Appearance
1. 自适应加减速度功能概述
功能说明: 自适应加减速使能开启后可以保护电机,防止电机运动时转矩过大。
适用范围: 仅支持四轴SCARA机器人。
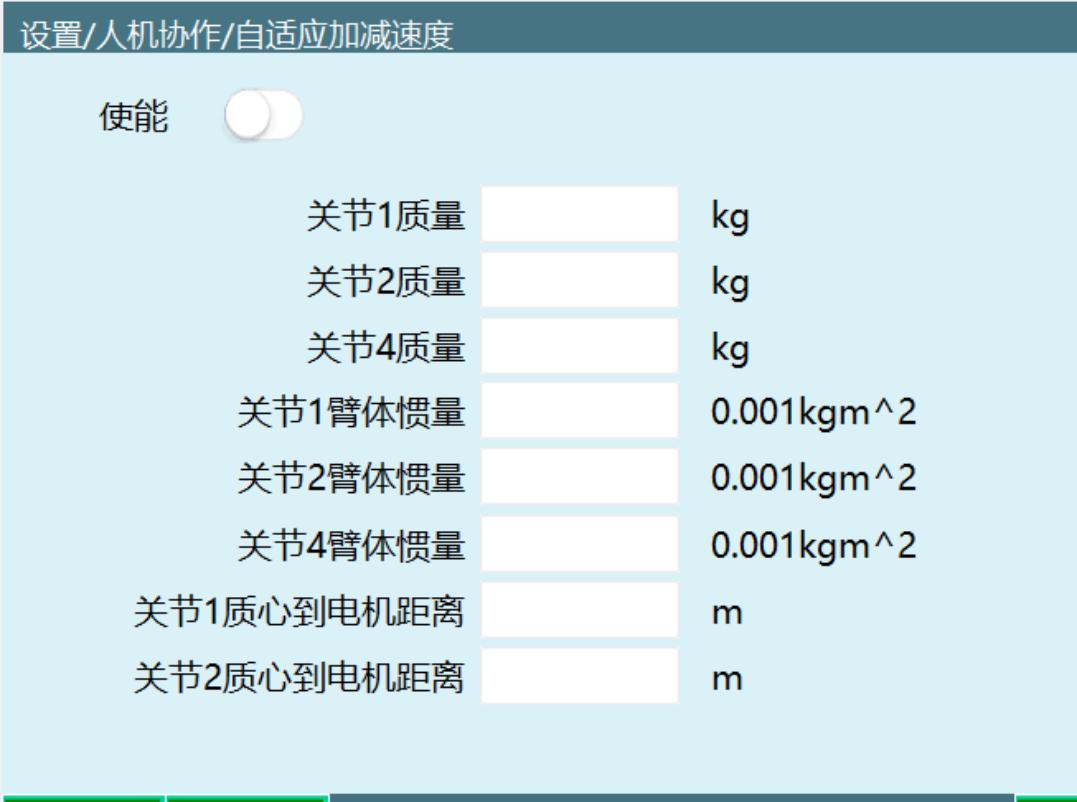
设置路径: 设置 → 人机协作 → 自适应加减速度
根据设计人员提供的负载3D图,找到对应的数据,输入负载质量、负载惯量、各方向质心。
2. 参数设置界面
> 2.1 使能开关
- 功能: 自适应加减速功能的总开关
- 说明: 填写相应的参数后,打开使能开关后功能生效
> 2.2 关节质量参数
关节质量参数用于描述机器人各关节连杆的质量特性。
| 参数 | 说明 |
|---|---|
| 关节1质量 | 机器人一轴到二轴的连杆,图中a1位置 |
| 关节2质量 | 机器人二轴到三轴的连杆,图中a2位置 |
| 关节4质量 | 机器人上下运动的丝杆质量 |
| 单位 | kg |
参考示意图:
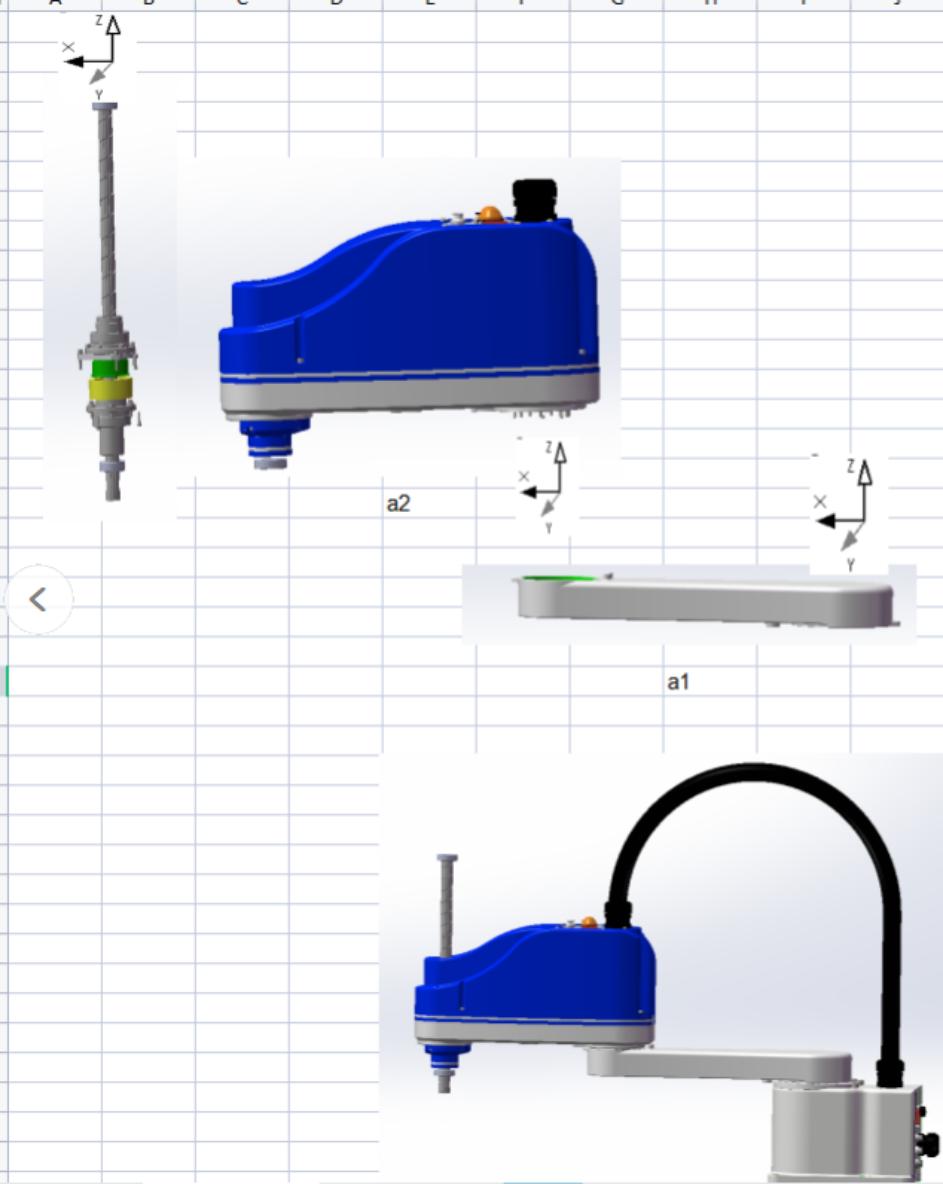
图一
关节1质量 (a1位置)
↓
机器人一轴 ──────→ 二轴
↓
关节2质量 (a2位置)> 2.3 关节臂体惯量
各关节的臂体惯量和质心到电机距离参考系如下图所示。
| 参数 | 说明 |
|---|---|
| 关节1臂体惯量 | 关节1连杆的转动惯量 |
| 关节2臂体惯量 | 关节2连杆的转动惯量 |
| 关节4臂体惯量 | 关节4丝杆的转动惯量 |
| 单位 | 0.001kgm² |
参考系:
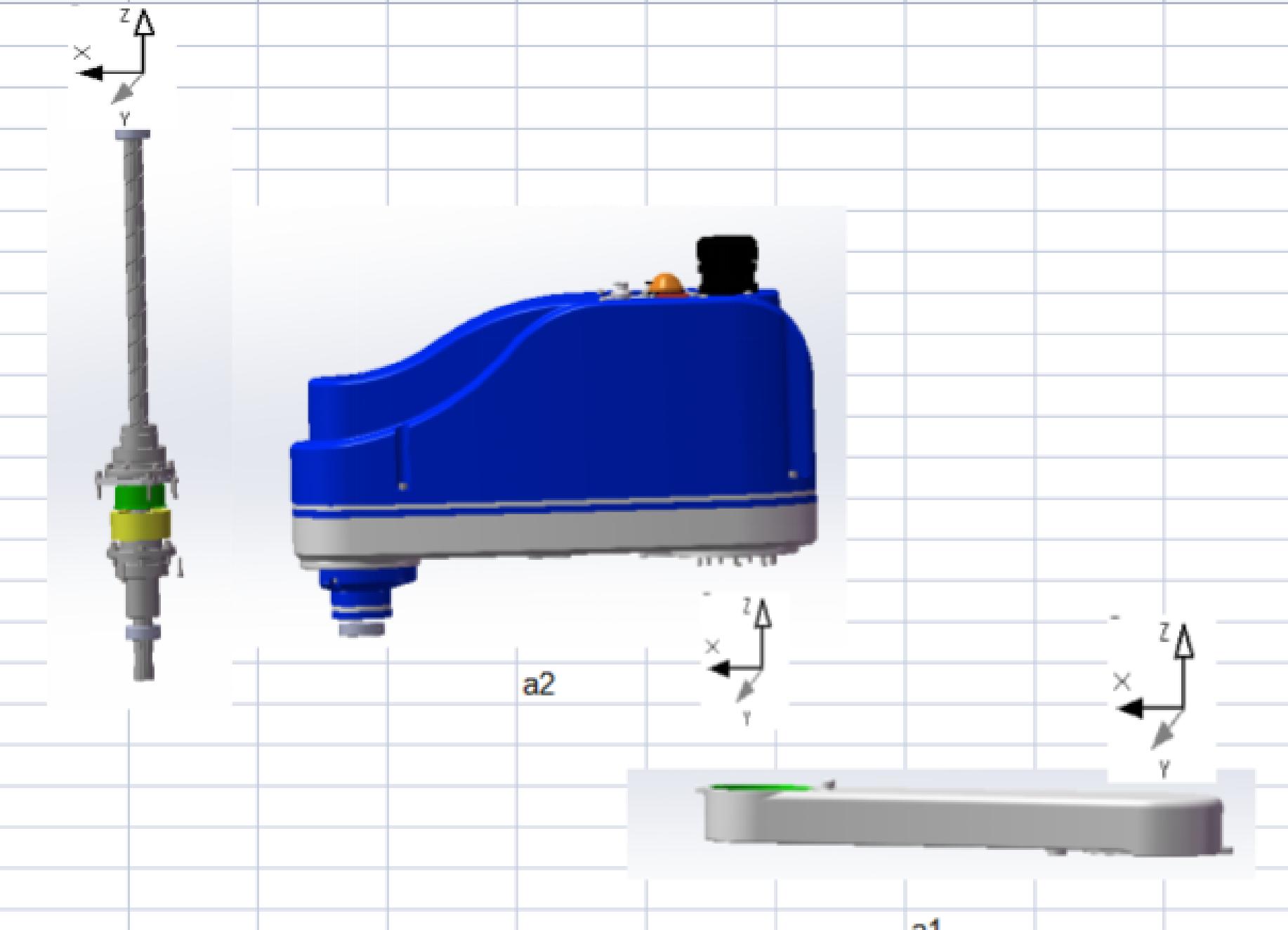
a2位置示意图
> 2.4 关节质心到电机距离
各关节质心到电机距离用于描述质量分布对惯量的影响。
| 参数 | 说明 |
|---|---|
| 关节1质心到电机距离 | 关节1质心到驱动电机的距离 |
| 关节2质心到电机距离 | 关节2质心到驱动电机的距离 |
| 关节4质心到电机距离 | 关节4质心到驱动电机的距离 |
| 单位 | m |
> 2.5 阈值参数

阈值参数分为:上限阈值、下限阈值。下面以上限阈值、第一轴为例进行描述。
2.5.1 速度阈值参数
图三:速度阈值-速度关系曲线
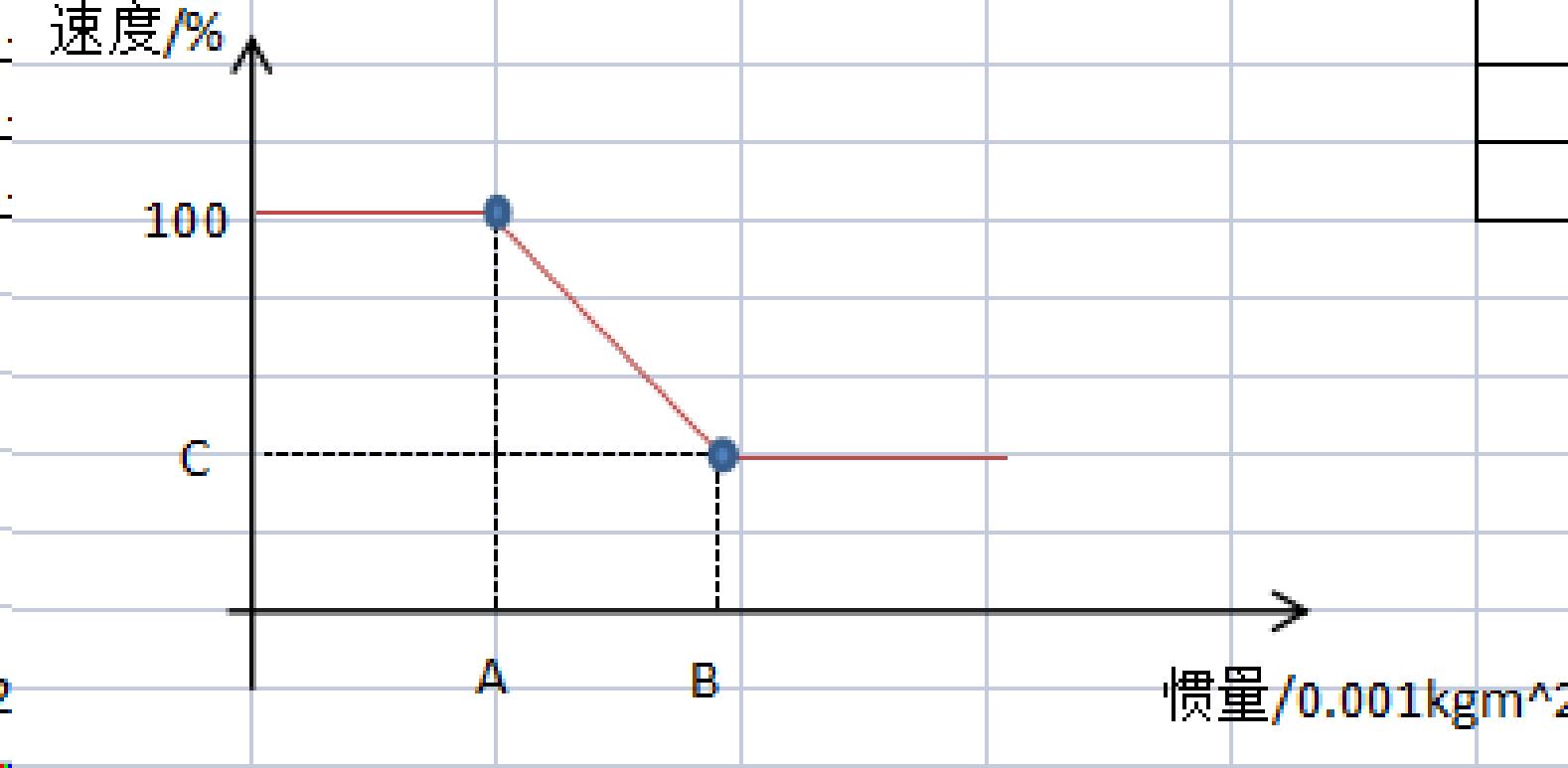
图标标注含义:
| 标注 | 说明 |
|---|---|
| 图三B | 速度阈值上限 |
| 图三100 | 图三A对应的速度值 |
| 图三A | 速度阈值下限 |
| 图三C | 图三B对应的速度值 |
速度阈值参数说明:
| 参数 | 说明 |
|---|---|
| 关节1速度阈值上限 (%) | 关节1速度的上限阈值 |
| 0.001kgm²对应速度 (%) | 惯量为0.001kgm²时对应的速度值 |
| 关节2速度阈值上限 (%) | 关节2速度的上限阈值 |
| 0.001kgm²对应速度 (%) | 惯量为0.001kgm²时对应的速度值 |
| 关节3速度阈值上限 (%) | 关节3速度的上限阈值 |
| 对应速度 (%) | 惯量值对应的速度值(单位:kg) |
| 关节4速度阈值上限 (%) | 关节4速度的上限阈值 |
| 0.001kgm²对应速度 (%) | 惯量为0.001kgm²时对应的速度值 |
2.5.2 加速度阈值参数
图四:加速度阈值-加速度关系曲线
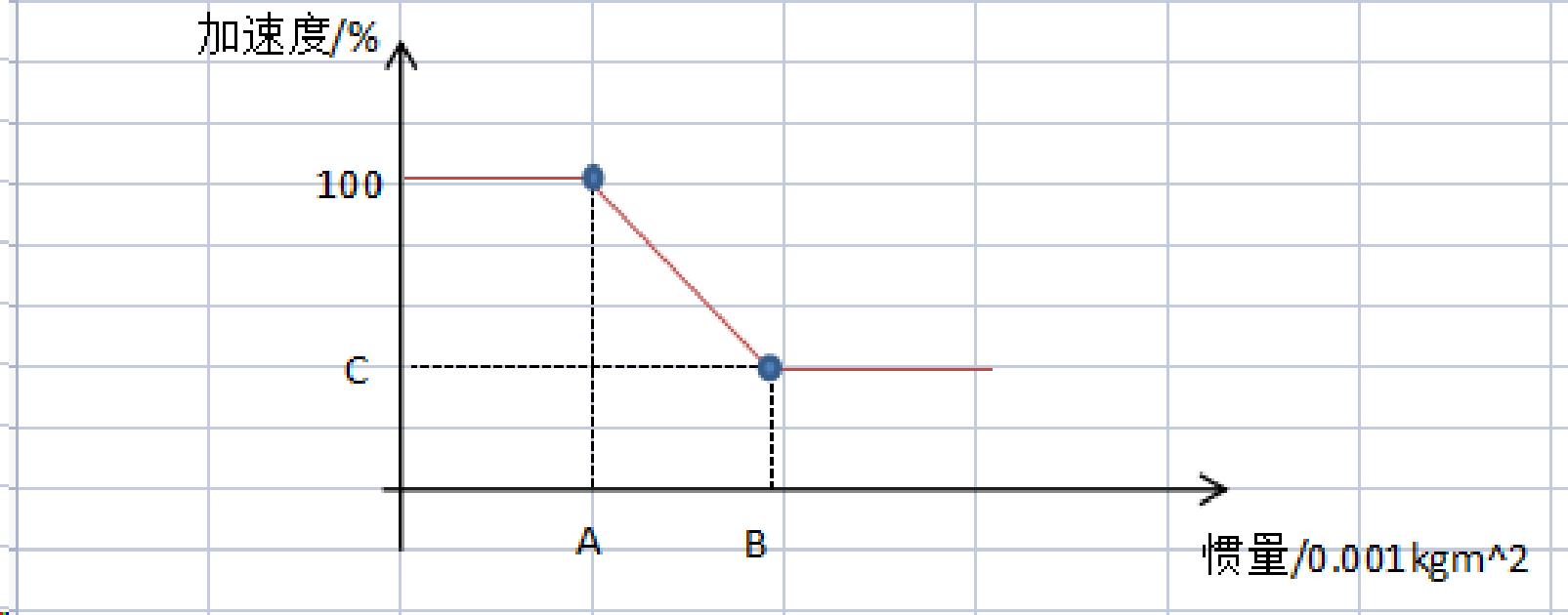
图标标注含义:
| 标注 | 说明 |
|---|---|
| 图四B | 加速度阈值上限 |
| 图四100 | 图四A对应的速度值 |
| 图四A | 加速度阈值下限 |
| 图四C | 图四B对应的速度值 |
加速度阈值参数说明:
| 参数 | 说明 |
|---|---|
| 关节1加速度阈值上限 (%) | 关节1加速度的上限阈值 |
| 0.001kgm²对应加速度 (%) | 惯量为0.001kgm²时对应的加速度值 |
| 关节2加速度阈值上限 (%) | 关节2加速度的上限阈值 |
| 0.001kgm²对应加速度 (%) | 惯量为0.001kgm²时对应的加速度值 |
| 关节3加速度阈值上限 (%) | 关节3加速度的上限阈值 |
| 对应加速度 (%) | 惯量值对应的加速度值(单位:kg) |
| 关节4加速度阈值上限 (%) | 关节4加速度的上限阈值 |
| 0.001kgm²对应加速度 (%) | 惯量为0.001kgm²时对应的加速度值 |
下限参数设置: 界面提供返回、修改、下限参数选项,用于配置下限阈值。
3. 实现原理
工作原理: 根据机械臂和负载参数,计算启停位置的惯量值,并根据惯量与以上设定的速度、加速度参数对应关系,确定最终运行时的速度值和加速度值。
重要说明:
| 注意事项 | 说明 |
|---|---|
| 三轴横坐标 | 三轴的横坐标为质量 |
| 速度/加速度限制 | 对应的速度和加速度不可以超过100% |
| 惯量计算 | 根据机械臂质量和负载质量综合计算 |
| 自适应调节 | 系统根据实时惯量自动调节运行参数 |
计算逻辑:
输入参数:
├── 机械臂质量参数(关节1/2/4质量)
├── 机械臂惯量参数(关节1/2/4臂体惯量)
├── 机械臂质心距离(关节1/2/4质心到电机距离)
├── 负载质量参数
├── 负载惯量参数
├── 负载质心参数
└── 阈值参数(速度/加速度上下限)
计算过程:
1. 计算启停位置的总惯量值
2. 根据惯量值在阈值曲线中查找对应的速度和加速度
3. 确定最终运行的速度值和加速度值
输出结果:
├── 实际运行速度
└── 实际运行加速度4. 负载质量设置

设置路径: 设置 → 工具手标定
负载质量设置界面用于配置末端负载的物理参数。
4.1 负载参数说明
| 参数 | 说明 | 单位 |
|---|---|---|
| 选择工具手 | 选择要设置的工具手编号 | - |
| 切换到无工具手状态 | 切换到无工具状态进行设置 | - |
| x轴方向偏移 | 负载质心在X方向的偏移距离 | mm |
| y轴方向偏移 | 负载质心在Y方向的偏移距离 | mm |
| z轴方向偏移 | 负载质心在Z方向的偏移距离 | mm |
| 绕A轴旋转 | 负载绕A轴的旋转角度 | rad |
| 绕B轴旋转 | 负载绕B轴的旋转角度 | rad |
| 绕C轴旋转 | 负载绕C轴的旋转角度 | rad |
| 负载质量 | 机器人末梢负载总质量 | kg |
| 负载惯量 | 负载的转动惯量 | 0.001kgm² |
| 负载质心X | 负载质心在X方向的坐标 | m |
| 负载质心Y | 负载质心在Y方向的坐标 | m |
| 负载质心Z | 负载质心在Z方向的坐标 | m |
| 注释 | 负载参数的说明文字 | - |
4.2 参数获取方法
数据来源: 根据设计人员提供的负载3D图,找到对应的数据,输入负载质量、负载惯量、各方向质心。
操作步骤:
- 准备负载3D图: 从设计人员处获取负载的3D模型图纸
- 提取物理参数: 从3D图中提取负载的质量、惯量、质心位置等参数
- 填写界面参数: 将提取的参数填写到负载质量设置界面
- 保存设置: 点击"修改"或"保存"按钮保存参数
- 清除设置: 如需清除参数,可点击"清除"按钮
4.3 操作按钮说明
| 按钮 | 功能 |
|---|---|
| 选中 | 选中当前工具手编号 |
| 切换到无工具手状态 | 切换到无工具状态 |
| 修改 | 进入参数修改状态 |
| 清除 | 清除当前设置的负载参数 |
4.4 设置流程
开始设置
↓
选择工具手编号
↓
切换到无工具手状态
↓
根据负载3D图提取参数
↓
填写负载参数:
├── 质量参数(kg)
├── 惯量参数(0.001kgm²)
├── 质心位置(m)
└── 方向偏移(mm/rad)
↓
点击"修改"保存设置
↓
设置完成4.5 使用注意事项
| 注意事项 | 说明 |
|---|---|
| 参数准确性 | 负载参数的准确性直接影响自适应加减速的效果 |
| 3D图参考 | 必须根据设计人员提供的负载3D图进行参数提取 |
| 单位一致性 | 注意各项参数的单位,避免单位错误导致参数设置错误 |
| 参数保存 | 修改参数后必须点击"修改"或"保存"按钮才能生效 |
| 定期校准 | 如负载发生变化,需要重新设置负载参数 |
5. Q&A
Q: 自适应加减速度功能的作用是什么?
A: 自适应加减速使能开启后可以保护电机,防止电机运动时转矩过大。该功能仅支持四轴SCARA机器人。
Q: 自适应加减速度功能适用于哪些类型的机器人?
A: 自适应加减速度功能仅支持四轴SCARA机器人。
Q: 自适应加减速度功能的设置路径是什么?
A: 设置路径为:设置 → 人机协作 → 自适应加减速度。
Q: 关节1质量、关节2质量、关节4质量分别指什么?
A: 关节1质量是指机器人一轴到二轴的连杆质量(图中a1位置);关节2质量是指机器人二轴到三轴的连杆质量(图中a2位置);关节4质量是指机器人上下运动的丝杆质量。单位均为kg。
Q: 关节臂体惯量的单位是什么?
A: 关节臂体惯量的单位是0.001kgm²,包括关节1臂体惯量、关节2臂体惯量、关节4臂体惯量。
Q: 关节质心到电机距离的单位是什么?
A: 关节质心到电机距离的单位是m(米)。
Q: 阈值参数分为哪两类?
A: 阈值参数分为上限阈值和下限阈值两类。
Q: 速度阈值上限和速度阈值下限在图中的含义是什么?
A: 在速度阈值-速度关系曲线中:图三B表示速度阈值上限,图三A表示速度阈值下限,图三100是图三A对应的速度值,图三C是图三B对应的速度值。
Q: 加速度阈值上限和加速度阈值下限在图中的含义是什么?
A: 在加速度阈值-加速度关系曲线中:图四B表示加速度阈值上限,图四A表示加速度阈值下限,图四100是图四A对应的速度值,图四C是图四B对应的速度值。
Q: 自适应加减速度的实现原理是什么?
A: 实现原理是根据机械臂和负载参数,计算启停位置的惯量值,并根据惯量与设定的速度、加速度参数对应关系,确定最终运行时的速度值和加速度值。
Q: 三轴的横坐标代表什么?有什么限制?
A: 三轴的横坐标为质量,对应的速度和加速度不可以超过100%。
Q: 负载质量设置的路径是什么?
A: 负载质量设置路径为:设置 → 工具手标定。
Q: 负载参数包括哪些内容?
A: 负载参数包括:x/y/z轴方向偏移(单位mm)、绕A/B/C轴旋转(单位rad)、负载质量(单位kg)、负载惯量(单位0.001kgm²)、负载质心X/Y/Z(单位m)以及注释。
Q: 如何获取负载参数的数据?
A: 根据设计人员提供的负载3D图,找到对应的数据,输入负载质量、负载惯量、各方向质心。
Q: 负载质量的单位是什么?
A: 负载质量的单位是kg。
Q: 负载惯量的单位是什么?
A: 负载惯量的单位是0.001kgm²。
Q: 负载质心的单位是什么?
A: 负载质心的单位是m(米)。
Q: 方向偏移的单位是什么?
A: 方向偏移(x/y/z轴方向偏移)的单位是mm(毫米)。
Q: 绕轴旋转的单位是什么?
A: 绕轴旋转(绕A/B/C轴旋转)的单位是rad(弧度)。
Q: 负载参数修改后如何保存?
A: 点击"修改"或"保存"按钮保存参数。
Q: 如何清除负载参数设置?
A: 点击"清除"按钮可以清除当前设置的负载参数。
Q: 自适应加减速度功能在什么情况下需要设置负载参数?
A: 当机器人末端安装有负载时,需要根据负载3D图提取相关参数并设置到负载质量设置界面,以确保自适应加减速功能的准确性。
Q: 负载参数的准确性对自适应加减速度功能有什么影响?
A: 负载参数的准确性直接影响自适应加减速度的效果,参数不准确可能导致电机保护不足或过度限制。
Q: 设置自适应加减速度功能需要哪些参数?
A: 设置自适应加减速度功能需要:关节质量参数、关节臂体惯量、关节质心到电机距离、阈值参数(速度和加速度上下限)、负载质量、负载惯量、负载质心位置等参数。