Appearance
变量手册
变量类型
| 变量类型 | 全局变量 | 局部变量 |
|---|---|---|
| 整型 | GINT | INT |
| 浮点型 | GDOUBLE | DOUBLE |
| 布尔型 | GBOOL | BOOL |
| 字符型 | GSTRING | STRING |
位置变量
| 变量类型 | 描述 |
|---|---|
| P | 记录机器人位置数据的局部点位变量 |
| GP | 记录机器人位置数据的全局点位变量 |
| E | 机器人在连接外部轴时,记录外部轴位置数据的局部点位变量;当设置双机模式时,记录两台机器人位置数据的局部点位变量。双机模式:"两台类型均为六轴串联多关节机器人" |
| GE | 机器人在连接外部轴时,记录外部轴位置数据的全局点位变量;当设置双机模式时,记录两台机器人位置数据的全局点位变量 |
注意事项:新建或者修改的局部点位数据只保存于当前的作业文件,全局点位的数据会一直保存。不同的作业文件可以调用相同的全局位置变量,当其中一个文件修改了全局点位,另一个作业中被调用的相同全局变量的数据也会被修改。
引用变量
位置变量引用变量
使用介绍:给 [] 里面的局部整型或全局整型变量赋值为某一个值时,局部或全局点位为该值所表示的点位。
| 格式 | 示例 |
|---|---|
| P[INT/GINT] | P[I001],当 I001=10 时,P[I001] 相当于 P0010 P[GI001],当 GI001=20 时,P[GI001] 相当于 P0020 |
| GP[INT/GINT] | GP[I002],当 I002=5 时,GP[I002] 相当于 GP0005 GP[GI002],当 GI002=10 时,GP[GI002] 相当于 GP0010 |
| E[INT/GINT] | E[I003],当 I003=8 时,E[I003] 相当于 E0008 E[GI003],当 GI003=12 时,E[GI003] 相当于 E0012 |
| GE[INT/GINT] | GE[I004],当 I004=15 时,GE[I004] 相当于 GE0015 GE[GI004],当 GI004=25 时,GE[GI004] 相当于 GE0025 |
数值变量引用变量
使用介绍:给 [] 里面的局部整型或全局整型变量赋值为某一个值时,局部或全局变量为该值所表示的变量。
| 格式 | 示例 |
|---|---|
| I[INT/GINT] | I[I002],当 I002=12 时,I[I002] 相当于 I012 I[GI002],当 GI002=22 时,I[GI002] 相当于 I022 |
| GI[INT/GINT] | GI[I003],当 I003=3 时,GI[I003] 相当于 GI003 GI[GI003],当 GI003=5 时,GI[GI003] 相当于 GI005 |
| D[INT/GINT] | D[I004],当 I004=5 时,D[I004] 相当于 D005 D[GI004],当 GI004=7 时,D[GI004] 相当于 D007 |
| GD[INT/GINT] | GD[I005],当 I005=8 时,GD[I005] 相当于 GD008 GD[GI005],当 GI005=12 时,GD[GI005] 相当于 GD012 |
| B[INT/GINT] | B[I006],当 I006=11 时,B[I006] 相当于 B011 B[GI006],当 GI006=9 时,B[GI006] 相当于 B009 |
| GB[INT/GINT] | GB[I007],当 I007=14 时,GB[I007] 相当于 GB014 GB[GI007],当 GI007=15 时,GB[GI007] 相当于 GB015 |
| S[INT/GINT] | S[I008],当 I008=23 时,S[I008] 相当于 S023 S[GI008],当 GI008=17 时,S[GI008] 相当于 S017 |
| GS[INT/GINT] | GS[I009],当 I009=45 时,GS[I009] 相当于 GS045 GS[GI009],当 GI009=21 时,GS[GI009] 相当于 GS021 |
IO 端口引用变量
| 格式 | 示例 |
|---|---|
| AIN | 根据当前所连接的 IO 板直接选择端口 |
| DIN | 根据当前所连接的 IO 板直接选择端口 |
| DOUT | 根据当前所连接的 IO 板直接选择端口 |
| AIN[INT/GINT] | AIN[I001],当 I001=1 时,AIN[I001] 相当于 AIN1-1 端口 AIN[GI001],当 GI001=2 时,AIN[GI001] 相当于 AIN1-2 端口 |
| DIN[INT/GINT] | DIN[I010],当 I010=5 时,DIN[I010] 相当于 DIN1-5 端口 DIN[GI010],当 GI010=6 时,DIN[GI010] 相当于 DIN1-6 端口 |
| DOUT[INT/GINT] | DOUT[I015],当 I015=10 时,DOUT[I015] 相当于 DOUT1-10 端口 DOUT[GI016],当 GI016=11 时,DOUT[GI016] 相当于 DOUT1-11 端口 |
注意事项:IO 端口引用变量时定义的变量值不能超过当前所连接 IO 板的端口数。
数值变量
全局数值变量
数值变量分为全局数值变量和局部数值变量。
| 变量类型 | 变量数量 | 变量示例 |
|---|---|---|
| 全局整数型 | 999 | GI001...GI999 |
| 全局浮点型 | 999 | GD001...GD999 |
| 全局布尔型 | 999 | GB001...GB999 |
| 全局字符型 | 999 | GS001...GS999 |
点击变量 - 全局数值,进入全局数值变量界面。

【修改】选中需要修改的变量名,点击"修改"然后给变量赋值、给变量添加注释。
【清除】清除变量里面存的值,点击清除后,变量值变为 0,清除按钮只会清除当前界面的值。
【取消】对选中的变量不进行任何操作。
【保存】保存修改后的变量值。
【返回】返回到变量界面。
如何给全局数值变量赋值?
手动赋值
- 在全局数值变量选中需要修改的变量,点击"修改"然后输入数值。
- 点击"保存"变量赋值成功。

指令赋值
- 新建工程,打开工程文件。
- 插入指令,指令类型选择变量类,选择赋值指令。
- 点击【确定】进入指令参数设置界面,选择变量类型和填入变量值。
- 点击【确定】赋值指令插入成功,如果需要给多个不同的变量赋值,重复前面的步骤即可。
- 指令执行完后,可以在监控 - 数值变量界面或者全局数值变量界面查看变量值。
全局数值变量类型
全局整数型
| 项目 | 说明 |
|---|---|
| 格式 | GINT |
| 范围 | 【1,999】 |
| 变量 | 变量的编号 |
| 数值 | 变量的值,整数型变量的范围为整数 |
| 注释 | 用户可以给变量添加注释,方便用户标记该变量的作用 |
全局浮点型
| 项目 | 说明 |
|---|---|
| 格式 | GDOUBLE |
| 范围 | 【1,999】 |
| 变量 | 变量的编号 |
| 数值 | 变量的值,浮点型变量的范围为实数 |
| 注释 | 用户可以给变量添加注释,方便用户标记该变量的作用 |
全局布尔型
| 项目 | 说明 |
|---|---|
| 格式 | GBOOL |
| 范围 | 【1,999】 |
| 变量 | 变量的编号 |
| 数值 | 该变量的值,布尔型变量的范围为 0/1 |
| 注释 | 用户可以给变量添加注释,方便用户标记该变量的作用 |
全局字符型
| 项目 | 说明 |
|---|---|
| 格式 | GSTRING |
| 范围 | 【1,999】 |
| 变量 | 变量的编号 |
| 数值 | 全局字符型可以保存数字、符号、字母(包含大小写)、汉字 |
| 注释 | 用户可以给变量添加注释,方便用户标记该变量的作用 |
局部数值变量
| 变量类型 | 数值类型 | 变量数量 | 变量示例 |
|---|---|---|---|
| 局部整数型 | INT | 999 | I001...I999 |
| 局部浮点型 | DOUBLE | 999 | D001...D999 |
| 局部布尔型 | BOOL | 999 | B001...B999 |
| 局部字符型 | STRING | 999 | S001...S999 |
说明:
- 局部数值变量赋值的值只作用于当前程序。 例如:新建程序 A 和程序 B,程序 A 里面赋值 I001=10,然后打开程序 B,在变量界面查看 I001 的值,变量界面显示 I001=0。
- 定义的所有局部数值变量一般只能用于当前程序,其他程序、后台程序都无法使用。
注:若使用指令调用后台子程序时,声明局部数值变量参数即可在主程序中使用。
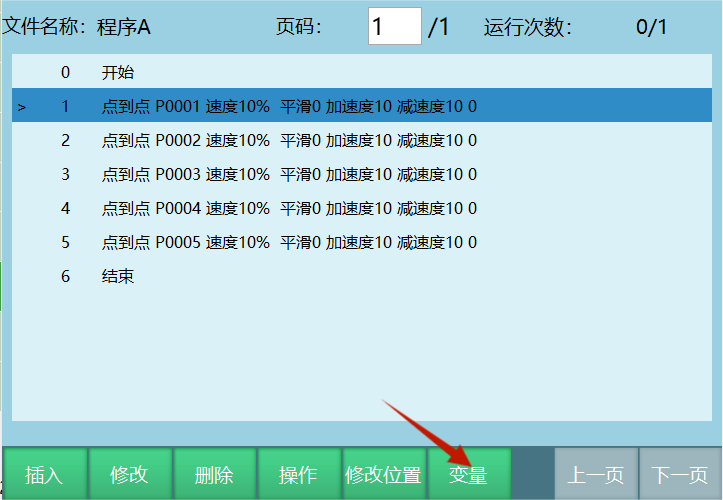
定义局部变量需要在打开的程序界面点击【变量】,进入局部变量参数设置界面。



【修改】修改选中编号的变量值。
【保存】给目标变量修改值后,点击保存,变量值修改成功。
【取消】对选中变量不进行任何操作。
【返回】点击返回按钮,返回到程序界面。
填入数值,点击小键盘上的确定,可以直接定位到对应变量,例如填写 9,会直接定位到 I009。
如何给局部数值变量赋值
手动赋值
- 在程序 - 变量 - 局部变量界面,点击【修改】给需要赋值的变量输入数值。
- 点击【保存】,变量修改成功。

注意事项:通过手动给变量赋的值我们认为是这个变量的初始数值,通过指令给变量赋的值不会修改初始数值,局部变量界面变量值的显示是一直不变的,除非用户再次手动修改了初始值。
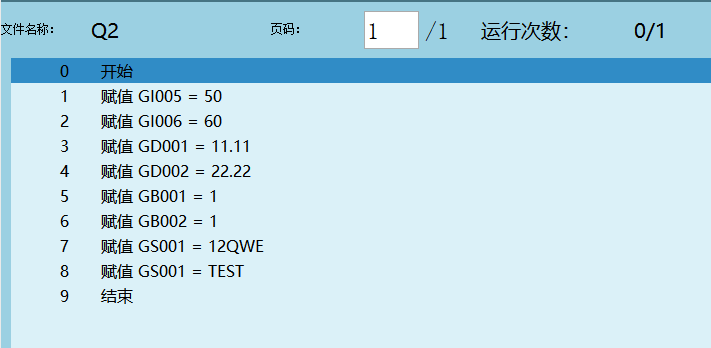
例如:我们通过指令给 D001 赋值为 22.22,指令运行结束后在此界面查看 D001=11.11。
指令赋值
- 新建工程,打开工程文件。
- 插入指令,指令类型选择变量类,选择赋值指令。
- 点击【确定】进入指令参数设置界面,选择变量类型和填入变量值。
- 点击【确定】赋值指令插入成功,如果需要给多个不同的变量赋值,重复前面的步骤即可。
- 在指令执行时,可以在监控 - 数值变量界面监控变量数值的变化。

数值变量的使用
数值变量应用在不同的工艺、功能和指令等。
- 工艺使用:码垛工艺里面通过变量来记录码垛的层数、码垛的数目和当前层码垛数目。

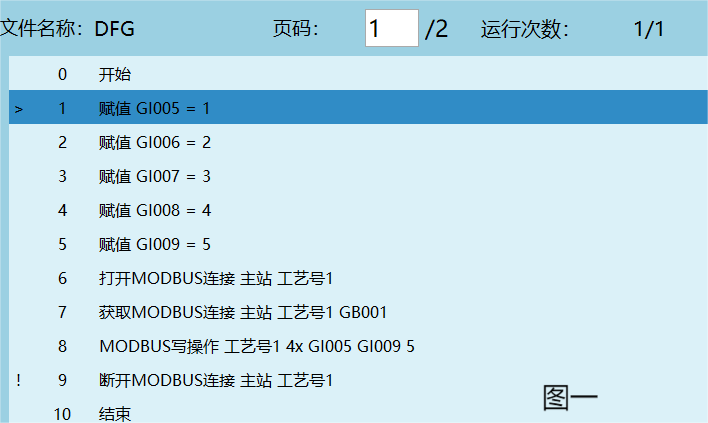
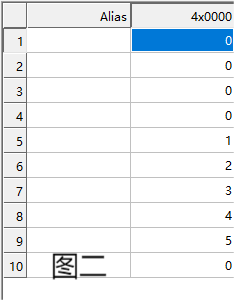
- Modbus 主站功能:通讯成功后,插入 Modbus 类指令,给变量赋值,执行 Modbus 写指令会把赋值得变量值写入进去。
- 指令使用:
- 计时指令通过绑定变量计时。
- 条件判断指令通过变量作为判断的条件。
- 位置变量类指令点位的加、减、改可以通过给变量赋值的形式对点位进行修改,运动控制类、程序控制类等指令类型都会用到绑定变量功能。
数值变量的应用示例
条件类指令应用
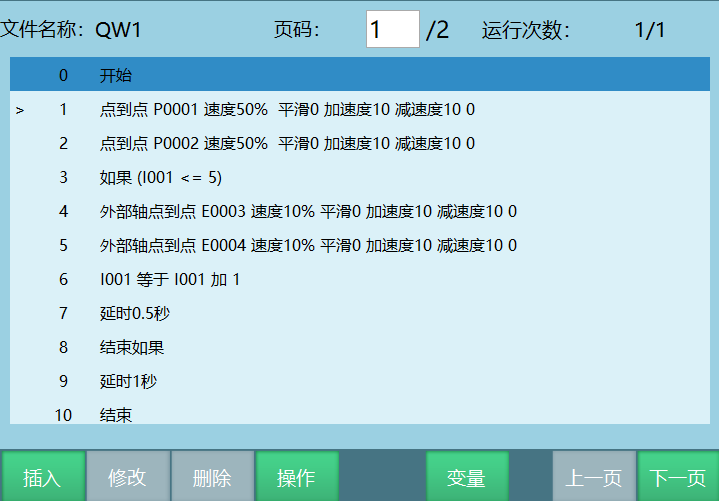
例如:插入 IF 指令,判断条件是当 I001<=5 时执行 IF 语句里面的指令,当 I001>5 时,退出 IF 语句执行 ENDIF 后面的指令。
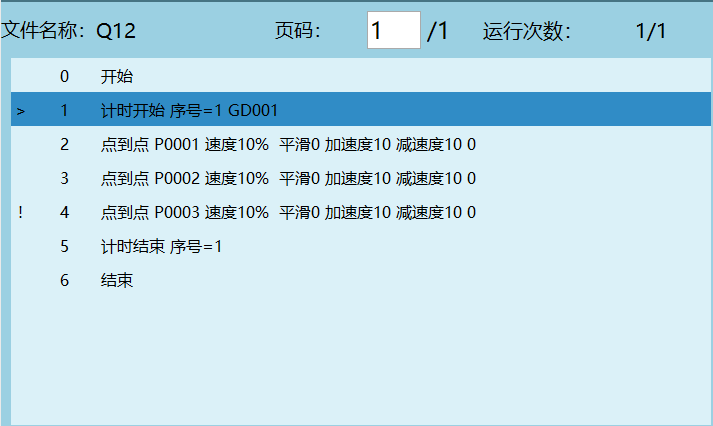
计时指令应用
程序在运行的时候,可以通过计时指令把程序运行的时间存入到变量。

位置变量
全局位置变量
| 类型 | 数量 | 示例 |
|---|---|---|
| GP:记录机器人位置数据的变量 | 9999 | GP0001...GP9999 |
| GE:双机模式时记录两台机器人位置数据的变量 | 9999 | GE0001...GE9999 |
| 带外部轴时记录外部轴点位的位置变量 | 9999 | GE0001...GE9999 |
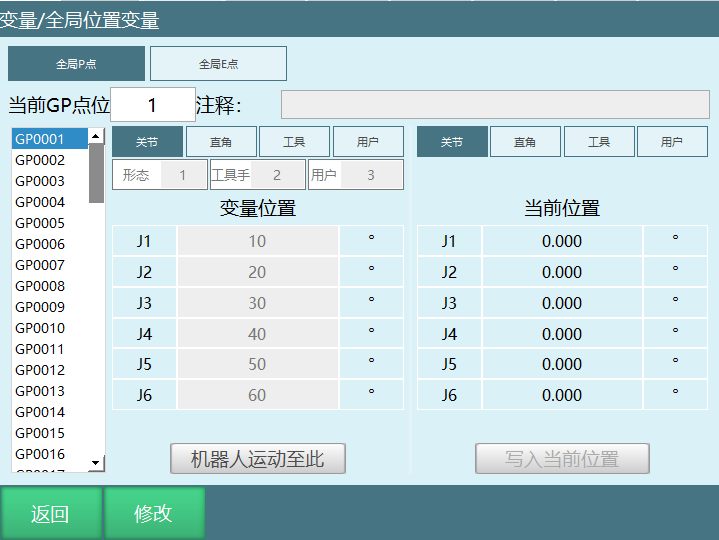
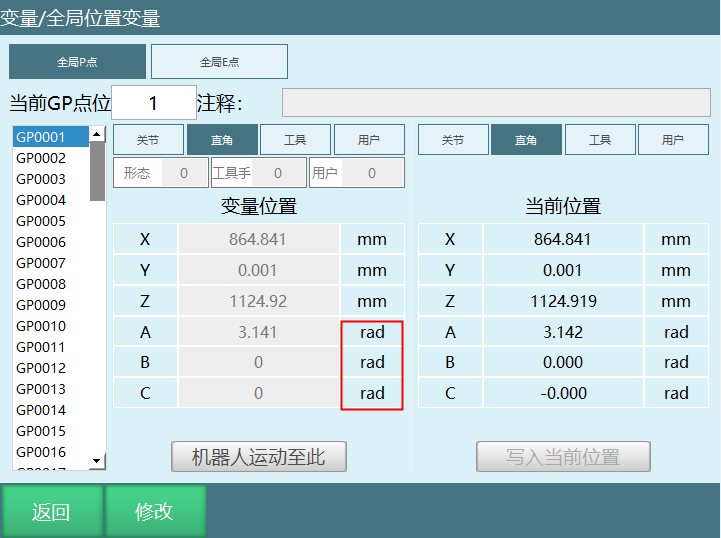
点击变量 - 全局位置,进入全局位置界面。

- 【修改】手动修改目标变量的点位,点击修改,填入参数后点击小键盘上的确定。
- 【保存】修改完点位后,点击保存,点位修改成功。
- 【清除】清除目标变量的点位信息,点击保存后点位数据清除成功。
- 【取消】取消对目标变量的修改和清除操作。
- 【返回】返回到变量界面。
- 当前 GP 点位 / 当前 GE 点位:填写数值后点击小键盘上的确定,会直接定位到对应的变量,如果输入 100,会直接定位到 GP0100。
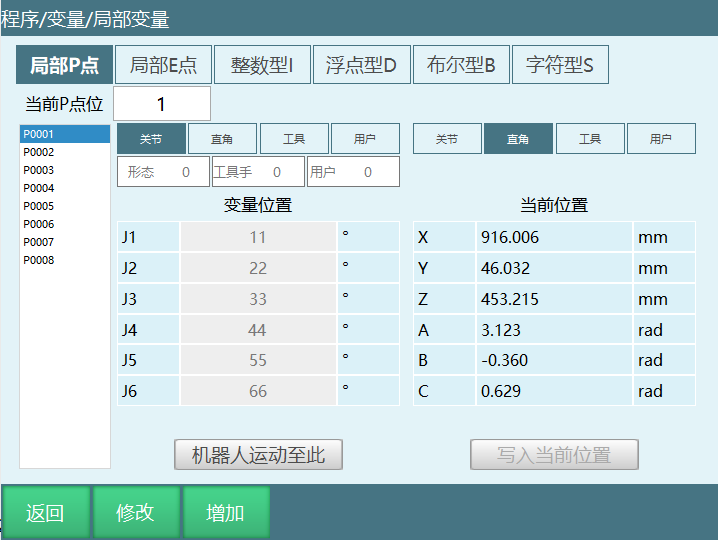
- 注释:变量添加注释说明,方便用户知道每个位置变量所代表的意思。
- 变量位置:可以将机器人不同位置的点位信息存入到选择的变量,当带有外部轴时,也会记录外部轴的位置信息。此参数可以手动修改。
- 当前位置:机器人当前的位置信息,当带有外部轴时,也会记录外部轴当前的位置信息。此参数不能修改。
- 机器人运动至此:在示教模式下上使能,然后点击运动至此,机器人运动到目标点位。
- 写入当前位置:点击修改,再点击写入当前位置,会把机器人当前的点位信息写入到选择的变量。如果要将机器人当前关节坐标下的点位写入到变量,需要选中关节,然后再点击写入当前位置;如果要将机器人当前直角坐标下的点位写入到变量,需要选中直角,然后再点击写入当前位置,点击保存,写入位置成功。

全局位置变量修改
手动修改
- 点击【修改】,选中需要修改的变量,然后在变量位置给每一个轴赋值,如果需要修改形态、工具手、用户这些参数信息时,在对应的输入框填入合理的参数值。
- 点击【保存】变量位置信息修改成功。
写入机器人当前位置修改
- 示教模式下点动机器人,让机器人运动到目标位置后,点击【修改】。
- 点击写入当前位置。
- 点击【保存】目标变量修改成功。
目标点位说明
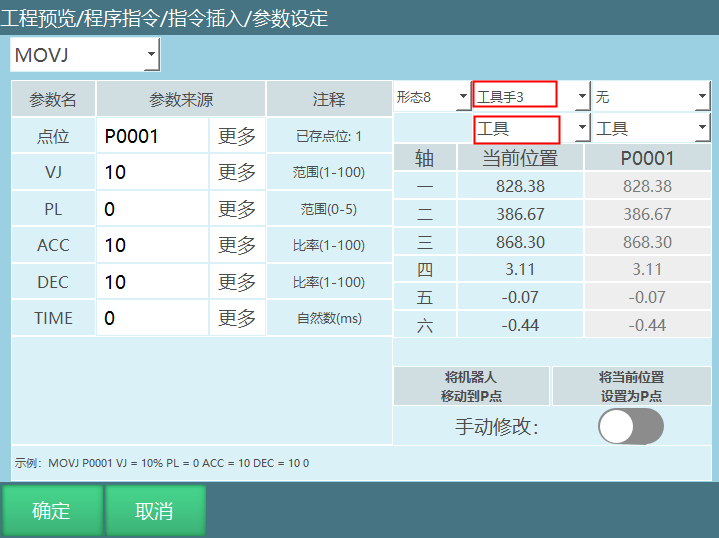
参数界面修改全局GP点

当前位置修改为目标点位:
- 插入运动类指令点位选择 GP 变量。
- 移动机器人到目标变量位置后,点击【将当前位置设置为 GP 点】会将机器人当前坐标下的位置写入变量。
- 提示框弹出"是否继续修改点位",点击【确定】将当前位置存入目标变量,点击【取消】不会记录机器人当前点位到目标变量,可以继续移动机器人到想要的点位。参数界面"当前位置"在移动机器人时坐标是一直变化的。
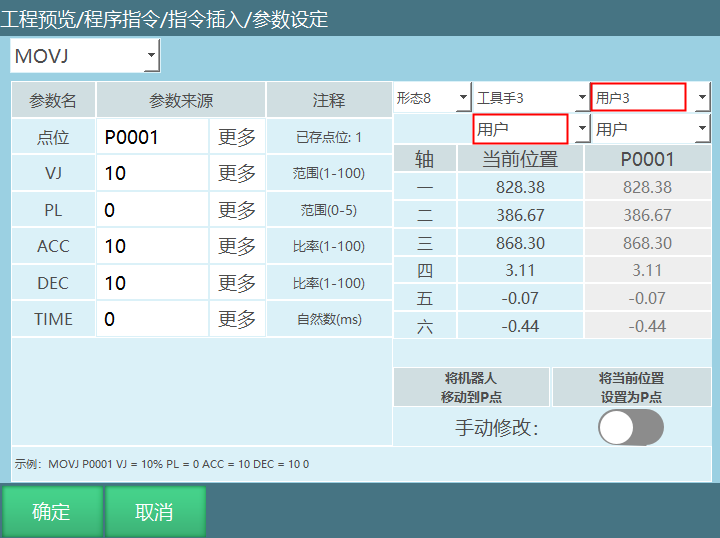
手动位置设置目标点位(必须打开手动修改按钮,这样目标点位才会修改成功):
- 插入一条运动类指令,点位类型选择全局 GP 点。
- 在参数设定界面,点击【将手动位置设为 GP 点】,修改目标变量坐标轴的点位,填入需要的坐标值,提示框弹出"是否继续修改点位",点击【确定】将修改后的点位位置存入目标变量。点击【取消】可以继续修改目标轴的点位。
注意事项:
- 全局位置变量在不同的作业文件里面是可以直接被调用的。
- 全局位置变量界面修改的 GP 点点位信息和参数设定界面修改的全局 GP 点点位信息是同步的。
- 如果程序 A 里面插入了 GP0001 和 GP0002,程序 B 里面也插入了 GP0001 和 GP0002,那么这两个程序里面 GP0001 和 GP0002 的点位是相同的。如果修改了程序 A 里面的两个点位,程序 B 里面的点位也会被修改,会造成程序 B 在运行的时候出现问题。
- 不同作业文件建议不要调用相同的全局 GP 点,否则其中一个作业文件如果修改了全局点位信息,其他作业文件中被调用的相同的全局 GP 点也会被修改,会造成其他作业文件在运行的时候出现问题。
局部位置变量
| 类型 | 数量 | 示例 |
|---|---|---|
| P:记录机器人位置数据的变量 | 9999 | P0001...P9999 |
| E:双机模式时记录两台机器人位置数据的变量 | 9999 | E0001...E9999 |
| 带外部轴时记录外部轴点位的位置变量 | 9999 | E0001...E9999 |
点击【工程】- 选择【程序】- 在程序界面点击【变量】,进入局部位置变量界面。
说明:局部位置变量 P 仅能用于单独的一个作业文件,不能在所有的作业文件之间调用。

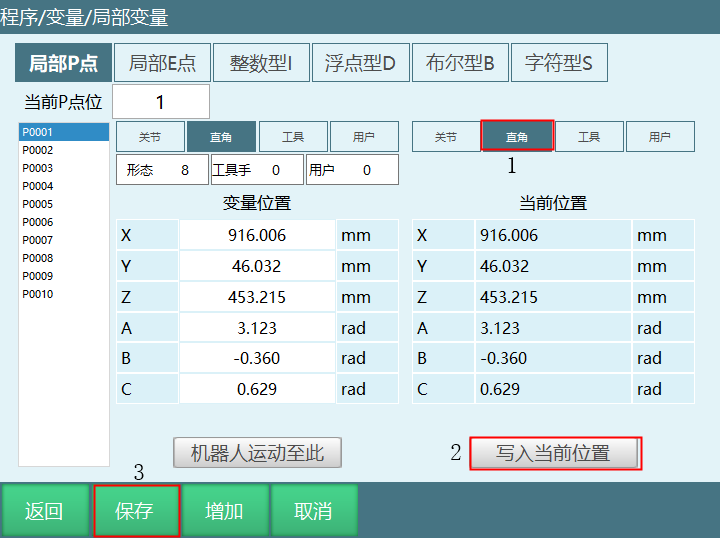
图例中按钮说明:
- 【修改】手动修改目标变量的点位,点击修改,填入参数后点击小键盘上的确定。
- 【返回】返回到程序指令界面。
- 【保存】修改完点位后点击保存,点位修改成功。
- 【增加】选中局部 P 点,点击增加会新建一个新的 P 点;选中局部 E 点,点击增加会新建一个新的 E 点。例如:现在局部 P 点的点位个数是在 P0006,点击增加,点位个数会变到 P0007。
- 【取消】原有变量的点位信息不进行任何修改。
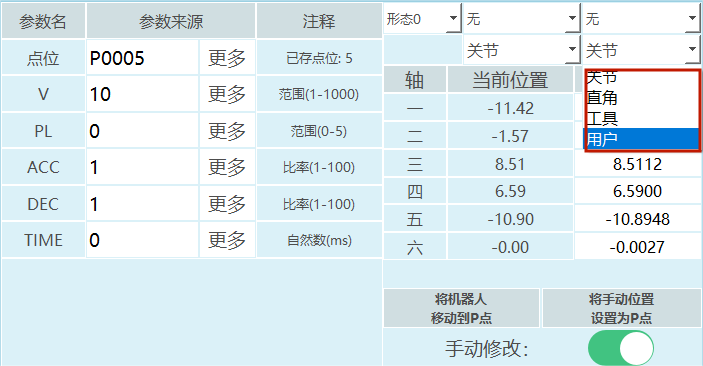
- 当前 P 点位 / 当前 E 点位:填写数值后点击小键盘上的确定,会直接定位到对应的变量,例如输入 5,会直接定位到 P0005。
- 变量位置:可以将机器人不同位置的点位信息存入到选择的变量,当带有外部轴时,也会记录外部轴的位置信息。此参数可以手动修改。
- 当前位置:机器人当前的位置信息,当带有外部轴时,也会记录外部轴当前的位置信息。此参数不能修改。
- 机器人运动至此:在示教模式下上使能,然后点击运动至此,机器人运动到目标点位。
- 写入当前位置:点击修改,再点击写入当前位置,会把机器人当前的点位信息写入到选择的变量。如果要将机器人当前关节坐标下的点位写入到变量,需要选中关节,然后再点击写入当前位置;如果要将机器人当前直角坐标下的点位写入到变量,需要选中直角,然后再点击写入当前位置,点击保存,写入位置成功。
局部位置变量修改
手动修改
- 点击【修改】,选中需要修改的变量,然后在变量位置给每一个坐标轴赋值;如果需要修改形态、工具手、用户这些参数信息时,在对应的输入框填入合理的参数值。
- 点击【保存】变量位置信息修改成功。
指令局部变量
对局部指令进行加、减、改操作
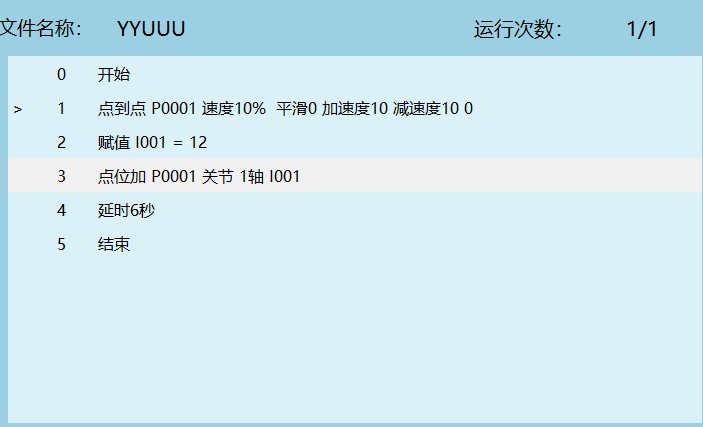
程序说明:
假设 P0001关节坐标(3.6847 ,0 ,0 ,0 ,0 ,0)
程序运行到第三行时P001在监控-位置变量-关节坐标显示为(35.6847 ,0,0, 0, 0, 0)
程序运行结束后上使能P001关节坐标(3.6847, 0, 0 ,0 ,0, 0)
说明:程序说明第1条的P001的点位我们可以认为是目标点位的初始点位,通过加减对目标点位进行修改的值可以理解为附加值。例如:对P001关节J1Z轴加的32为附加值
程序运行结束后,P0001点位坐标为初点位的坐标。
如图所示,现在有3条指令,未设置局部变量,当程序开始运行。
开始走第一条指令:点击监控-位置变量,位置变量显示P001点位的坐标值。
P0001初始点位

P001:初始点位+附加值点位坐标显示

程序运行结束后P001点位坐标显示

注意:全局点位(GP)如果和上图插入一样的指令,对目标点位进行加、减、改操作,目标点位会变为加、减、改之后的点位。
写入机器人当前位置修改
- 示教模式下点动机器人,让机器人运动到目标位置后,点击【修改】。
- 点击写入当前位置。
- 点击【保存】目标变量修改成功。
参数界面修改局部 P 点

当前位置修改为目标点位:
- 插入指令后选择目标变量。
- 在参数设定界面,移动机器人到目标变量位置后,点击【将当前位置设置为 P 点】会将机器人当前坐标下的位置写入变量。
- 提示框弹出"是否继续修改点位",点击【确定】将当前位置存入目标变量,点击【取消】不会记录机器人当前点位到目标变量,可以继续移动机器人到想要的点位。
手动位置设置目标点位(必须打开手动修改按钮):
- 插入一条运动类指令,点位类型选择 P 点。
- 在参数设定界面,点击【将手动位置设为 P 点】,修改目标变量坐标轴的点位,填入需要的坐标值,提示框弹出"是否继续修改点位",点击【确定】将修改后的点位位置存入目标变量。点击【取消】可以继续修改目标轴的点位。
注意事项:
- 局部位置变量界面的点位信息和参数设定界面的点位信息是同步的。
- 插入运动类指令后点位如果选择新建的话会新建一个 P 点(点位直接选择新建的话是无法修改点位信息的,必须在参数设定界面点击【确定】然后在程序指令界面点击【修改】就可以修改点位信息了)。如果直接选择 P 的话,要在已存在点位数量的区间内选择需要修改位置的 P 点。
- 定义的局部变量只对当前的作业文件生效。 例如:程序 A 和程序 B 里面都定义了 P0001,如果修改了程序 A 里面 P0001 的点位,程序 B 里面 P0001 的点位是不会被修改的。
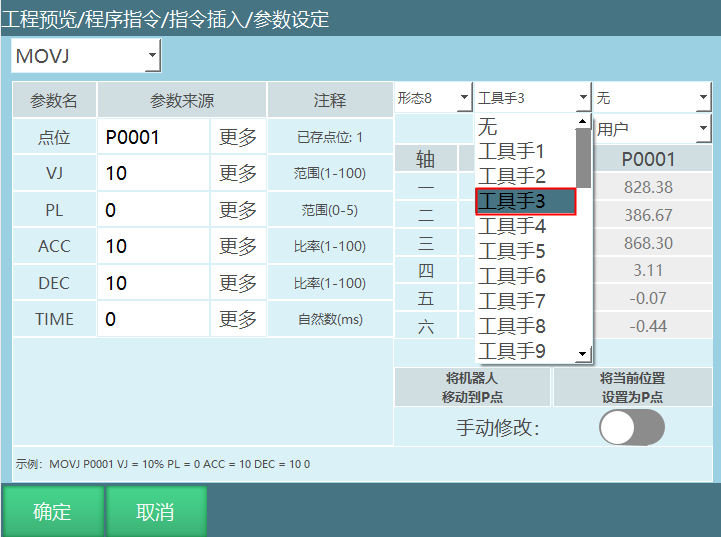
点位形态、工具手、用户值修改方式
设置 - 操作参数界面增加点位形态、工具手、用户值设置方式,有自动和手动两种方式,默认为自动。
自动
新建点位时形态、工具手、用户坐标默认取当前值。
修改工具手需要将当前位置选为工具,点击【将当前位置设置为 P 点】,工具手修改成功。
修改用户坐标:将当前位置选为用户,点击【将当前位置设置为 P 点】用户坐标修改成功。
形态值:无法修改,自动获取。
手动
手动设置形态、工具手、用户坐标。
- 新建点位:可以直接修改形态、工具手、用户坐标。 修改工具手:选中需要修改的工具手,点击【将当前位置设置为 P 点】,点击提示框界面的【确定】工具手修改成功。 修改用户坐标和形态的方法和修改工具手一样。 点击【将当前位置设置为 P/GP 时】不改变当前点位已有形态、工具手、用户值。
- 指令 - 位置变量类 - 设置点位信息,可以改坐标系、形态等。
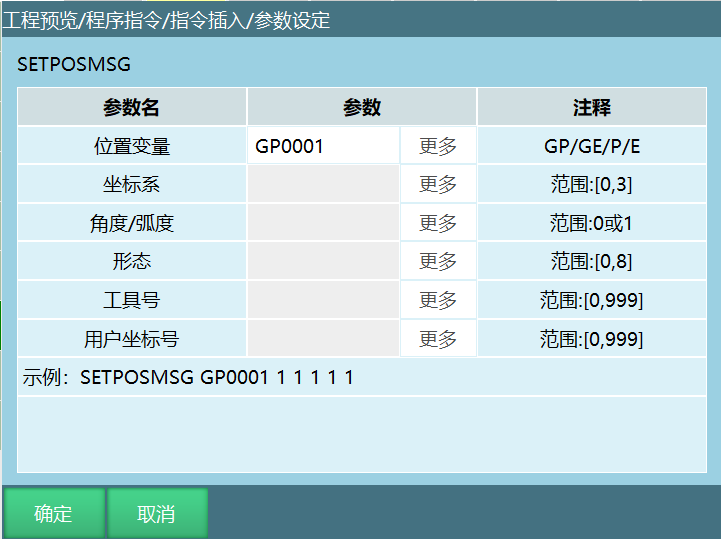
- 位置变量:选择想要修改的点位 GP/GE/P/E,只能选择已有的点位。
- 坐标系:范围【0,3】;0:关节坐标系;1:直角坐标系;2:工具坐标系;3:用户坐标系。
- 角度/弧度:可选值 0/1。
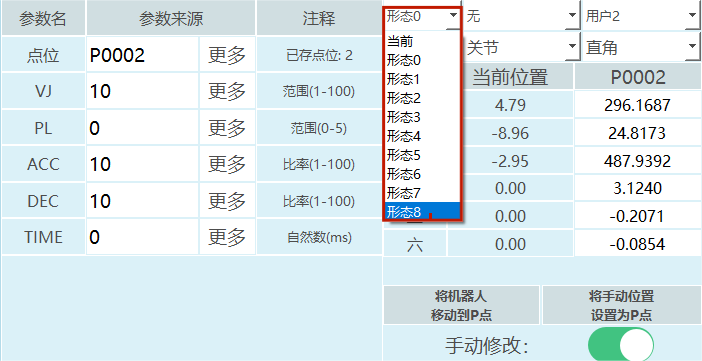
- 形态:范围【0,8】。
- 工具号:工具手号【0,999】。
- 用户坐标号:用户坐标系【0,999】。 点击确定,运行程序即可修改。
位置变量点位信息
点位坐标系
范围【0,3】:0 为关节坐标,1 为直角坐标,2 为工具坐标,3 为用户坐标。
如何修改位置变量的坐标系?
- 全局 GP 点可以点击变量 - 全局位置,进入全局位置变量界面点击修改,选择坐标系,点击保存,坐标系修改成功。
- 局部 P 点可以在程序指令界面点击变量,进入局部位置变量界面点击修改,选择坐标系,点击保存,坐标系修改成功。
- 程序指令界面选中需要修改的全局 GP 点、局部 P 点,点击修改,进入参数设定界面,打开手动修改按钮选择坐标系后点击确定,坐标修改成功。
形态
范围:【0,8】。
- 机型为 6 轴串联多关节机器人有形态参数,如形态参数选择当前,则控制系统自动通过转换方式计算出机器人当前的形态值。形态值是通过机器人 1、3、5 轴的关节点位来计算的,如果范围在 [-90, +90] 之间则为 1,否则为 0。
- 形态值为机器人 1 轴、3 轴、5 轴位置的二进制转换为十进制然后再加 1。 例如:某个六轴机器人 1 轴为 59 度、2 轴为 69 度、3 轴为 79 度、4 轴为 89 度、5 轴为 99 度、6 轴为 109 度。 结果:二进制数 110 = 十进制 6,形态值为 6+1=7。
| 轴 | 1轴 | 3轴 | 5轴 |
|---|---|---|---|
| 二进制数值 | 1 | 1 | 0 |
- 机型为四轴 SCARA 机器人时有左右手参数。
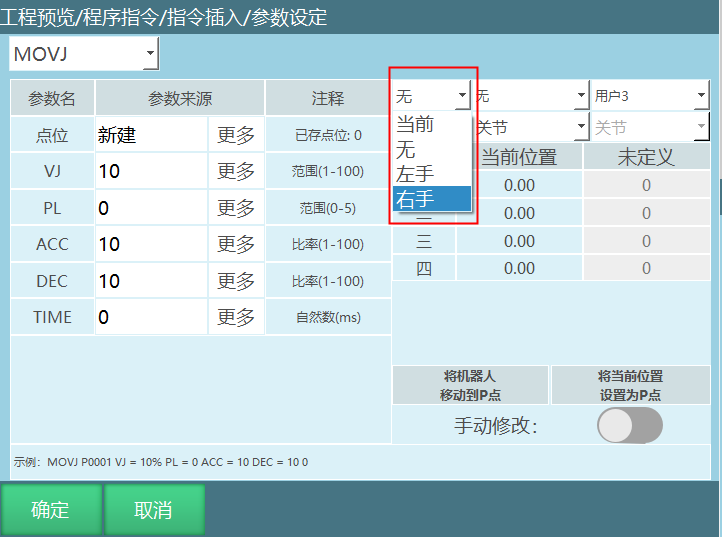
如何修改位置变量形态?
- 全局 GP 点:点击变量 - 全局位置,进入全局位置变量界面点击修改,在形态栏输入形态值,点击保存。
- 局部 P 点:在程序指令界面点击变量,进入局部位置变量界面点击修改,在形态栏输入形态值,点击保存。
- 程序指令界面:选中需要修改的全局 GP 点、局部 P 点,点击修改,进入参数设定界面,打开手动修改按钮选择形态后点击确定。左右手参数的修改方法相同。
工具手
范围【0,999】。
如何修改位置变量的工具号?
- 全局 GP 点:点击变量 - 全局位置,进入全局位置变量界面点击修改,在工具手栏输入工具手号,点击保存,工具手参数修改成功。
- 局部 P 点:在程序指令界面点击变量,进入局部位置变量界面点击修改,在工具手栏输入工具手号,点击保存,工具手修改成功。
- 程序指令界面:选中需要修改的全局 GP 点、局部 P 点,点击修改,进入参数设定界面,打开手动修改按钮选择工具手,点击确定,工具手修改成功。
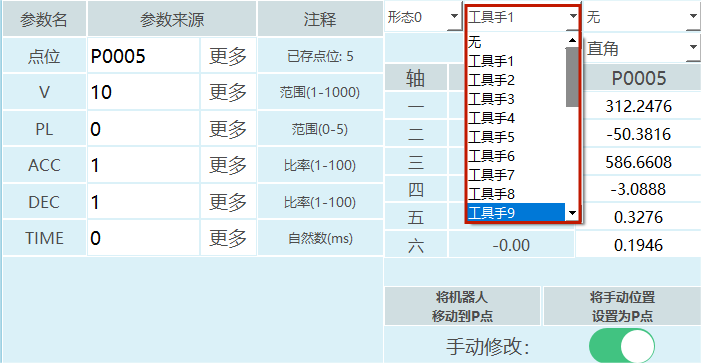
注意事项:当目标点位的坐标为直角、工具或者用户坐标时,如果想要将目标点位绑定工具手,则选择对应的工具手,不绑定选择无。若运动时实际工具手和点位绑定工具手不同,则程序运行时出错。
例如:目标点位绑定工具手 2,实际使用工具手 1,运行指令时控制器报错(机器人 1 工具坐标使用错误,点位工具为 1,实际使用工具 2)。
用户坐标
范围【0,999】。
如何修改目标点位的用户坐标号?
- 全局 GP 点:点击变量 - 全局位置,进入全局位置变量界面点击修改,在用户栏输入用户坐标号,点击保存,用户坐标号修改成功。
- 局部 P 点:在程序指令界面点击变量,进入局部位置变量界面点击修改,用户栏输入用户坐标号,点击保存,用户坐标号修改成功。
- 程序指令界面:选中需要修改的全局 GP 点、局部 P 点,点击修改,进入参数设定界面,打开手动修改按钮选择用户后点击确定,用户坐标号修改成功。
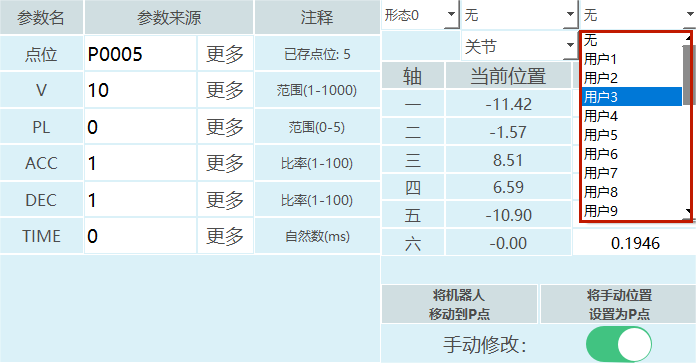
注意事项:当目标点位的坐标为用户坐标时,如果想要将目标点位绑定用户坐标,则选择对应的用户编号,不绑定选择无。若运动时实际用户和点位绑定用户不同,则程序运行时出错。
例如:目标点位绑定用户 1,实际使用用户 2,运行指令时控制器报错(机器人用户坐标使用错误,点位用户为 1,实际用户 2)。
角度/弧度
机器人在直角坐标、工具坐标、用户坐标下有姿态轴 A、B、C,姿态轴的姿态值是可以手动修改的。
如何修改角度/弧度?
点击设置 - 操作参数,进入操作参数界面,点击修改,在姿态值列设置角度制和弧度制。
例如:修改姿态值为角度值后,在直角坐标、工具坐标、用户坐标下 A、B、C 轴的单位变为角度制(°);修改为弧度值后,A、B、C 轴的单位变为弧度(rad)。
局部 P 点点位信息说明
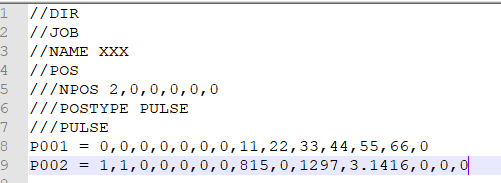
例如:P0002 = 1,1,0,0,0,0,0,815,0,1297,3.1416,0,0,0。
点位数据分解如下:
| P0002 | 点位参数 | 参数说明 |
|---|---|---|
| 1 | 坐标系 | 0:关节 1:直角 2:工具 3:用户 |
| 1 | 角度/弧度 | 0:角度(关节点)1:弧度(直角点、工具点、用户点) |
| 0 | 形态/左右手 | 六轴时为形态参数,四轴 SCARA 时为左右手参数 |
| 0 | 工具 | 工具手编号 |
| 0 | 用户 | 用户坐标编号 |
| 0 | 预留 | 预留 |
| 0 | 预留 | 预留 |
| 815 | 1轴 | 点位 1 轴坐标 |
| 0 | 2轴 | 点位 2 轴坐标 |
| 1297 | 3轴 | 点位 3 轴坐标 |
| 3.1416 | 4轴 | 点位 4 轴坐标 |
| 0 | 5轴 | 点位 5 轴坐标 |
| 0 | 6轴 | 点位 6 轴坐标 |
| 0 | 7轴 | 点位 7 轴坐标 |
局部 E 点点位信息说明
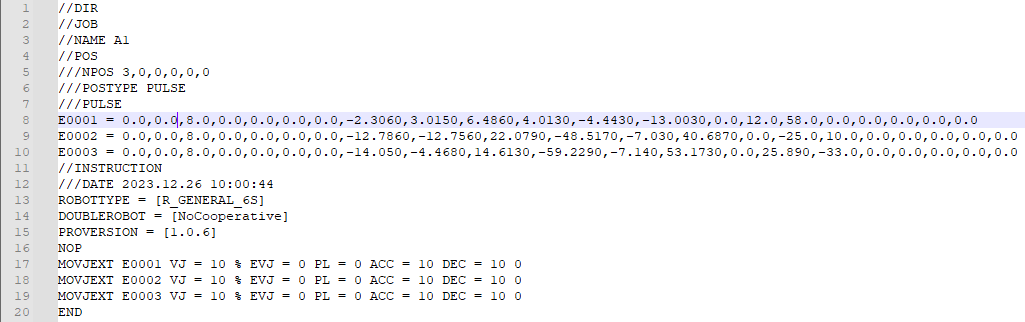
例如:E0001 点位数据分解如下:
| E0001 | 点位参数 | 参数说明 |
|---|---|---|
| 0 | 坐标系 | 0:关节 1:直角 2:工具 3:用户 |
| 0 | 角度/弧度 | 0:角度(关节点)1:弧度(直角点、工具点、用户点) |
| 8 | 形态/左右手 | 六轴时为形态参数,四轴 SCARA 时为左右手参数 |
| 0 | 工具 | 工具手编号 |
| 0 | 用户 | 用户坐标编号 |
| 0 | 预留 | 预留 |
| 0 | 预留 | 预留 |
| -2.3060 | 1轴 | 点位 1 轴坐标 |
| 3.0150 | 2轴 | 点位 2 轴坐标 |
| 6.4860 | 3轴 | 点位 3 轴坐标 |
| 4.0130 | 4轴 | 点位 4 轴坐标 |
| -4.4430 | 5轴 | 点位 5 轴坐标 |
| -13.0030 | 6轴 | 点位 6 轴坐标 |
| 0 | 7轴 | 点位 7 轴坐标 |
| 12.0 | O1 | 点位 O1 轴坐标 |
| 58.0 | O2 | 点位 O2 轴坐标 |
| 0 | O3 | 点位 O3 轴坐标 |
| 0 | O4 | 点位 O4 轴坐标 |
| 0 | O5 | 点位 O5 轴坐标 |
变量类指令
"√"表示支持此条指令。
| 指令类型 | 前台 | 全局后台 | 局部后台 |
|---|---|---|---|
| 赋值 | √ | √ | √ |
| 写入文件 | √ | √ | √ |
SET-赋值
格式:SET【变量名】I001【选择的目标变量】3【赋值的数值】。
功能:给定义的整型、浮点型、布尔型和字符串变量赋值。
参数:引用变量的详细介绍可以在引用变量章节查看。
| 参数 | 参数说明 |
|---|---|
| 变量 | 点击更多可以选择需要的变量类型(整型,浮点型,布尔型和字符串型) |
| 变量值 | 给上面的变量赋值,可以手填或者选择变量表示 |
示例:
NOP
SET I001=12
SET D001=12.21
SET GI012=100
SET GI[GI012]=999
END
示例说明:程序第1、2行是直接给选择的变量赋值,第4、5行是通过变量形式赋值,程序运行结束后I001=12,D001=12.21,GI100=999。
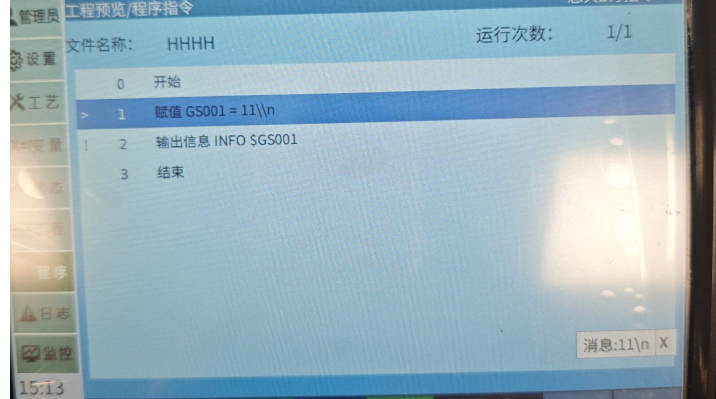
如果SET字符串类型时,字符串中有转义字符,如果想避免转义字符对字符串的影响,可在转义字符之前加"\";字符串类中也有类似问题。
示例:
SET GS001=11\n:此处输出"\n"被作为转义字符
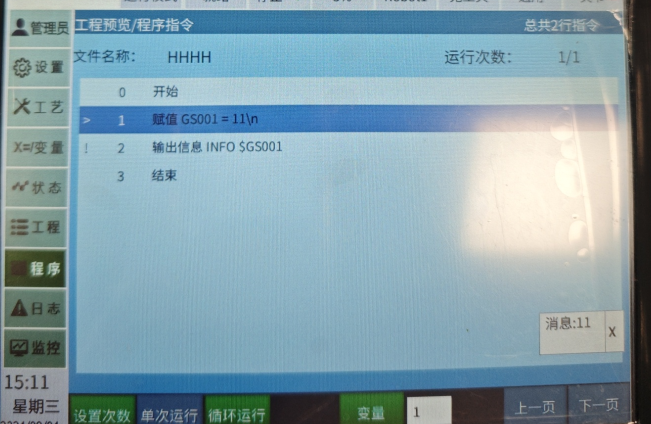
可修改为:SET GS001=11\\n:此时可以正常打印
FORCESET-写入文件
格式:FORCESET【指令名】GI001【写入文件的变量名】。
功能:将缓存的数据存入硬盘。
在程序运行过程中,所有的计算、赋值操作均是对缓存中的数值进行更改的,并不会存入系统文件中。若要强制将内存中的全局数值变量写入文件中,则可以使用FORCESET指令。
参数:
| 参数 | 参数说明 |
|---|---|
| 变量名 | 点击更多选择要强制写入文件的变量名 |
示例:
NOP
GI001=10
FORCESET GI001
END
AI 检索专用问答对 (Q&A for Retrieval)
Q:全局变量和局部变量有什么区别?
A:全局变量(如 GINT、GP)在所有作业文件中均可调用和共享,修改后会影响所有调用该变量的程序。局部变量(如 INT、P)仅对当前作业文件生效,不同作业文件之间互不影响。
Q:如何给全局数值变量赋值?
A:两种方式。手动赋值:在全局数值变量界面选中变量,点击"修改"输入数值,点击"保存"。指令赋值:插入变量类赋值指令,选择变量类型和填入变量值,执行后可在监控界面查看变量值。
Q:局部位置变量 P 和全局位置变量 GP 有什么区别?
A:局部位置变量 P 仅能用于当前作业文件,不能跨文件调用。全局位置变量 GP 在不同作业文件之间可以直接调用,但需要注意:当一个作业文件修改了某个 GP 点位,其他作业文件中调用的相同 GP 点位也会被修改,可能影响程序运行。
Q:什么是引用变量?如何使用?
A:引用变量是通过整型变量动态索引其他变量的方式。例如 P[I001] 表示当 I001=10 时,等同于 P0010。这使得程序可以通过修改变量 I001 的值来动态选择不同的位置变量。
Q:形态值是如何计算的?
A:对于六轴串联多关节机器人,形态值由 1、3、5 轴位置的二进制转换为十进制再加 1。例如 1 轴、3 轴、5 轴的二进制分别为 1、1、0,则形态值为 (110)_2 + 1 = 7。对于四轴 SCARA 机器人,形态参数对应左右手选择。
Q:工具手和用户坐标绑定有什么注意事项?
A:当目标点位的坐标为直角坐标、工具坐标或用户坐标时,如果想要将目标点位绑定工具手,则应选择对应的工具手编号,不绑定则选择"无"。运动时实际工具手和点位绑定工具手必须一致,否则控制器会报错。
版本历史
| 版本 | 日期 | 变更内容 | 作者 |
|---|---|---|---|
| 1.0.0 | 2026-04-16 | 初始版本 | MUZI165 |