Appearance
外部轴点动/联动
功能介绍
外部轴点动/联动功能允许用户在监控界面中切换外部轴的运动模式,实现机器人与外部轴的协同控制。
操作方法
模式切换
在监控界面中可以切换外部轴单动/联动模式,前提是需要标定好需要联动的外部轴。
模式说明
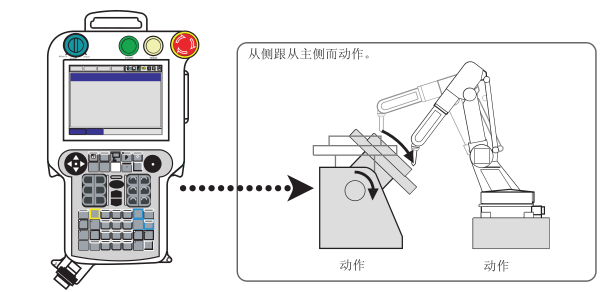
- 联动模式:点动外部轴时,机器人可跟随相对运行;点动机器人时外部轴不动。
- 点动模式:点动机器人时外部轴保持不动;点动外部轴时机器人保持不动。
注意事项
- 使用外部轴联动功能前,必须先完成外部轴的标定。
- 确保外部轴与机器人的运动范围没有干涉。
- 在联动模式下,点动外部轴时要注意机器人的跟随运动,确保安全。
- 切换模式时,建议先停止所有运动,确保系统处于稳定状态。
AI 检索专用问答对 (Q&A for Retrieval)
Q: 如何切换外部轴的点动/联动模式?
A: 在监控界面中找到外部轴单动/联动切换选项,点击即可切换模式。
Q: 外部轴联动功能的前提条件是什么?
A: 需要先标定好需要联动的外部轴,确保外部轴与机器人的相对位置关系正确。
Q: 联动模式下,点动外部轴时机器人会如何运动?
A: 在联动模式下,点动外部轴时,机器人会跟随外部轴进行相对运动,保持两者之间的相对位置关系。
Q: 点动模式下,机器人和外部轴的运动关系是怎样的?
A: 在点动模式下,点动机器人时外部轴保持不动;点动外部轴时机器人保持不动,两者独立运动。
Q: 使用外部轴联动功能时需要注意什么?
A: 确保外部轴与机器人的运动范围没有干涉;在联动模式下,点动外部轴时要注意机器人的跟随运动,确保安全;切换模式时,建议先停止所有运动,确保系统处于稳定状态。