Appearance
门型指令使用文档
环境
scara机器人,标准门型运动轨迹参数:
- 高度 :25mm(在Z轴方向的位移距离)
- 宽度 :300mm
位置
指令->运动控制类 -> 门型运动
参数
详细参数见下方图示:
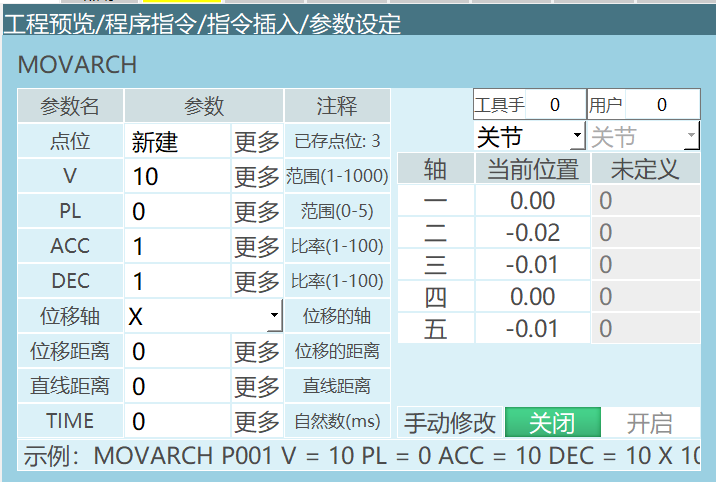
| 按参数名 | 描述说明 |
|---|---|
| P/G | 使用局部位置变量(P)或全局位置变量(G)。当值为“新建”时,插入该指令则新建一个P变量,并将机器人的当前位置记录到该P变量。 |
| V | 运动速度,范围1-1000(默认笛卡尔参数最大速度为1000,范围根据实际填写的笛卡尔参数变化),单位为mm/s。 |
| PL | 平滑过渡等级,范围0-5。 |
| ACC | 加速度比率,范围1-100,单位为百分比。 |
| DEC | 减速度比率,范围1-100,单位为百分比。 |
| 位移轴 | (X,Y,Z)门型运动时进行位移的轴,标准门型运动位移的是Z轴方向。 |
| 位移距离 | 需要在位移轴上位移的距离,标准门型运动是在Z轴上位移25mm。 |
| TIME | 时间,范围非负整数,单位ms。提前时间执行下一条指令。 |
注意,当修改直线指令的速度时,加减速度以及加减速度会与速度成1:10的倍数关系自动显示,如需修改加减速度以及加减速度,可手动操作。
使用方法
- 新建一个工程文件,然后点击打开>插入>运动控制类>门型运动。
- 示例:
MOVARCH P0001 V=100mm/s PL=5 ACC=10 DEC=10 Z 25 0
- 说明:
门型支持单步和试运行;
门型指令新建直线距离。
- 门型轨迹图示
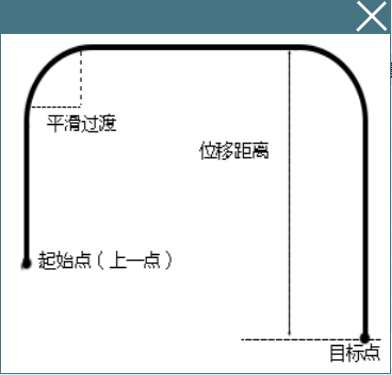
参数介绍:+

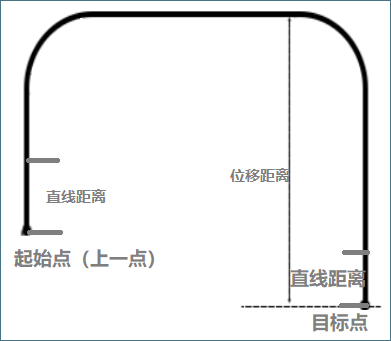
直线距离(如下图所示):保证机器人走的位移距离有一段距离是以直线的方式走的(即为门型上升起始和下降末端之间的一段竖直运动的距离)。
使用方法:直线距离不能大于位移距离;直线距离范围是:[0,5000](单位:mm)。
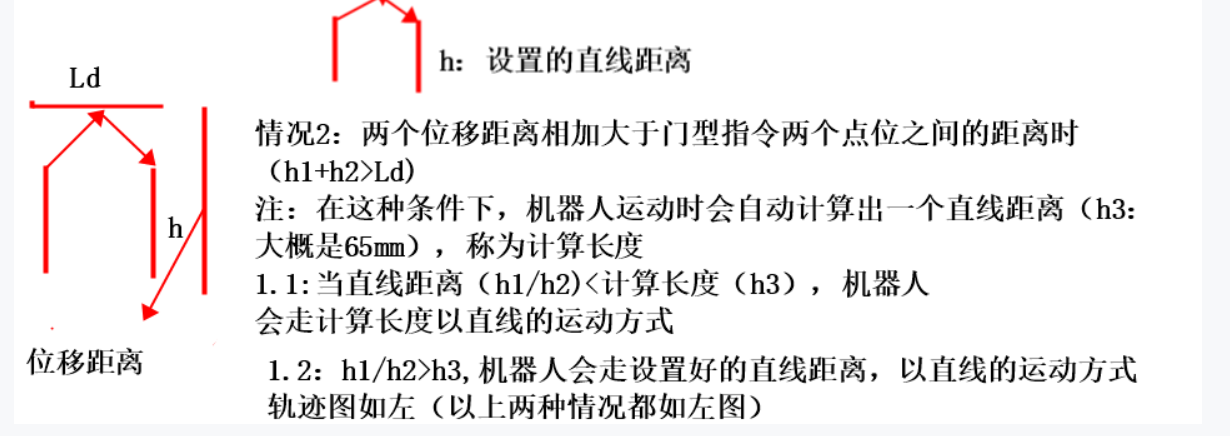
Ld是门型运动的起始点和目标点位之间的距离。
h1、h2分别是两端的位移距离。
L:计算长度(从运动开始,机器人的轨迹一定走的是直线,直到走完这个计算长度)。
情况分为两种:
h1+h2 < Ld两端位移距离之和小于两个门型指令点位的距离时)。
直线距离设置为多少,机器人就会以直线的轨迹运行多少。
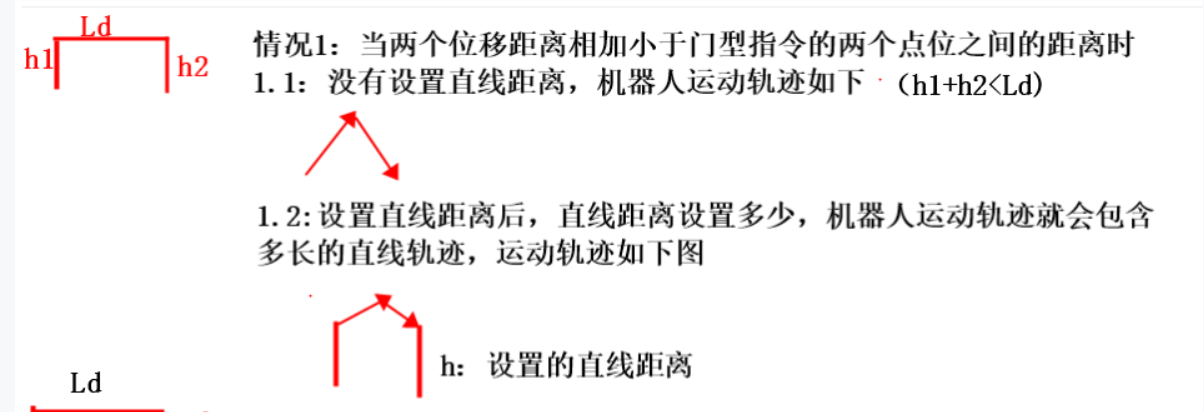
h1+h2>Ld(当 (两端位移距离之和大于两个门型指令点位的距离时,机器人会自动计算出一个L(计算长度)))
直线距离小于计算长度,机器人以直线的轨迹走计算长度
直线距离大于计算长度,机器人以直线的轨迹走直线距离的长度
AI 检索专用问答对 (Q&A for Retrieval)
Q: 标准门型运动轨迹的高度和宽度参数分别是多少?
A: 高度25mm,宽度300mm。
Q:门型运动过程中如何以快速平滑过渡?
A:设置PL可以平滑完成以更快的速度完成门型运动。