Appearance
Modbus多主站连接
功能介绍
Modbus多主站连接功能允许多个主站设备同时连接到控制器,实现对机器人的协同控制。控制器作为从站,支持最多9个主站设备同时连接,包括Modbus Poll软件、触摸屏等。
环境要求
硬件设备:
- 控制器(支持Modbus功能)
- 电脑(安装Modbus Poll软件)
- 触摸屏(支持Modbus协议)
- 交换机(用于连接控制器、电脑和触摸屏)
- 网线
软件要求:
- Modbus Poll软件(用于测试多主站连接)
- 控制器固件(支持Modbus多主站功能)
设置位置
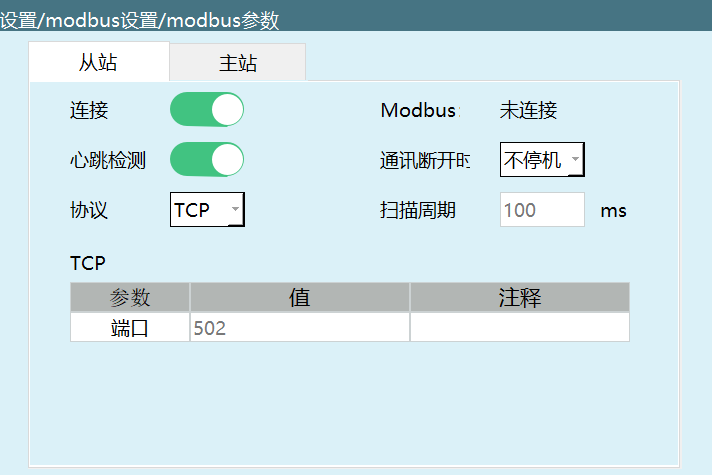
在示教器上进入:设置 → Modbus设置 → Modbus参数
连接步骤
硬件连接:
- 将电脑、触摸屏通过交换机连接到控制器
- 确保所有设备在同一网络网段
控制器设置:
- 在Modbus参数界面,选择协议为TCP
- 设置控制器作为从站
- 打开连接使能开关
- 记录控制器的IP地址和端口号
Modbus Poll连接:
- 打开Modbus Poll软件
- 点击Connection → Connect
- 连接类型选择ModbusTCP/IP
- 输入控制器的IP地址和端口号
- 设置扫描周期与示教盒一致
- 点击OK完成连接
触摸屏连接:
- 在触摸屏上配置Modbus TCP连接
- 输入控制器的IP地址和端口号
- 保存配置并建立连接
多主站控制
- 最多支持9个主站:可以同时连接多个Modbus Poll实例和触摸屏
- 并行控制:不同主站可以同时向控制器发送指令
- IP地址管理:确保所有主站设备的IP地址不冲突
- 扫描周期:所有主站的扫描周期应设置合理,避免网络拥塞
注意事项
- 网络配置:确保所有设备在同一网络网段,IP地址不冲突
- 扫描周期:设置合理的扫描周期,避免网络拥塞
- 连接数量:最多支持9个主站同时连接,超过可能导致连接失败
- 优先级:当多个主站同时发送指令时,控制器会按照接收顺序处理
- 通讯稳定性:确保网络连接稳定,避免断线情况
常见问题解答
Q1: 为什么无法建立多主站连接?
A1: 检查以下几点:
- 确保控制器的Modbus连接使能开关已打开
- 验证所有设备在同一网络网段
- 检查IP地址是否冲突
- 确认端口号设置正确
- 检查网络连接是否稳定
Q2: 多主站连接时响应缓慢怎么办?
A2: 可能的原因和解决方法:
- 减少同时连接的主站数量
- 增大扫描周期,减少通讯频率
- 检查网络带宽是否足够
- 确保控制器性能满足多主站需求
Q3: 多主站连接时出现数据冲突怎么办?
A3: 建议:
- 合理分配不同主站的控制范围
- 避免多个主站同时修改相同的参数
- 在控制系统设计时考虑多主站协同逻辑
Q4: 如何测试多主站连接是否正常?
A4: 可以通过以下方法测试:
- 在不同的Modbus Poll实例中写入不同的地址码
- 在触摸屏上操作机器人
- 观察控制器是否能正确响应所有主站的指令
- 检查通讯状态是否稳定