离重复度(RDp)、位姿准确度(APp)、位姿重复度(RPp),其他国标14项内容会逐步完善
标定功能
激光标定仪的标定功能主要是校准机器人本体的参数,主要有DH参数、减速比、耦合比等
标定步骤:
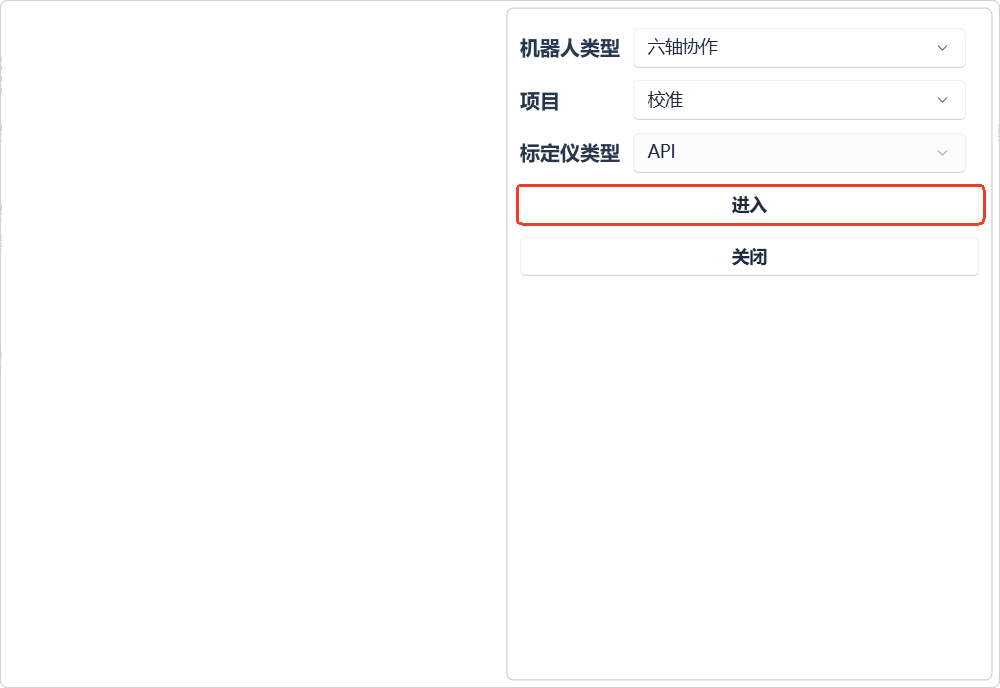
1、双机打开软件,选择符合的机器人类型、项目(校准或性能测试)、标定仪类型(目前支持API、中图两种),选择好后点击【进入】
2、点击【控制器】,输入连接控制器的IP地址(如下图以192.168.3.15为例),点击【连接】
(连接成功,【控制器】按钮背景色为绿色,连接失败背景色为白色)
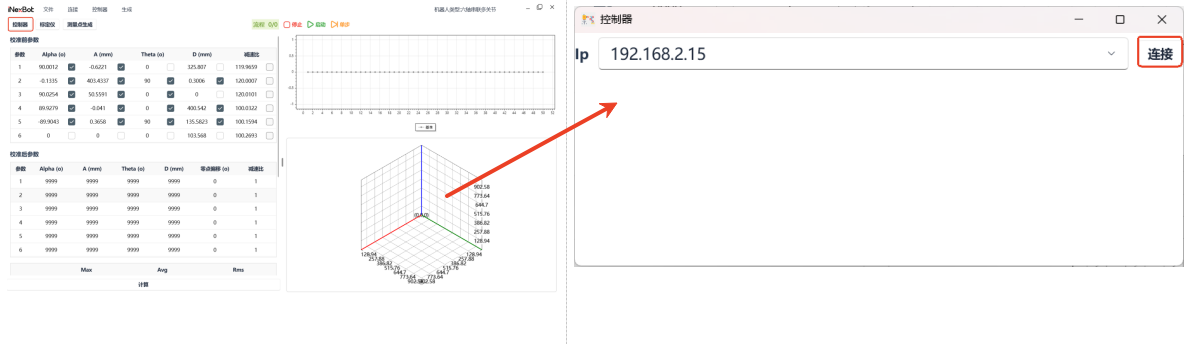
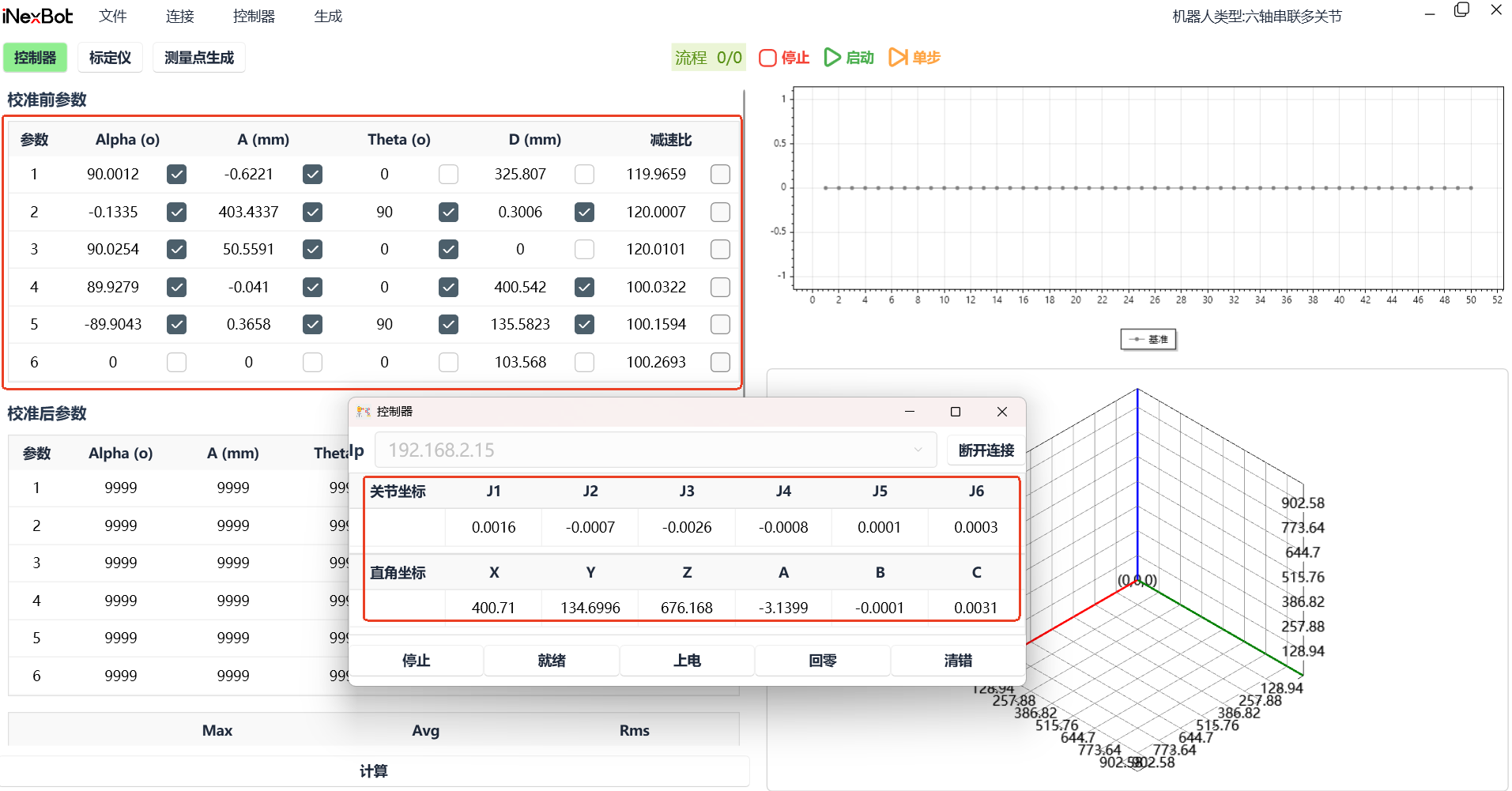
连接上控制器会自动读取机器人DH参数以及当前位置的关机坐标及直角坐标点位信息,如下图所示:
3、连接激光标定仪(以API为例),点击【标定仪】,点击弹窗的【连接】
(连接成功,【标定仪】按钮背景色为绿色,连接失败背景色为白色)
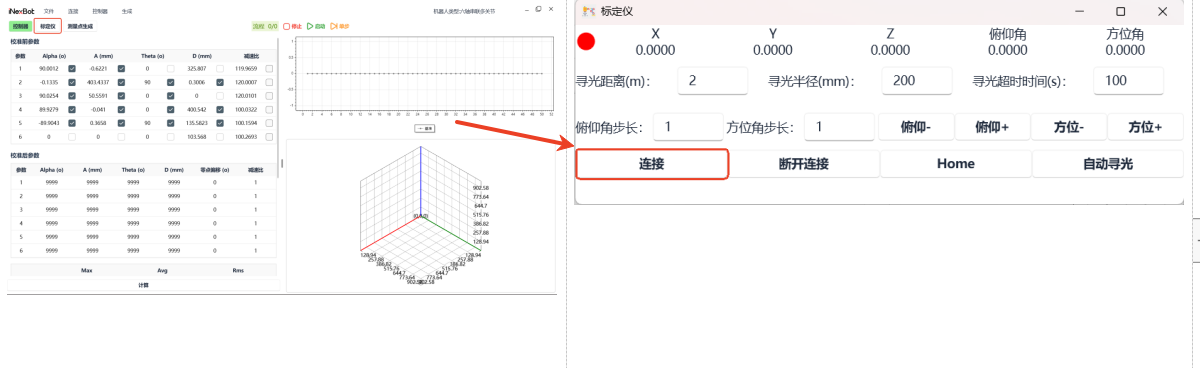
点击【连接】后在依次按照下图所示点击【Connect Tracker】、【OK】(IP不用更改,API激光标定仪默认的IP是192.168.0.168)
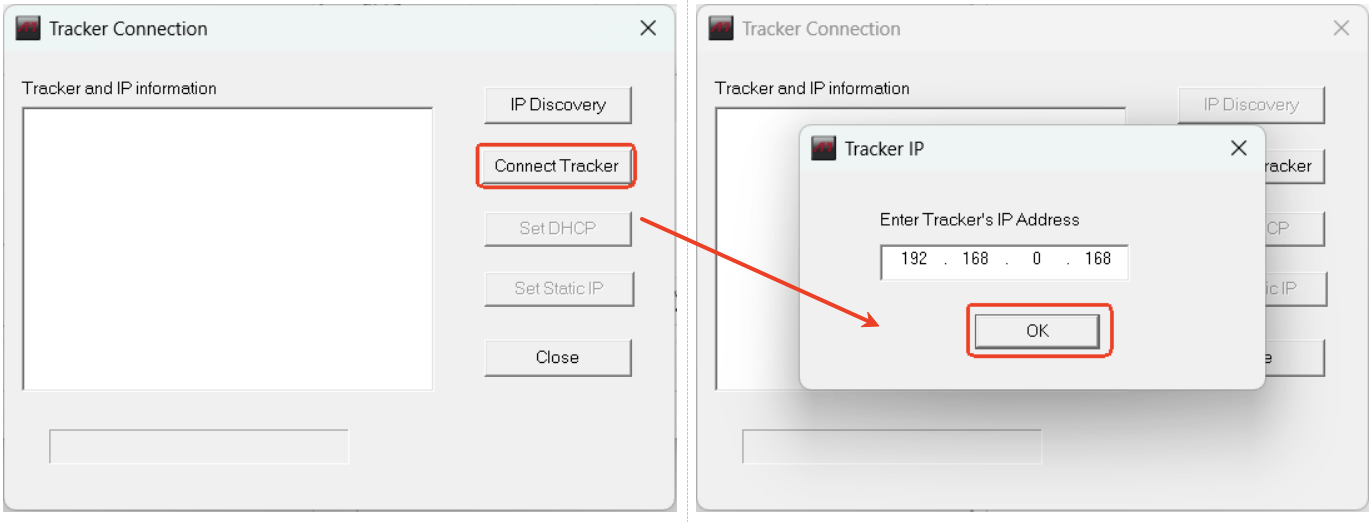
成功连接标定仪后,标定仪弹窗内会有当前激光标定仪靶球位置信息,如下图所示:

(连接成功控制器和标定仪后,将激光标定仪上的靶球放置机器人抓夹处或通过"引光"方式将激光引至机器人夹爪靶球上)
3、生成测试点(通常是50个点)
名词解释:
点数:生成的测试点数
停顿时间:运动相邻两个点位的停顿时间,一般是"1-3"s
姿态变化:默认选A,有"无、A、B、C"四种可选
轴限位:默认不选择,不使用限位,如果场地较小或机器人没有接可以选择"启用直角限位或者启用关节限位或者启用直角限位与关节限位"
(以直角限位为例,在直角坐标下运动X-、X+、Y-、Y+、Z-、Z+,选择合适的位置将示教器的值填写在X、Y、Z的反限位、正限位)

 (测试点位生成完右下角提示)
(测试点位生成完右下角提示)
测量点生成完,点击右下角的【确定】
4、点位生成完点击【启动】(点击前确保机器人是上电状态、激光标定仪的激光在机器人的靶球上)
停止:停止标定过程
单步:

测试点跑完,根据勾选在校准后参数表格会生成新的校准后的参数,
(下图以六轴协作为例展示校准后参数截图)
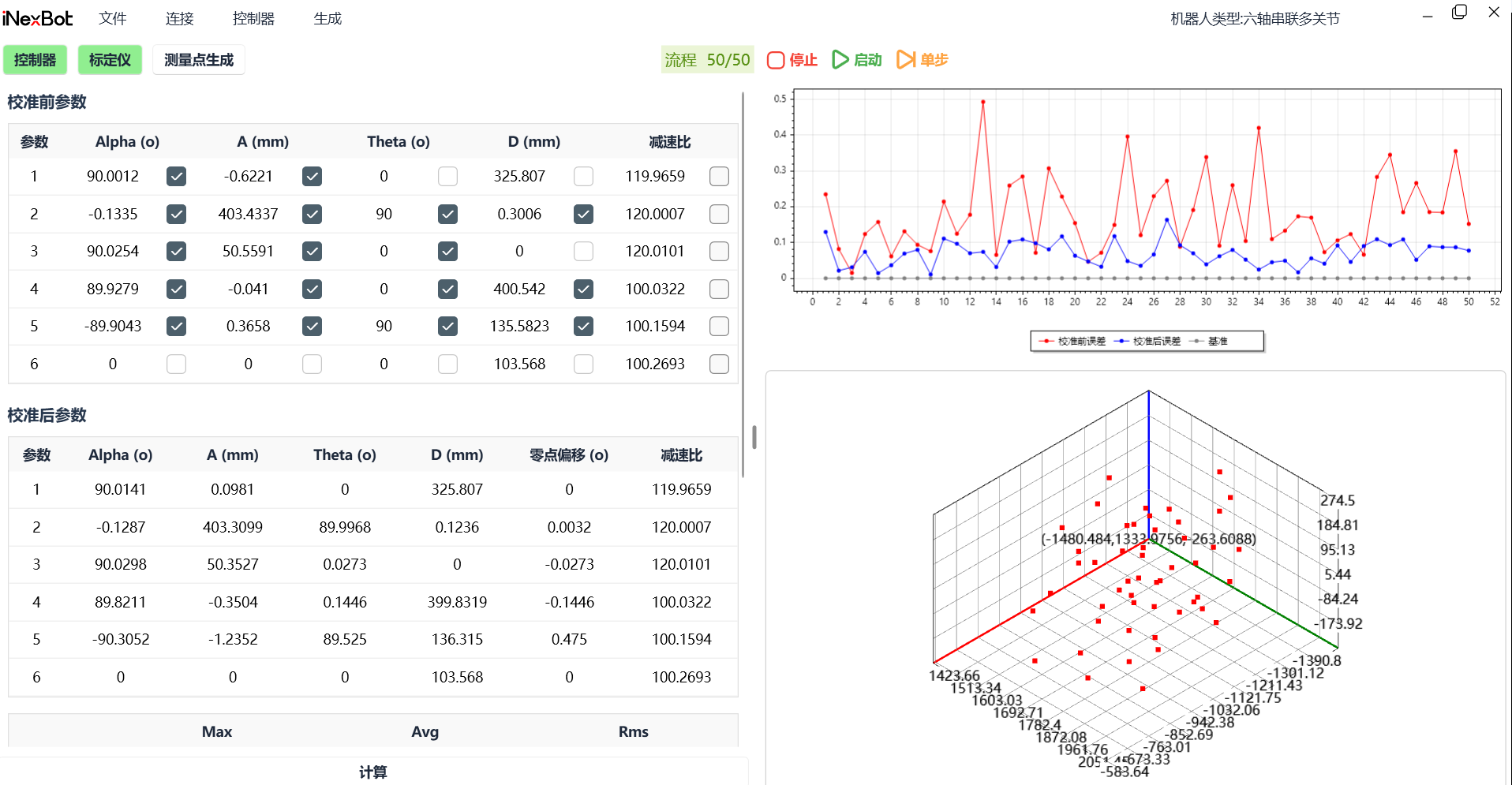

如果需要计算不同的信息,自行勾选后点击【计算】
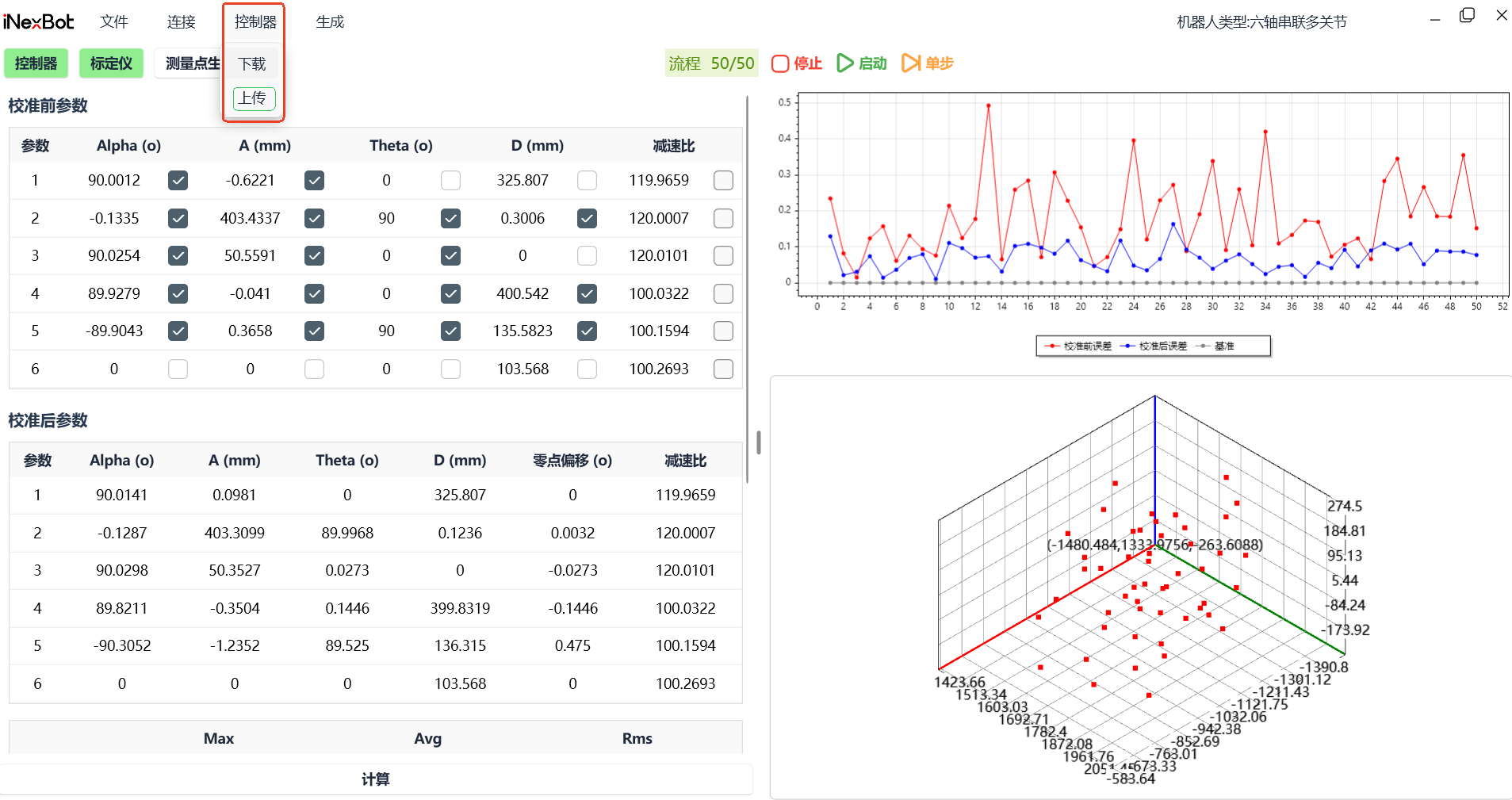
5、上传结果至控制器,计算完成后依次点击【控制器】、【上传】
下载:将控制器参数同步至软件
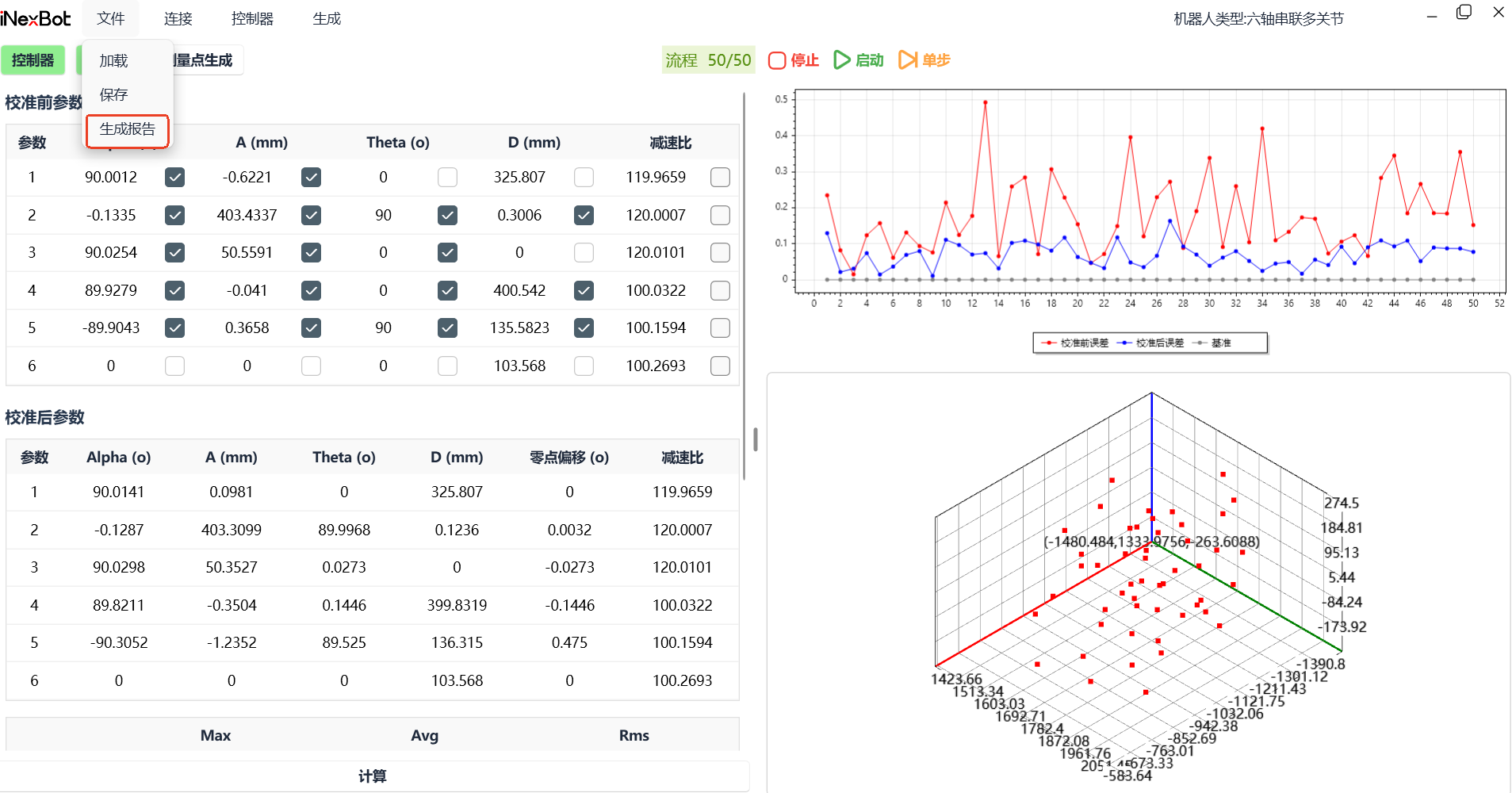
6、生成测试报告,点击【文件】,点击下拉框的【生成报告】
保存:将此次标定过程完整记录保存下来,生成".necal"文件
加载:将保存的necal文件在软件重新打开
国标十四项测试功能
进行十四项测试之前确保控制器和标定仪都以连接上,具体教程如上
1、生成工作空间,确认位姿测试平面和轨迹测试平面。点击【工作空间】,如下图所示:
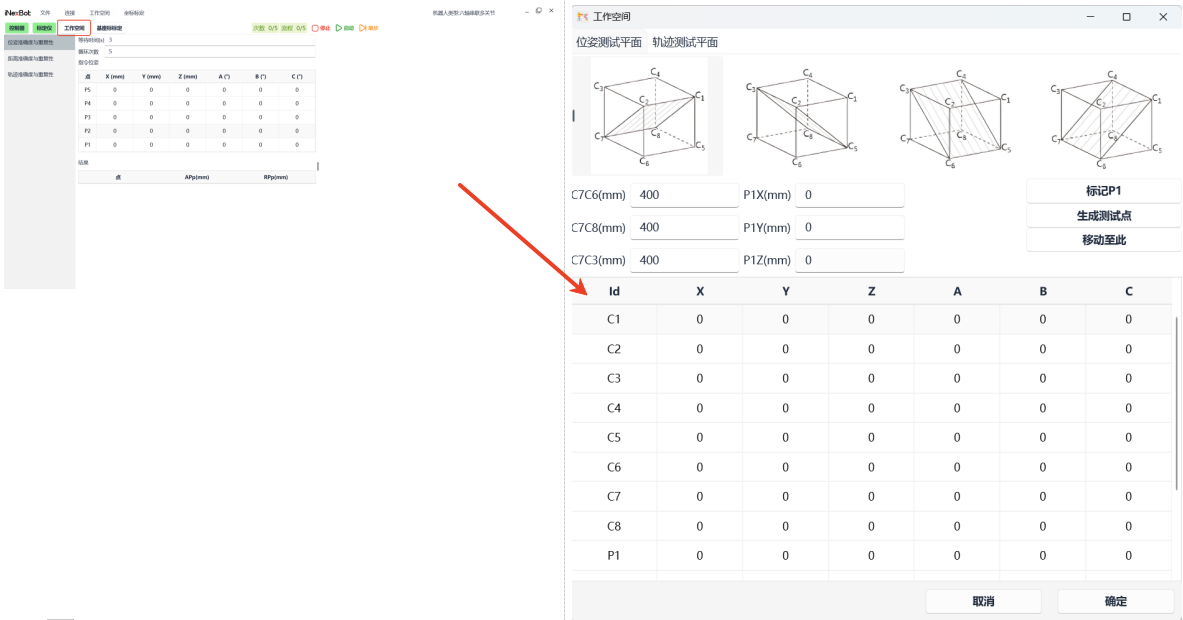
"位姿测试平面"的参数设置:设置C7C6、C7C8、C7C3的值,三个值的填写依据机器人大小及工作空间设定,其中C7C8的值是机器人Y方向的运动轨迹长度。在设置完三个参数后在机器人零点处点击【标记P1】、【生成测试点】
"轨迹测试平面"的参数设置:同位姿测试平面一致,C7C6、C7C8、C7C3的值填写的与位姿测试平面的值相同
在设置好"位姿测试平面"与"轨迹测试平面"后,点击【确定】
2、确定基座标,点击【基座标标定】,如下图所示:
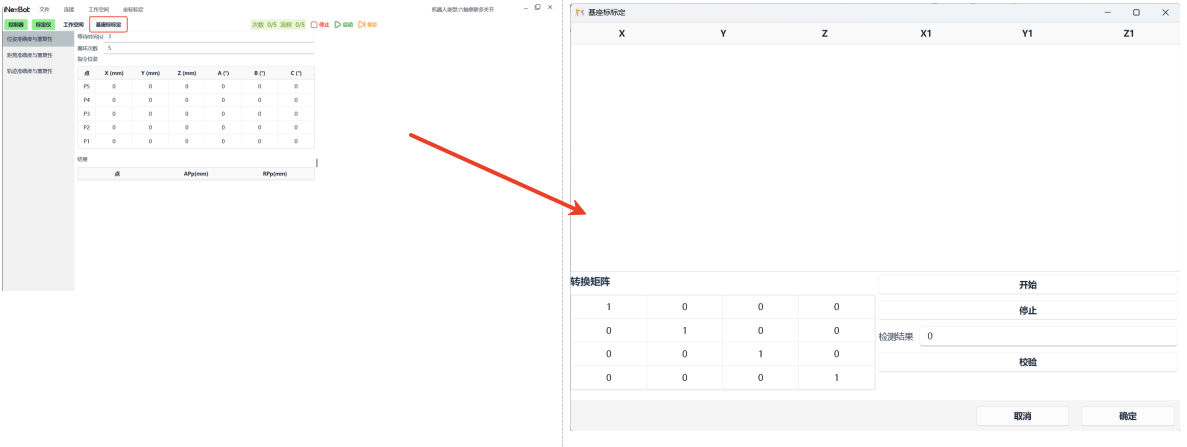
机器人在"零点"处时,点击【开始】(机器人处于上电状态),机器人及激光标定仪会自动进行标定,标定完成后右下角会有绿色弹窗弹出,如下图所示:

标定完成后可以点击【校验】,通常"校验结果"的值在1以内,标定正常。标定完成之后点击【确定】
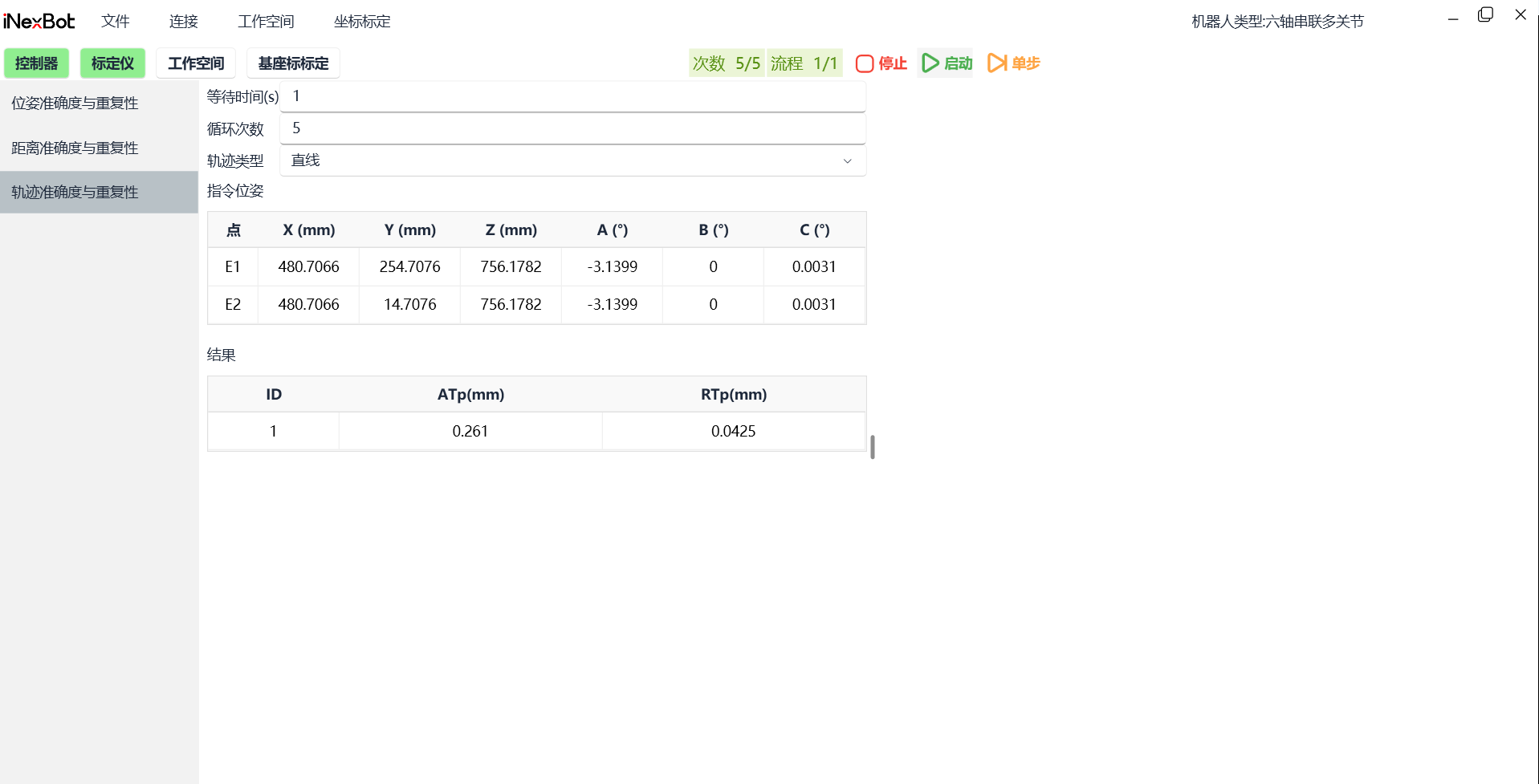
3、开始十四项测试,下图以"轨迹准确度与重复度"为例
点击【轨迹准确度与重复度】,填写等待时间(默认3s)与循环次数,轨迹类型有"直线、小圆、大圆",确认完之后点击【启动】,执行完结果自动出现在底部,如下图所示
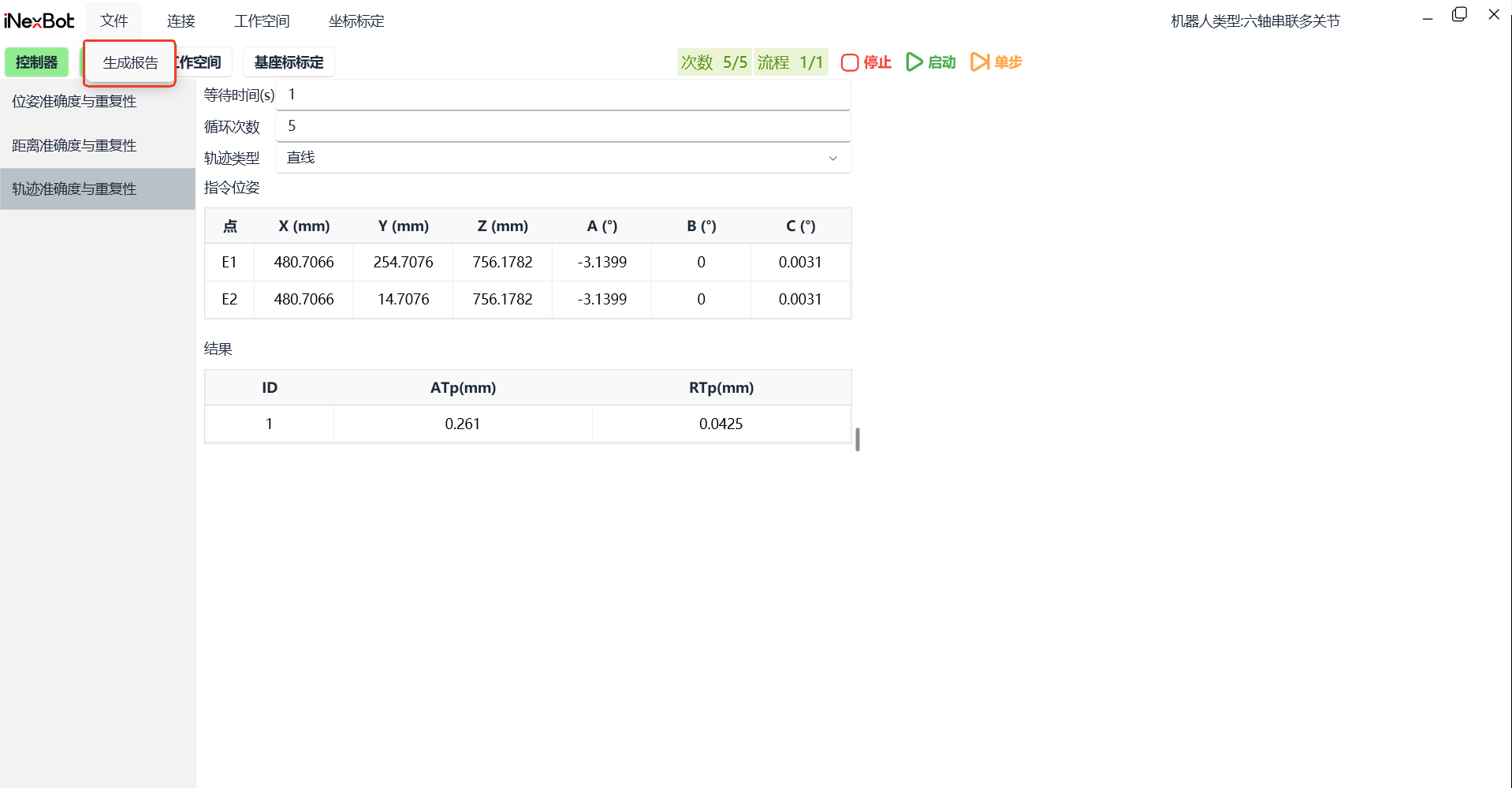
如果需要生成相应报告,点击文件,点击下拉框的【生成报告】
标定注意事项:
整个标定及测试过程中一定不可以出现"丢光"现象
标定及测试过程中如果出现人为现象导致控制器断开,需要重启控制器进行连接
标定仪放置地面须平整、质地硬(地板等软地面会影响测量精度)
标定仪测试过程中周边减少行人走动
标定仪引光至机器人之前一定要让标定仪数据稳定(回Home点后等待几秒让数据稳定)
测试环境尽量稳定(例如不要在风向口,不要直吹等)
AI 检索专用问答对 (Q&A for Retrieval)
Q: 激光标定仪目前支持哪些机型?
A: 目前支持七轴串联多关节、七轴串联CBCBCBA、六轴串联、六轴协作、五轴协作、四轴SCARE、四轴SCARE异型一等机型,后续会适配更多机型。
Q: 性能测试目前支持哪些项目?
A: 目前支持轨迹准确度(APt)、轨迹重复度(RPt)、距离准确度(ADp)、距离重复度(RDp)、位姿准确度(APp)、位姿重复度(RPp),其他国标14项内容会逐步完善。
Q: 激光标定仪的标定功能主要是什么?
A: 激光标定仪的标定功能主要是校准机器人本体的参数,主要有DH参数、减速比、耦合比等。
Q: 标定步骤是什么?
A: 1. 双机打开软件,选择符合的机器人类型、项目、标定仪类型,点击【进入】;2. 点击【控制器】,输入连接控制器的IP地址,点击【连接】;3. 连接激光标定仪,点击【标定仪】,点击弹窗的【连接】,然后依次点击【Connect Tracker】、【OK】;4. 生成测试点(通常是50个点),设置点数、停顿时间、姿态变化、轴限位等参数;5. 点位生成完点击【启动】,确保机器人是上电状态、激光标定仪的激光在机器人的靶球上;6. 上传结果至控制器,计算完成后依次点击【控制器】、【上传】;7. 生成测试报告,点击【文件】,点击下拉框的【生成报告】。
Q: 如何判断控制器连接是否成功?
A: 连接成功,【控制器】按钮背景色为绿色,连接失败背景色为白色。
Q: 如何判断标定仪连接是否成功?
A: 连接成功,【标定仪】按钮背景色为绿色,连接失败背景色为白色。成功连接标定仪后,标定仪弹窗内会有当前激光标定仪靶球位置信息。
Q: 什么是点数、停顿时间、姿态变化、轴限位?
A: 点数:生成的测试点数;停顿时间:运动相邻两个点位的停顿时间,一般是"1-3"s;姿态变化:默认选A,有"无、A、B、C"四种可选;轴限位:默认不选择,不使用限位,如果场地较小或机器人没有接可以选择"启用直角限位或者启用关节限位或者启用直角限位与关节限位"。
Q: 国标十四项测试功能如何使用?
A: 1. 生成工作空间,确认位姿测试平面和轨迹测试平面,点击【工作空间】;2. 确定基座标,点击【基座标标定】,机器人在"零点"处时,点击【开始】;3. 开始十四项测试,选择相应的测试项目(如轨迹准确度与重复度),填写等待时间与循环次数,选择轨迹类型,点击【启动】。
Q: 如何验证基座标标定是否正常?
A: 标定完成后可以点击【校验】,通常"校验结果"的值在1以内,标定正常。
Q: 标定过程中有哪些注意事项?
A: 1. 整个标定及测试过程中一定不可以出现"丢光"现象;2. 标定及测试过程中如果出现人为现象导致控制器断开,需要重启控制器进行连接;3. 标定仪放置地面须平整、质地硬;4. 标定仪测试过程中周边减少行人走动;5. 标定仪引光至机器人之前一定要让标定仪数据稳定;6. 测试环境尽量稳定(例如不要在风向口,不要直吹等)。