Appearance
1. 绑定变量参数说明
以下指令在位置变量类型中新增绑定变量:
P $ INT: 当局部整型变量(INT)赋值为某一个值时,该局部点位P为该值所表示的点位。
使用范例:I001 = 2 P$I001相当于P0002。P $ GINT: 当全局整型变量(GINT)赋值为某一个值时,该局部点位P为该值所表示的点位。
使用范例:GI001 =3 P$GI001相当于P0003。GP $ INT: 当局部整型变量(INT)赋值为某一个值时,该全局点位GP为该值所表示的点位。
使用范例:I001 = 4 GP$I001相当于GP004。GP $ GINT: 当全局整型变量(GINT)赋值为某一个值时,该全局点位GP为该值所表示的点位。
使用范例:GI001 = 5 GP$GI001相当于GP0005。E $ INT: 当局部整型变量(INT)赋值为某一个值时,该局部点位E为该值所表示的点位。
使用范例:I001 = 6 E$I001相当于E0006。E $ GINT: 当全局整型变量(GINT)赋值为某一个值时,该局部点位E为该值所表示的点位。
使用范例:I001 = 7 E$GI001相当于E0007。GE $ INT: 当局部整型变量(INT)赋值为某一个值时,该全局点位GE为该值所表示的点位。
使用范例:I001 = 8 GE$I001相当于GE0008。GE $ GINT: 当全局整型变量(GINT)赋值为某一个值时,该全局点位GE为该值所表示的点位。
使用范例:GI001 = 9 GE$GI001相当于GE0009。
2. 运动控制类指令
> 2.1 MOVJ-点到点
功能: 使用关节插补的方式移动到目标点。在机器人向目标点移动中,不受轨迹约束的区间使用。机器人在空间内以最快的速度运行。
参数说明:
| 参数 | 说明 |
|---|---|
| P/GP | 使用局部位置变量(P)或全局位置变量(GP)。当值为"新建"时,插入该指令则新建一个P变量,并将机器人的当前位置记录到该P变量。 |
| VJ | 关节插补的速度,范围1-100,单位为百分比。实际运动速度为机器人关节参数中轴最大速度乘以该百分比。 |
| PL | 平滑过渡等级,范围0-5。 |
| ACC | 加速度比率,范围1-100,单位为百分比。建议设置为与VJ值相同。 |
| DEC | 减速度比率,范围1-100,单位为百分比。建议设置为与VJ值相同。 |
| TIME | 时间,范围非负整数,单位ms。提前时间执行下一条指令。 |
注意: 当修改点到点指令的速度时,加速度&减速度会与速度成1:1的倍数关系自动显示,如需修改加速度或减速度,可手动操作。
使用范例:
MOVJ P0001 VJ = 10 % PL = 1 ACC = 10 DEC = 10 0
MOVJ GP0002 VJ = 10 % PL = 0 ACC = 7 DEC = 11 0
> 2.2 MOVL-直线
功能: 使用直线插补的方式移动到目标点。在机器人向目标点移动的过程中,机器人末端运动的轨迹为直线。
参数说明:
| 参数 | 说明 |
|---|---|
| P/GP | 使用局部位置变量(P)或全局位置变量(GP)。当值为"新建"时,插入该指令则新建一个P变量,并将机器人的当前位置记录到该P变量。 |
| V | 运动速度,范围1-1000(默认笛卡尔参数最大速度为1000,范围根据实际填写的笛卡尔参数变化),单位为mm/s。 |
| PL | 平滑过渡等级,范围0-5。 |
| ACC | 加速度比率,范围1-100,单位为百分比。建议设置为V*10%。 |
| DEC | 减速度比率,范围1-100,单位为百分比。建议设置为V*10%。 |
| TIME | 时间,范围非负整数,单位ms。提前时间执行下一条指令。 |
注意: 当修改直线指令的速度时,加速度&减速度会与速度成1:10的倍数关系自动显示,如需修改加速度或减速度,可手动操作。
使用范例:
MOVL P0003 V = 200 mm/s PL = 2 ACC = 20 DEC = 20 0
> 2.3 MOVC-圆弧
注意: 圆弧、整圆、双机整圆、曲线、外部轴圆弧等包含圆弧和整圆以及曲线的运动指令都不能单独使用,其提前执行的速度、PL等参数均受第一条(圆弧/整圆指令)指令的影响
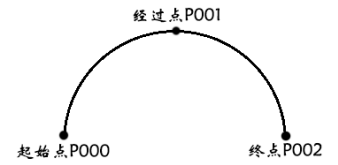
功能: 机器人通过圆弧插补示教的3个点画圆移动。若用圆弧插补示教机器人轴,移动命令是MOVC(注:机器人走一个完整的圆弧曲线需要包含一个MOVJ或MOVL指令在加上两条MOVC指令)。单一圆弧和连续圆弧的第一个圆弧的起始点只能为MOVJ或MOVL。
单一圆弧 当圆弧只有一个时,用圆弧插补示教P0001-P0003的3个点。若用关节插补或直线插补示教进入圆弧前的P0001,则P0001-P0002的轨迹自动成为直线。
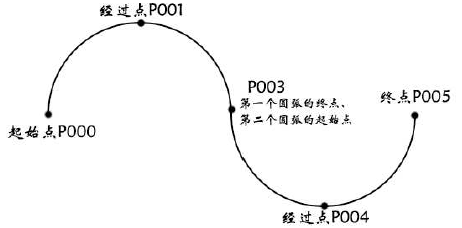
连续圆弧 当曲率发生改变的圆弧连续有2个及以上时,圆弧最终将逐个分离。因此,请在前一个圆弧与后一个圆弧的连接点加入关节或直线插补的点。
参数说明:
| 参数 | 说明 |
|---|---|
| P/GP | 使用局部位置变量(P)或全局位置变量(GP)。当值为"新建"时,插入该指令则新建一个P变量,并将机器人的当前位置记录到该P变量。 |
| V | 运动速度,范围1-1000(默认笛卡尔参数最大速度为1000,范围根据实际填写的笛卡尔参数变化),单位为mm/s。 |
| PL | 平滑过渡等级,范围0-5。 |
| ACC | 加速度比率,范围1-100,单位为百分比。建议设置为V*10%。 |
| DEC | 减速度比率,范围1-100,单位为百分比。建议设置为V*10%。 |
| TIME | 时间,范围非负整数,单位ms。提前时间执行下一条指令。 |
注意: 当修改圆弧指令的速度时,加速度&减速度会与速度成1:10的倍数关系自动显示,如需修改加速度或减速度,可手动操作。
使用范例:
MOVJ P0001 VJ = 10 % PL = 0 ACC = 1 DEC = 1 0
MOVC P0002 V = 100 mm/s PL = 0 ACC = 10 DEC = 10 0
MOVC P0003 V = 100mm/s PL = 0 ACC = 5 DEC = 8 0
> 2.4 MOVCA-整圆
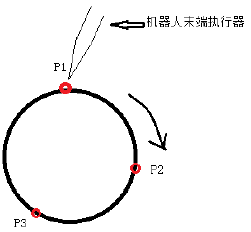
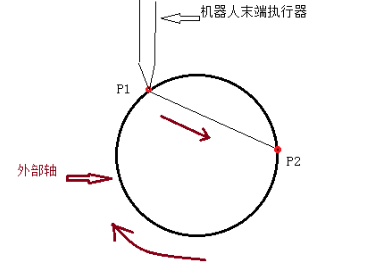
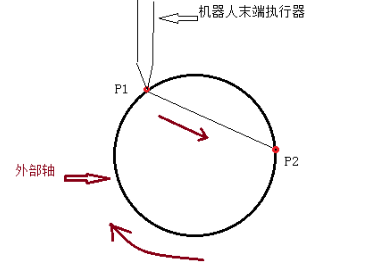
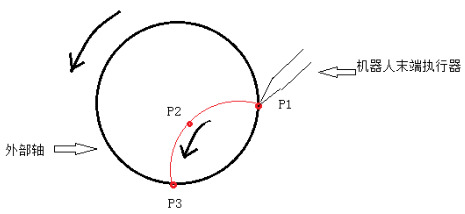
功能: 通过示教圆的起始点(MOVJ或者MOVL)和两个经过点(MOVCA),机器人走一个完整的圆。
指令插入前提:点击上方状态栏中的"工具"按钮,选中之前标定好的工具手。
插入步骤--共四条指令:
- 点击插入,点击坐标切换类,选择SWITCHTOOL指令,选择之前标定好的工具手号
- 移动到所要画的圆的任意一个点如图P1,点击插入,点击运动控制类,选择MOVJ或者MOVL
- 再移动到所要画的圆的任意一个点如图P2(要不同于第2步中的点),点击上方状态栏中的"坐标系"按钮,选中"工具"坐标系,点击插入,点击运动控制类,选择MOVCA
- 再移动到所要画的圆的任意一个点如图P3(要不同于2,3步中的点),点击上方状态栏中的"坐标系"按钮,选中"工具"坐标系,点击插入,点击运动控制类,选择MOVCA
参数说明:
| 参数 | 说明 |
|---|---|
| P/GP | 使用局部位置变量(P)或全局位置变量(G)。当值为"新建"时,插入该指令则新建一个P变量,并将机器人的当前位置记录到该P变量。 |
| V | 运动速度,范围1-1000(默认笛卡尔参数最大速度为1000,范围根据实际填写的笛卡尔参数变化),单位为mm/s。 |
| PL | 平滑过渡等级,范围0-5。 |
| ACC | 加速度比率,范围1-100,单位为百分比。建议设置为V*10%。 |
| DEC | 减速度比率,范围1-100,单位为百分比。建议设置为V*10%。 |
| TIME | 时间,范围非负整数,单位ms。提前时间执行下一条指令。 |
| SPIN | 姿态不变:整圆运行的姿态和P001的标定的姿态相同,并以这个姿态走完整圆轨迹 六轴不转:整圆的运行会按照标定的姿态进行运动,同时六轴是固定不动的 六轴旋转:整圆的运行会按照标定的状态进行运动,同时运行时六轴会旋转360度 |
注意: 当修改圆弧指令的速度时,加速度&减速度会与速度成1:10的倍数关系自动显示,如需修改加速度或减速度,可手动操作。
使用范例:
MOVJ P0001 VJ = 10 % PL = 0 ACC = 10 DEC = 10 SPIN=1 0
MOVCA P0002 V = 100 mm/s PL = 0 ACC = 10 DEC = 10 SPIN=1 0
MOVCA P0003 V = 100mm/s PL = 0 ACC = 10 DEC = 10 SPIN=1 0
> 2.5 MOVS-曲线插补
功能: 在焊接、切割、熔接、涂底漆等作业时,若使用自由曲线插补,对于不规则曲线工件的示教作业可变得容易。轨迹为通过4个点的样条曲线。若使用自由曲线插补示教机器人轴,则移动命令为MOVS。
单一 MOVS 示教P1-P4的4个点。组成样条曲线。P0-关节/直线(程序首条运动指令不可以为MOVS)。P1-P4-曲线插补。P5-关节/直线。
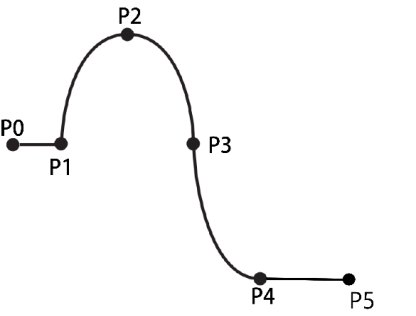
连续 MOVS 大于4个点组成的样条曲线。P1-P5组成一条样条曲线。P0-关节/直线。P1-P5-曲线插补。P6-关节/直线。
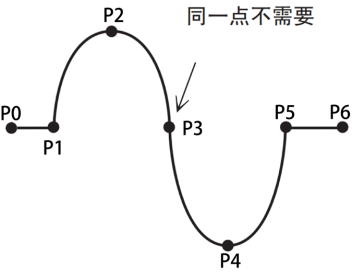
注: 曲线最少需要四个曲线点位。
参数说明:
| 参数 | 说明 |
|---|---|
| P/G | 使用局部位置变量(P)或全局位置变量(G)。当值为"新建"时,插入该指令则新建一个P变量,并将机器人的当前位置记录到该P变量。 |
| V | 运动速度,范围1-1000(默认笛卡尔参数最大速度为1000,范围根据实际填写的笛卡尔参数变化),单位为mm/s。 |
| PL | 平滑过渡等级,范围0-5。 |
| ACC | 加速度比率,范围1-100,单位为百分比。建议设置为V*10%。 |
| DEC | 减速度比率,范围1-100,单位为百分比。建议设置为V*10%。 |
| TIME | 时间,范围非负整数,单位ms。提前时间执行下一条指令。 |
注意: 当修改圆弧指令的速度时,加速度和减速度会与速度成1:10的倍数关系自动显示,如需修改加速度或减速度,可手动操作。
使用范例:
MOVJ P0001 VJ = 10 % PL = 0 ACC = 10 DEC = 10 0
MOVS P0002 V = 100 mm/s PL = 0 ACC = 10 DEC = 10 0
MOVS P0003 V = 100mm/s PL = 0 ACC = 10 DEC = 10 0
MOVS P0004 V = 100 mm/s PL = 0 ACC = 10 DEC = 10 0
MOVS P0005 V = 100mm/s PL = 0 ACC = 10 DEC = 10 0
> 2.6 IMOV-增量
功能: 以关节或直线的插补方式从当前位置按照设定的增量距离移动。
参数说明:
| 参数 | 说明 |
|---|---|
| RP | 增量变量,可选择关节、直角、工具、用户四种坐标系,对应轴填正数为正方向,负数为反方向。若不动则填0。 |
| V/VJ | 当RP为关节坐标系下的值时,该处为VJ,关节插补的速度,范围1-100,单位为百分比。实际运动速度为机器人关节参数中轴最大速度乘以该百分比。当RP为直角、工具、用户坐标系下的值时,该处为V,运动速度,范围1-1000(默认笛卡尔参数最大速度为1000,范围根据实际填写的笛卡尔参数变化),单位为mm/s。 |
| PL | 平滑过渡等级,范围0-5。 |
| ACC | 加速度比率,范围1-100,单位为百分比。建议设置为V*10%或VJ。 |
| DEC | 减速度比率,范围1-100,单位为百分比。建议设置为V*10%或VJ。 |
| TIME | 时间,范围非负整数,单位ms。提前时间执行下一条指令。 |
注意: 当修改圆弧指令的速度时,加速度和减速度会与速度成1:10的倍数关系自动显示,如需修改加速度或减速度,可手动操作。
使用范例:
IMOV RP0001 V=10mm/s BF PL=0 ACC=0 DEC=0
> 2.7 MOVJEXT-外部轴点到点
功能: 机器人以关节插补方式向示教位置移动,外部轴用关节插补运动。
参数说明:
| 参数 | 说明 |
|---|---|
| E | 同时记录机器人与外部轴位置数据的变量。当值为"新建"时,插入该指令则新建一个E变量,并将机器人与外部轴的当前位置记录到该E变量。 |
| VJ | 关节插补的速度,范围1-100,单位为百分比。实际运动速度为机器人关节参数中轴最大速度乘以该百分比。外部轴速度随机器人速度改变。 |
| PL | 平滑过渡等级,范围0-5。 |
| ACC | 加速度比率,范围1-100,单位为百分比。建议设置为与VJ值相同。 |
| DEC | 减速度比率,范围1-100,单位为百分比。建议设置为与VJ值相同。 |
| TIME | 时间,范围非负整数,单位ms。提前时间执行下一条指令。 |
注意: 当修改外部轴点到点指令的速度时,加速度和加速度会与速度成1:1的倍数关系自动显示,如需修改加速度或减速度,可手动操作。
使用范例:
MOVJEXT E0001 VJ = 10 % PL = 0 ACC= 10 DEC = 10 0
> 2.8 MOVLEXT-外部轴直线
功能: 机器人以直线插补的方式向示教位置移动,外部轴用关节插补的方式运动。
参数说明:
| 参数 | 说明 |
|---|---|
| E | 同时记录机器人与外部轴位置数据的变量。当值为"新建"时,插入该指令则新建一个E变量,并将机器人与外部轴的当前位置记录到该E变量。 |
| V | 机器人运动速度,范围1-1000(默认笛卡尔参数最大速度为1000,范围根据实际填写的笛卡尔参数变化),单位为mm/s。外部轴速度随机器人速度改变。 |
| PL | 平滑过渡等级,范围0-5。 |
| SYNC | 机器人与外部轴是否同步运动,当选是时,机器人与外部轴协作走直线。当选否时,机器人在空间中走直线,外部轴独立运动到目标角度。 |
| ACC | 加速度比率,范围1-100,单位为百分比。建议设置为V*10%。 |
| DEC | 减速度比率,范围1-100,单位为百分比。建议设置为V*10%。 |
注意: 当修改外部轴直线指令的速度时,加速度和减速度会与速度成1:10的倍数关系自动显示,如需修改加速度或减速度,可手动操作。
使用范例:
MOVLEXT E0002 V = 10 mm/s PL = 0 ACC = 1 DEC = 1 SYNC = 0 0
> 2.9 MOVCEXT-外部轴圆弧
功能: 机器人以圆弧插补方式向示教位置移动,外部轴用关节插补运动。
参数说明:
| 参数 | 说明 |
|---|---|
| E | 同时记录机器人与外部轴位置数据的变量。当值为"新建"时,插入该指令则新建一个E变量,并将机器人与外部轴的当前位置记录到该E变量。 |
| V | 机器人运动速度,范围2-2000,单位为mm/s。外部轴速度随机器人速度改变。 |
| PL | 平滑过渡等级,范围0-5。 |
| SYNC | 机器人与外部轴是否同步运动,当选是时,机器人与外部轴协作走圆弧。当选否时,机器人在空间中走圆弧,外部轴独立运动到目标角度。 |
| ACC | 加速度比率,范围1-100,单位为百分比。建议设置为V*10%。 |
| DEC | 减速度比率,范围1-100,单位为百分比。建议设置为V*10%。 |
| TIME | 时间,范围非负整数,单位ms。提前时间执行下一条指令。 |
注意: 当修改外部轴圆弧指令的速度时,加速度和减速度会与速度成1:10的倍数关系自动显示,如需修改加速度或减速度,可手动操作。
使用范例:
MOVLEXT E0002 V = 10 mm/s PL = 0 ACC = 1 DEC = 1 SYNC = 1 0
MOVCEXT E0003 V = 10 mm/s PL = 0 ACC = 1 DEC = 1 SYNC = 1 0
MOVCEXT E0004 V = 10 mm/s PL = 0 ACC = 1 DEC = 1 SYNC = 1 0
> 2.10 SPEED-全局速度
功能: SPEED指令以下的所有运动类指令的运动类指令的运动速度为:指令速度上方状态栏的速度SPEED的百分比。
参数说明: 全局速度(%):速度百分比:1-200。
使用范例:
SPEED = 9 %
> 2.11 SAMOV-定点移动
功能: 机器人以关节插补运动到一个设定好的绝对位置。如果不希望移动某个轴,请在该轴的坐标处留空(不要填0!)。
参数说明:
| 参数 | 说明 |
|---|---|
| AP | 绝对位置,可选择关节、直角、工具、用户四种坐标系,若对应轴不填写则对应轴不动。 |
| V/VJ | 当AP为关节坐标系下的值时,该处为VJ,关节插补的速度,范围1-100,单位为百分比。实际运动速度为机器人关节参数中轴最大速度乘以该百分比。当AP为直角、工具、用户坐标系下的值时,该处为V,运动速度,范围1-1000(默认笛卡尔参数最大速度为1000,范围根据实际填写的笛卡尔参数变化),单位为mm/s。 |
| PL | 平滑过渡等级,范围0-5。 |
| ACC | 加速度比率,范围1-100,单位为百分比。建议设置为V*10%或与VJ相同。 |
| DEC | 减速度比率,范围1-100,单位为百分比。建议设置为V*10%或与VJ相同。 |
| TIME | 时间,范围非负整数,单位ms。提前时间执行下一条指令。 |
注意: 当修改定点移动指令的速度时,加速度和减速度会与速度成1:10的倍数关系自动显示,如需修改加速度或减速度,可手动操作。
使用范例:
SAMOV AP0001 VJ= 10 % PL= 2 ACC= 10 DEC= 10
> 2.12 MOVJDOUBLE-双机点到点
功能: 当设置为两台机器人时,令两台机器人同时走关节插补运动到目标位置,同时启停。
参数说明:
| 参数 | 说明 |
|---|---|
| E | 同时记录两台机器人位置数据的变量。当值为"新建"时,插入该指令则新建一个E变量,并将两台机器人的当前位置记录到该E变量。 |
| VJ | 关节插补的速度,范围1-100,单位为百分比。实际运动速度为机器人关节参数中轴最大速度乘以该百分比。两台机器人的速度同步 |
| ACC | 加速度比率,范围1-100,单位为百分比。建议设置为与VJ值相同。 |
| DEC | 减速度比率,范围1-100,单位为百分比。建议设置为与VJ值相同。 |
| TIME | 时间,范围非负整数,单位ms。提前时间执行下一条指令。 |
注意: 当修改双机点到点指令的速度时,加速度和减速度会与速度成1:1的倍数关系自动显示,如需修改加速度或减速度,可手动操作。
使用范例:
MOVJDOUBLE E0001 VJ = 10 % PL = 0 ACC= 10 DEC = 10 0
> 2.13 MOVLDOUBLE-双机直线
功能: 当设置为两台机器人时,令两台机器人同时走直线插补运动到目标位置。同时启停。
参数说明:
| 参数 | 说明 |
|---|---|
| E | 同时记录两台机器人位置数据的变量。当值为"新建"时,插入该指令则新建一个E变量,并将两台机器人的当前位置记录到该E变量。 |
| V | 机器人运动速度,范围1-1000(默认笛卡尔参数最大速度为1000,范围根据实际填写的笛卡尔参数变化),单位为mm/s。两台机器人速度同步。 |
| ACC | 加速度比率,范围1-100,单位为百分比。建议设置为V*10%。 |
| DEC | 减速度比率,范围1-100,单位为百分比。建议设置为V*10%。 |
| TIME | 时间,范围非负整数,单位ms。提前时间执行下一条指令。 |
注意: 当修改双机直线指令的速度时,加速度和减速度会与速度成1:10的倍数关系自动显示,如需修改加速度或减速度,可手动操作。
使用范例:
MOVLDOUBLE E0001 V = 100 mm/s PL = 0 ACC= 10 DEC = 10 0
> 2.14 MOVCDOUBLE-双机圆弧
功能: 当设置为两台机器人时,令两台机器人同时走圆弧插补运动到目标位置。同时启停。
参数说明:
| 参数 | 说明 |
|---|---|
| E | 同时记录两台机器人位置数据的变量。当值为"新建"时,插入该指令则新建一个E变量,并将两台机器人的当前位置记录到该E变量。 |
| V | 机器人运动速度,范围1-1000(默认笛卡尔参数最大速度为1000,范围根据实际填写的笛卡尔参数变化),单位为mm/s。两台机器人速度同步。 |
| PL | 平滑过渡等级,范围0-5。 |
| ACC | 加速度比率,范围1-100,单位为百分比。建议设置为V*10%。 |
| DEC | 减速度比率,范围1-100,单位为百分比。建议设置为V*10%。 |
| TIME | 时间,范围非负整数,单位ms。提前时间执行下一条指令。 |
注意: 当修改双机圆弧指令的速度时,加速度和减速度会与速度成1:10的倍数关系自动显示,如需修改加速度或减速度,可手动操作。
使用范例:
MOVLDOUBLE E0001 VJ = 10 % PL = 0 ACC= 10 DEC = 10 0
MOVCDOUBLE E0002 V = 100 mm/s PL = 0 ACC= 10 DEC = 10 0
MOVCDOUBLE E0003 V = 100mm/s PL = 0 ACC= 10 DEC = 10 0
> 2.15 MOVCADOUBLE-双机整圆
功能: 当设置为两台机器人时,令两台机器人同时走整圆插补运动到目标位置。同时启停。
参数说明:
| 参数 | 说明 |
|---|---|
| E | 同时记录两台机器人位置数据的变量。当值为"新建"时,插入该指令则新建一个E变量,并将两台机器人的当前位置记录到该E变量。 |
| V | 机器人运动速度,范围1-1000(默认笛卡尔参数最大速度为1000,范围根据实际填写的笛卡尔参数变化),单位为mm/s。两台机器人速度同步。 |
| PL | 平滑过渡等级,范围0-5。 |
| ACC | 加速度比率,范围1-100,单位为百分比。建议设置为V*10%。 |
| DEC | 减速度比率,范围1-100,单位为百分比。建议设置为V*10%。 |
| TIME | 时间,范围非负整数,单位ms。提前时间执行下一条指令。 |
注意: 当修改双机整圆指令的速度时,加速度和减速度会与速度成1:10的倍数关系自动显示,如需修改加速度或减速度,可手动操作。
使用范例:
MOVLDOUBLE E0001 VJ = 10 % PL = 0 ACC= 10 DEC = 10 0
MOVCADOUBLE E0002 V = 100 mm/s PL = 0 ACC= 10 DEC = 10 0
MOVCADOUBLE E0003 V = 100 mm/s PL = 0 ACC= 10 DEC = 10 0
> 2.16 MOVCOMM-外部点
功能: 以规定的插补方式运动到外部设备通过Modbus或TCP发给控制器的点位。
参数说明:
| 参数 | 说明 |
|---|---|
| 插补方式 | 运动到目标点所使用的插补方式,包含关节、直线、曲线。 |
| V/VJ | 当B为关节坐标系下的值时,该处为VJ,关节插补的速度,范围1-100,单位为百分比。实际运动速度为机器人关节参数中轴最大速度乘以该百分比。当B为直角、工具、用户坐标系下的值时,该处为V,运动速度,范围1-1000(默认笛卡尔参数最大速度为1000,范围根据实际填写的笛卡尔参数变化),单位为mm/s。 |
| PL | 平滑过渡等级,范围0-5。 |
| ACC | 加速度比率,范围1-100,单位为百分比。建议设置为V*10%或与VJ相同。 |
| DEC | 减速度比率,范围1-100,单位为百分比。建议设置为V*10%或与VJ相同。 |
| TIME | 时间,范围非负整数,单位ms。提前时间执行下一条指令。 |
使用范例:
MOVCOMM MOVL VJ= 10 mm/s PL = 0 ACC = 1 DEC = 1 0
> 2.17 EXTMOV-外部轴随动
功能: 外部轴按机器人线速度倍数的速度或恒速跟随机器人随动的指令。
参数说明:
| 参数 | 说明 |
|---|---|
| 外部轴 | 可选O1-O5某个轴进行随动。 |
| 类型 | 随动类型:随机器人实时线速度改变速度。 • K:外部轴速度(°/s)=K*线速度(mm/s)。 恒速类型:为恒定按某个速度运行。 • 速度值来源:可选INT/DOUBLE/GINT/GDOUBLE/手填。 • 变量名:速度值来源为INT/DOUBLE/GINT/GDOUBLE时,用于选择哪个变量。 • 手填值:速度值来源为手填时,用于输入恒定运行的速度值。 |
使用范例:
EXTMOV O1 FOLLOW 22.22
> 2.18 GEARIN-电子齿轮
功能: 让外部轴某轴随机器人某轴一起运动的指令。
参数说明:
| 参数 | 说明 |
|---|---|
| 主轴 | 可选机器人的J1~J6轴 |
| 外部轴 | 可选O1-O5某个轴进行随动 |
| 比例关系K | 随动轴速(°/s)=K*主轴速(°/s) |
使用范例:
GEARIN J1 O1 22.22
> 2.19 MRESET-复位外部轴多圈转动量
功能: 根据外部轴旋转轴设置的最大最小限位,当外部轴旋转超出限位后使用此指令可将外部轴坐标复位继续旋转,让外部轴不会因超限而报错。
参数说明: MRESET:可选全部轴、单个轴
使用范例:
MRESET 0
> 2.20 DRAG_TRAJECTORY-拖拽示教
功能: 机器人按照之前记录的轨迹运行。
参数说明:
| 参数 | 说明 |
|---|---|
| 轨迹名 | 机器人轨迹的名称 |
| 回放速率 | 运动速度(0~500%) |
使用范例:
DRAG_TRAJECTORY Track1 20%
> 2.21 SWITHCPAYLOAD-切换负载参数
功能: 实际运行中,实际负载和负载参数匹配。切换负载编号指令用于切换负载参数。会影响碰撞检测和力矩前馈。
参数说明: 负载编号:可以填工具号也可以用绑定变量功能。
使用范例:
SWITHCPAYLOAD 1
> 2.22 MOVARCH-门型运动
功能: 可以让机器人按照门型轨迹运动。
参数说明:
| 参数 | 说明 |
|---|---|
| P/G | 使用局部位置变量(P)或全局位置变量(G)。当值为"新建"时,插入该指令则新建一个P变量,并将机器人的当前位置记录到该P变量。 |
| V | 运动速度,范围1-1000(默认笛卡尔参数最大速度为1000,范围根据实际填写的笛卡尔参数变化),单位为mm/s。 |
| PL | 平滑过渡等级,范围0-5。 |
| ACC | 加速度比率,范围1-100,单位为百分比。 |
| DEC | 减速度比率,范围1-100,单位为百分比。 |
| 位移轴 | (X,Y,Z)门型运动时进行位移的轴,标准门型运动位移的是Z轴方向。 |
| 位移距离 | 需要在位移轴上位移的距离,标准门型运动是在Z轴上位移25mm。 |
| 直线距离 | 在门型上升端和下降末端保持一段竖直运动的距离。 |
| TIME | 时间,范围非负整数,单位ms。提前时间执行下一条指令。 |
| 查看轨迹图示 | 可以查看门型运动轨迹图示。 |
注意: 当修改点到点指令的速度时,加速度&减速度会与速度成1:10的倍数关系自动显示,如需修改加减速度以及加减速度,可手动操作。
使用范例:
MOVARCH P001 V=10 PL=0 ACC=10 DEC=10 X 10 0
MOVARCH GP001 V=10 PL=0 ACC=10 DEC=10 X 10 0
3. 输入输出类指令
> 3.1 DIN-IO输入
功能: 读取IO板的数字输入值,并存储到一个整型或布尔型变量中。
参数说明:
| 参数 | 说明 |
|---|---|
| 端口值存入 | 将输入值存到目标变量的变量名及变量类型中。 |
| 输入IO板 | 若有多个EtherCAT IO,则可选择是第几个IO板。 |
| 输入组号(输入路数) | 输入是按照组来读的,分别为1路、4路、8路一组。1路一组则16个DIN端口为16组;4路一组则1-4、5-8、9-12、13-16各为一组;8路一组则1-8、9-16各为一组,可以通过绑定变量的功能选择组号,读入变量的数据是将输入的端口值由2进制转为10进制存入变量中。 例:8路一组,1-8号端口的值为10110101,那么从8号端口开始则为10101101。将其转为10进制则为173,则存入变量为173。 |
使用范例:
DIN I001 IN#(5)
> 3.2 DOUT-IO输出
功能: 将IO板上对应的IO端口置高或置低。
参数说明:
| 参数 | 说明 |
|---|---|
| 输出IO板 | 若有多个EtherCAT IO,则可选择是第几个IO板。 |
| 输出组号(输出路数) | 输出是按照组来输出的,分别为1路、4路、8路一组。1路一组则16个DOUT端口为16组;4路一组则1-4、5-8、9-12、13-16各为一组;8路一组则1-8、9-16各为一组。 |
| 输出值(变量来源) | 分为手动选择和变量类型。手动选择就是在下面的框中打钩,选中的输出1,未选中的输出0。例:当输出组号为4路输出,第2组时,下面的选择框中端口1、端口3选中,其它两个留空,那么运行该指令时,IO板的输出端口中5-8号端口的输出值为1010。当变量来源选择INT、GINT、BOOL、GBOOL时,会将对应变量值转换为2进制,输出到IO板上。 例:若变量值为173,则其转换为二进制则为10101101。若8路一组,将二进制值从8号端口开始输出,那么8-1号端口值为10101101,1-8号端口的值为10110101。 |
| 变量名 | 变量来源选择INT、GINT、BOOL、GBOOL时,这里选择要输出的变量名。 |
| 时间 | 置反输出时间,输出在规定时间后置反。例如DOUT1=1、时间为2,则DOUT1输出高电平2秒后置反为低电平;如果时间为0,则持续输出高电平。 |
| 错误停止处理 | 保持输出为报错时io持续按照指令设置的参数继续输出,计时结束停止为直到计时结束时停止 |
使用范例:
DOUT OT#(1) I001 0
> 3.3 AIN-模拟输入
功能: 将对应模拟输入口的输入值读入到目标变量中。
参数说明:
| 参数 | 说明 |
|---|---|
| 模拟输入口 | 要读取的模拟输入口。 |
| 变量值来源 | 目标变量的变量类型。 |
| 变量名 | 目标变量的变量名。 |
使用范例:
AIN D001 B001
> 3.4 AOUT-模拟输出
功能: 将对应模拟输出口的输出值置为定义的值。
参数说明:
| 参数 | 说明 |
|---|---|
| 模拟输出口 | 要输出的端口。 |
| 变量值来源 | 要输出的值的变量类型。 |
| 新参数 | 当变量值选择自定义时,在这里输入手填数据,范围0-10V,对应端口则会输出该值。 |
| 变量名 | 要输出值的变量的变量名。 |
使用范例:
AOUT AOUT1 1.1
> 3.5 PULSEOUT-脉冲输出
功能: 按照设定的脉冲频率与个数,在R1 PWMIO板上的DB9端子的引脚4(PWM+)上进行输出。
参数说明:
| 参数 | 说明 |
|---|---|
| 个数 | 脉冲个数。 |
| 频率 | 脉冲频率。 |
使用范例:
PULSEOUT RATE = 100 SUM = 100
> 3.6 READ_DOUT-读取输出
功能: 读取数字输出端口的输出状态,并存入目标变量中。
参数说明:
| 参数 | 说明 |
|---|---|
| 输出IO板 | 若有多个EtherCAT IO,则可选择是第几个IO板。 |
| 变量类型 | 要存入的目标变量的变量类型。 |
| 变量名 | 要存入的目标变量的变量名。 |
| 输出组号(输出路数) | 读取输出端口的值是按照组来读取的。分别为1路、4路、8路一组。1路一组则16个DOUT端口为16组;4路一组则1-4、5-8、9-12、13-16各为一组;8路一组则1-8、9-16各为一组。 例:8路一组,1-8号端口的值为10110101,那么从8号端口开始则为10101101。将其转为10进制则为173,则存入变量为173。 |
使用范例:
READ_DOUT I001 OT#(1)
4. 定时器类
> 4.1 TIMER-延时
功能: 延时设置的值,然后继续运行。
参数说明: 变量值来源:可以在新参数手填值。也可以再更多选项中选择绑定的变量,会延时变量值对应的时间长度。
使用范例:
TIMER T= 10
5. 运算类
> 5.1 ADD-加
功能: 加法运算(+),A=A+B。
参数说明:
| 参数 | 说明 |
|---|---|
| 变量 | 被加数A的变量类型可以手填可以选择更多中的变量类型。 |
| 变量值 | 加数B的变量类型,可以手填可以选择更多中的变量类型。 |
使用范例:
ADD GI001 22;含义:GI001=GI001+22
ADD GI002 I003;含义:GI002=GI002+I003
> 5.2 SUB-减
功能: 减法运算(-),A=A-B。
参数说明:
| 参数 | 说明 |
|---|---|
| 变量 | 被减数A的变量类型可以手填可以选择更多中的变量类型。 |
| 变量值 | 减数B的变量类型,可以手填可以选择更多中的变量类型。 |
使用范例:
SUB GI001 22;含义:GI001=GI001-22
SUB GI002 I003;含义:GI002=GI002-I003
> 5.3 MUL-乘
功能: 乘法运算(),A=AB。
参数说明:
| 参数 | 说明 |
|---|---|
| 变量 | 被乘数A的变量类型,可以手填可以选择更多中的变量类型。 |
| 变量值 | 乘数B的变量类型,可以手填可以选择更多中的变量类型。 |
| 新参数 | 当变量值来源选择自定义时,本输入框有效,所填值为B的值。 |
| 来源参数 | 当变量值来源选择变量时,这里为B的变量名。 |
使用范例:
MUL GI001 22;含义:GI001=GI001*22
MUL GI002 I003;含义:GI002=GI002*I003
> 5.4 DIV-除
功能: 除法运算(÷),A=A÷B。
参数说明:
| 参数 | 说明 |
|---|---|
| 变量 | 被除数A的变量类型,可以手填可以选择更多中的变量类型。 |
| 变量值 | 除数B的变量类型,可以手填可以选择更多中的变量类型。 |
使用范例:
DIV GI001 22;(含义:GI001=GI001÷22)
DIV GI002 I003;(含义:GI002=GI002÷I003)
> 5.5 MOD-模
功能: 取模运算(Mod),A=A Mod B。
参数说明:
| 参数 | 说明 |
|---|---|
| 变量 | 被除数A的变量类型,可以手填可以选择更多中的变量类型。 |
| 变量值来源 | 除数B的变量类型,可以手填可以选择更多中的变量类型。 |
使用范例:
MOD GI001 22; (含义:GI001=GI001 Mod 22)
MOD GI002 I003;(含义:GI002=GI002 Mod I003)
> 5.6 SIN-正弦
功能: 正弦运算(sin),A=sin(B),B为弧度制rad。
参数说明:
| 参数 | 说明 |
|---|---|
| 变量 | 结果值A的变量类型,可以手填可以选择更多中的变量类型。 |
| 变量值 | 正弦弧度值B的变量类型,可以手填可以选择更多中的变量类型。 |
使用范例:
SIN GI001 22; (含义:GI001=sin(22))
SIN GI002 I003;(含义:GI002=sin(I003))
> 5.7 COS-余弦
功能: 余弦运算(cos),A=cos(B),B为弧度制rad。
参数说明:
| 参数 | 说明 |
|---|---|
| 变量 | 结果值A的变量类型,可以手填可以选择更多中的变量类型。 |
| 变量值 | 余弦弧度值B的变量类型,可以手填可以选择更多中的变量类型。 |
使用范例:
COS GI001 22; (含义:GI001=cos(22))
COS GI002 I003;(含义:GI002=cos(I003))
> 5.8 ATAN-反正切
功能: 反正切运算(arctan),A=arctan(B),B为弧度制rad。
参数说明:
| 参数 | 说明 |
|---|---|
| 变量 | 结果值A的变量类型,可以手填可以选择更多中的变量类型。 |
| 变量值 | 反正切弧度值B的变量类型,可以手填可以选择更多中的变量类型。 |
使用范例:
ATAN GI001 22;含义:GI001=arctan(22)
ATAN GI002 I003;含义:GI002=arctan(I003)
> 5.9 LOGICAL_OP-逻辑运算
功能: 逻辑运算(与或非),B001=I001andI002。
参数说明:
| 参数 | 说明 |
|---|---|
| 参数1类型 | 参与运算的参数1的变量类型。 |
| 参数1名 | 参与运算的参数1的变量名。 |
| 运算类型 | 逻辑与(&&),逻辑或( |
| 参数2类型 | 参与运算的参数2的变量类型。 |
| 参数2名 | 参与运算的参数2的变量名。 |
| 结果存入变量类型 | 运算结果存入的变量类型。 |
| 结果存入变量名 | 运算结果存入的变量名 |
使用范例:
LOGICAL_OP B001 = I001 AND 10;(含义:变量I001、常数10逻辑与运算结果存入B001)
6. 条件控制类
注: 条件判断需要用字符串作比较时,实际作比较时比较的是字符所对应的ASCII码值。
> 6.1 CALL-调用子程序
功能: 调用另一个程序,被调用程序运行完后则返回原程序CALL指令的下一行继续运行。
参数说明:
| 参数 | 说明 |
|---|---|
| CALL | 被调用程序名称。 |
使用范例:
CALL [Program]:(含义:调用程序Program)
> 6.2 CALL_LUAFILE-调用LUA文件
功能: 调用从upgrade中上传的Lua文件。
参数说明:
| 参数 | 说明 |
|---|---|
| CALL_LUAFILE | 调用Lua文件名称。 |
| 传入参数个数 | Lua文件传入参数数量。 |
| 传入参数选择 | 选择所需传入参数的数量与值(数量应与实际Lua文件相同)。 |
| 输出参数个数 | Lua文件输出参数数量。 |
| 输出参数选择 | 选择所需输出参数的数量与值(数量可以少于实际Lua文件)。 |
使用范例:
CALL_LUAFILE [$demo.lua$] IN (1.0,2.0,3.0,) OUT (2.0,2.0)
即调用Lua文件demo.lua,往demo中传入3个值分别为1,2,3,demo传出2个值都为2。
> 6.3 IF-如果
功能: 如果IF指令的条件满足时,则执行IF与ENDIF之间的指令,如果IF指令的条件不满足,则直接跳转到ENDIF指令继续运行ENDIF下面的指令,不运行IF与ENDIF之间的指令。
IF的判断条件为(比较数1比较方式 比较数2),例如比较数1为2,比较数2为1,比较方式为">",则2>1,判断条件成立;若比较方式为"<"或"==",则判断条件不成立。
IF指令可以单独使用,也可搭配ELSEIF、ELSE两条指令使用。注意,ELSEIF、ELSE指令不可脱离IF指令单独使用!
注意,当程序的开头为IF且最后一行为ENDIF指令时,请在IF指令上方或ENDIF下方插入一条0.1秒的TIMER(延时)指令,否则当IF指令的条件不满足时会导致程序陷入死机状态。
插入IF指令时会同时插入ENDIF指令,当删除IF指令时请注意将对应的ENDIF指令也删掉,否则会导致程序无法执行。
IF指令中可以嵌套另一个IF指令或WHILE、JUMP等其它条件判断类指令。
现在IF支持多条件判断按顺序判断,有括号的优先判断括号内的再于括号外的进行判断,最多支持5个判断条件。
参数说明:
| 参数 | 说明 |
|---|---|
| 参数类型 | 比较数1的类型,变量或数字、模拟量的输入值。 |
| 参数名 | 若参数类型选择的类型为变量(INT、DOUBLE、BOOL、GINT、GDOUBLE、GBOOL),则此处为比较数1的变量名 若参数类型选择的类型为输入值(DIN、AIN),则此处为数字输入或模拟输入的端口号 |
| 比较方式 | == 等于 < 小于 > 大于 <= 小于或等于 >= 大于或等于 != 不等于 |
| 变量值来源 | 比较数2的类型,自定义或变量或数字、模拟量的输入值。 |
| 新参数 | 若变量值来源选择的类型为自定义,则此处不可选 若变量值来源选择的类型为变量(INT、DOUBLE、BOOL、GINT、GDOUBLE、GBOOL),则此处为比较数1的变量名 若变量值来源选择的类型为输入值(DIN、AIN),则此处为数字输入或模拟输入的端口号 |
| 来源参数 | 若变量值来源处选择的为自定义,则在此处直接填写比较数2的值。 |
使用范例:
IF (GI001>=D001)
其它指令,如MOVJ等。
ENDIF
> 6.4 ELSEIF-否则如果
功能: ELSEIF指令必须插入在IF和ENDIF之间,ELSEIF与ENDIF之间还可以插入一条ELSE指令或多条ELSEIF指令。
当IF的条件满足时,会忽略掉ELSEIF和ELSEIF与ENDIF之间的指令,仅运行IF与ELSEIF之间的指令,然后跳转到ENDIF下面的一行指令继续运行。
当IF的条件不满足时,会跳转到ELSEIF指令,判断ELSEIF的判断条件,若满足,则运行ELSEIF和ENDIF之间的指令,然后继续运行ENDIF下面的指令;若不满足,则直接跳转到ENDIF下面的一行指令继续运行。
若在IF与ENDIF中嵌套了多条ELSEIF,当IF的判断条件不成立时首先判断第一条ELSEIF的判断条件,若成立则运行第一条ELSEIF与第二条ELSEIF之间的指令;若不成立则判断第二条ELSEIF的判断条件,以此类推。
注意,当删除IF指令时,需删除与其对应的ELSEIF和ENDIF指令,否则会导致程序无法运行。
现在ELSEIF支持多条件判断按顺序判断,有括号的优先判断括号内的再于括号外的进行判断,最多支持5个判断条件。
参数说明:
| 参数 | 说明 |
|---|---|
| 参数类型 | 比较数1的类型,变量或数字、模拟量的输入值。 |
| 参数名 | 若参数类型选择的类型为变量(INT、DOUBLE、BOOL、GINT、GDOUBLE、GBOOL),则此处为比较数1的变量名。 若参数类型选择的类型为输入值(DIN、AIN),则此处为数字输入或模拟输入的端口号。 |
| 比较方式 | == 等于 < 小于 > 大于 <= 小于或等于 >= 大于或等于 != 不等于 |
| 变量值来源 | 比较数2的类型,自定义或变量或数字、模拟量的输入值。 |
| 新参数 | 若变量值来源选择的类型为自定义,则此处不可选 若变量值来源选择的类型为变量(INT、DOUBLE、BOOL、GINT、GDOUBLE、GBOOL),则此处为比较数1的变量名 若变量值来源选择的类型为输入值(DIN、AIN),则此处为数字输入或模拟输入的端口号 |
| 来源参数 | 若变量值来源处选择的为自定义,则在此处直接填写比较数2的值。 |
使用范例:
IF (GI001>=D001)
其它指令1,如MOVJ等
ELSEIF (D001<9)
其它指令2,如MOVJ等
ENDIF
> 6.5 ELSE-否则
功能: ELSE指令必须插入在IF和ENDIF之间,但是一个IF指令只能嵌入一条ELSE指令。
当IF的判断条件成立时,会运行IF与ELSE之间的指令后跳转到ENDIF的下一行指令继续运行,而不运行ELSE和ENDIF之间的指令。
当IF的判断条件不成立时,会跳转到ELSE与ENDIF之间的指令运行,而不运行IF与ELSE之间的指令。
注意,当删除IF指令时,需删除与其对应的ELSE和ENDIF指令,否则会导致程序无法运行。
参数说明: 略。
使用范例:
IF (GI001<9)
其它指令1,如MOVJ等
ELSE
其它指令2,如MOVJ等
ENDIF
> 6.6 WAIT-等待
功能: WAIT即等待,可以选择是否有等待时间。当没有勾选"TIME"选项,则在判断条件不成立时一直停留在该WAIT指令等待,直到判断条件成立。若勾选了"TIME"选项,则会在等待该参数的时长后不再等,继续运行下一条指令。若在等待时条件变为成立,则立刻运行下一条指令。
现在WAIT支持多条件判断按顺序判断,有括号的优先判断括号内的再于括号外的进行判断,最多支持5个判断条件。
参数说明:
| 参数 | 说明 |
|---|---|
| 参数类型 | 比较数1的类型,变量或数字、模拟量的输入值。 |
| 参数名 | 若参数类型选择的类型为变量(INT、DOUBLE、BOOL、GINT、GDOUBLE、GBOOL),则此处为比较数1的变量名。 若参数类型选择的类型为输入值(DIN、AIN),则此处为数字输入或模拟输入的端口号。 |
| 比较方式 | == 等于 < 小于 > 大于 <= 小于或等于 >= 大于或等于 != 不等于 |
| 变量值来源 | 比较数2的类型,自定义或变量或数字、模拟量的输入值。 |
| 新参数 | 若变量值来源选择的类型为自定义,则此处不可选。 若变量值来源选择的类型为变量(INT、DOUBLE、BOOL、GINT、GDOUBLE、GBOOL),则此处为比较数1的变量名。 若变量值来源选择的类型为输入值(DIN、AIN),则此处为数字输入或模拟输入的端口号。 |
| 来源参数 | 若变量值来源处选择的为自定义,则在此处直接填写比较数2的值。 |
| TIME | 可选项,不选则永远等待直到条件成立。 选择则可填写等待时间(秒),等待到该时长后,即使条件依然不成立,依然会跳转到下一行继续运行。 |
| PL是否连续 | 是指机器人的轨迹曲线的平滑是否会被打断。 连续:在条件满足后,机器人运行曲线较为平滑。 不连续:在条件满足后,机器人的轨迹平滑被打断。 |
| 滤波时间 | 可选项,不选则无作用。 选择则为输入信号满足时间,当输入信号时长满足滤波时间时(无需等待TIME),跳转到下一行继续运行,不满足滤波时间时,则等待TIME时间之后跳转到下一行继续运行。 |
使用范例:
WAIT (GI001==2) T = 2 F = 1
> 6.7 WHILE-循环
功能: 当WHILE指令的条件满足时,会循环运行WHILE与ENDWHILE两条指令之间的指令。在运行到WHILE指令之前若判断条件不满足,在运行到WHILE指令时会直接跳转到ENDWHILE指令而不运行WHILE与ENDWHILE之间的指令;若在运行WHILE与ENDWHILE之间的指令过程中,判断条件变成不满足,会继续运行,直到运行到ENDWHILE行,不再循环而是继续运行ENDWHILE下面的指令。
WHILE的判断条件为(比较数1比较方式 比较数2),例如比较数1为2,比较数2为1,比较方式为">",则2>1,判断条件成立;若比较方式为"<"或"==",则判断条件不成立。
注意,插入WHILE指令的同时会同时插入ENDWHILE指令。若要删除WHILE指令请同时删掉其对应的ENDWHILE指令,否则会导致程序无法运行。
当程序的开头为WHILE且最后一样指令为ENDWHILE时,请在程序的开头或结尾插入一条0.3秒的TIMER(延时)指令。否则当WHILE指令的条件不满足时会导致程序陷入死机。
当WHILE内部的指令没有运动类指令或在某种情况下可能会陷入死循环时,请在WHILE与ENDWHILE间插入一条0.3秒的TIMER(延时)指令,否则当WHILE指令的条件满足时可能会导致程序陷入死机。
WHILE指令可以同时嵌套多个WHILE、IF或JUMP等其它判断类指令使用。
现在WHILE支持多条件判断按顺序判断,有括号的优先判断括号内的再于括号外的进行判断,最多支持5个判断条件。
参数说明:
| 参数 | 说明 |
|---|---|
| 参数类型 | 比较数1的类型,变量或数字、模拟量的输入值。 |
| 参数名 | 若参数类型选择的类型为变量(INT、DOUBLE、BOOL、GINT、GDOUBLE、GBOOL),则此处为比较数1的变量名 若参数类型选择的类型为输入值(DIN、AIN),则此处为数字输入或模拟输入的端口号 |
| 比较方式 | == 等于 < 小于 > 大于 <= 小于或等于 >= 大于或等于 != 不等于 |
| 变量值来源 | 比较数2的类型,自定义或变量或数字、模拟量的输入值。 |
| 新参数 | 若变量值来源选择的类型为自定义,则此处不可选 若变量值来源选择的类型为变量(INT、DOUBLE、BOOL、GINT、GDOUBLE、GBOOL),则此处为比较数1的变量名 若变量值来源选择的类型为输入值(DIN、AIN),则此处为数字输入或模拟输入的端口号 |
| 来源参数 | 若变量值来源处选择的为自定义,则在此处直接填写比较数2的值。 |
使用范例:
WHILE (GI001<2)
其它指令1,MOVJ等
WHILE (D001<10)
其它指令2,MOVJ等
ADD D001 1
ENDWHILE
其它指令3
ADD GI001 1
ENDWHILE
> 6.8 LABEL-标签
功能: JUMP指令跳转的目标标签。
参数说明:
| 参数 | 说明 |
|---|---|
| 标签名 | 标签的名字,需使用字母开头的字符串。 |
使用范例:
LABEL *A1
> 6.9 JUMP-跳转
功能: JUMP用于跳转,必须与LABEL(标签)指令配合使用。
- JUMP可以设置有无判断条件。当设置为没有判断条件时,运行到该指令会直接跳转到对应的LABEL指令后继续运行LABEL下一行指令。
- 当设置为有判断条件时,若条件满足则跳转到LABEL指令行;若条件不满足则忽略JUMP指令,继续运行JUMP指令的下一行指令。
- LABEL标签可以插在JUMP的上方或者下方,但不可跨程序跳转。
- LABEL标签名必须为字母开头的两位以上字符。
- 插入LABEL标签对程序的运行没有影响,但是要符合程序运行规则,例如不能插在MOVC指令的上面或插在局部变量定义指令的上面。
- 现在JUMP支持多条件判断按顺序判断,有括号的优先判断括号内的再于括号外的进行判断,最多支持5个判断条件。
参数说明:
| 参数 | 说明 |
|---|---|
| 标签名 | 已插入LABEL指令的标签名,选项。 |
| 判断条件 | 选项,若选中则可以设置判断条件。 若不选中则运行到JUMP后直接跳转。 |
| 参数类型 | 比较数1的类型,变量或数字、模拟量的输入值。 |
| 参数名 | 若参数类型选择的类型为变量(INT、DOUBLE、BOOL、GINT、GDOUBLE、GBOOL),则此处为比较数1的变量名 若参数类型选择的类型为输入值(DIN、AIN),则此处为数字输入或模拟输入的端口号 |
| 比较方式 | == 等于 < 小于 > 大于 <= 小于或等于 >= 大于或等于 != 不等于 |
| 变量值来源 | 比较数2的类型,自定义或变量或数字、模拟量的输入值。 |
| 新参数 | 若变量值来源选择的类型为自定义,则此处不可选 若变量值来源选择的类型为变量(INT、DOUBLE、BOOL、GINT、GDOUBLE、GBOOL),则此处为比较数1的变量名 若变量值来源选择的类型为输入值(DIN、AIN),则此处为数字输入或模拟输入的端口号 |
| 来源参数 | 若变量值来源处选择的为自定义,则在此处直接填写比较数2的值。 |
使用范例:
MOVJ
LABEL *C1
其它指令1,MOVJ等
JUMP *C1 WHEN (I001==0)
其它指令2
> 6.10 UNTIL-直到
功能: UNTIL指令用于在一个运动过程中跳出。即在机器人的一个运动过程中暂停并开始下一个过程。当条件满足时,不论当前机器人是否运行,立即暂停并开始ENDUNTIL指令下面的一条指令。
UNTIL的判断条件为(比较数1 比较方式 比较数2),例如比较数1为2,比较数2为1,比较方式为">",则2>1,判断条件成立;若比较方式为"<"或"==",则判断条件不成立。
注意,插入UNTIL指令的同时会同时插入ENDUNTIL指令。若要删除UNTIL指令请同时删掉其对应的ENDUNTIL指令,否则会导致程序无法运行。
现在UNTIL支持多条件判断按顺序判断,有括号的优先判断括号内的再于括号外的进行判断,最多支持5个判断条件。
参数说明:
| 参数 | 说明 |
|---|---|
| 参数类型 | 比较数1的类型,变量或数字、模拟量的输入值。 |
| 参数名 | 若参数类型选择的类型为变量(INT、DOUBLE、BOOL、GINT、GDOUBLE、GBOOL),则此处为比较数1的变量名。 若参数类型选择的类型为输入值(DIN、AIN),则此处为数字输入或模拟输入的端口号。 |
| 比较方式 | == 等于 < 小于 > 大于 <= 小于或等于 >= 大于或等于 != 不等于 |
| 变量值来源 | 比较数2的类型,自定义或变量或数字、模拟量的输入值。 |
| 新参数 | 若变量值来源选择的类型为自定义,则此处不可选; 若变量值来源选择的类型为变量(INT、DOUBLE、BOOL、GINT、GDOUBLE、GBOOL),则此处为比较数1的变量名; 若变量值来源选择的类型为输入值(DIN、AIN),则此处为数字输入或模拟输入的端口号。 |
| 来源参数 | 若变量值来源处选择的为自定义,则在此处直接填写比较数2的值。 |
使用范例:
UNTIL (GI001<2)
其它指令
ENDUNTIL
MOVJ
> 6.11 CRAFTLINE-工艺跳行
功能: 专用工艺指令,程序中运行该指令后,在专用工艺界面会跳转到对应的行数。
参数说明: 新参数:专用工艺界面中对应的行数。
使用范例:
CRAFTLINE 22
> 6.12 CMDNOTE-注释指令
功能: 指令注释,可以使用该指令在程序适当位置添加注释,便于调试。
如果插入了一条注释指令在单步运行这条指令时会跳到下一行指令运行,不会有报错提示。
参数说明: 注释内容:注释的内容支持中英文,支持大小写,支持数字输入和支持符号输入。
使用范例:
##iINEXBOT$$;含义:注释内容为"INEXBOT"。
> 6.13 POS_REACHABLE-是否可达判断
功能: 到达判断指令,用于判断目标点是否能到达,点位能够到达变量置1,不能到达置0。
参数说明:
| 参数 | 说明 |
|---|---|
| 位置变量名 | 可选择P点、G点。 |
| 运动类型 | 可选择MOVJ、MOVL。 |
| 状态存入变量类型 | 可存入BOOL、GBOOL。 |
| 状态存入变量名 | BOOL、GBOOL变量名称。 |
使用范例:
POS_REACHABLE MOVJ P001 B001;含义:计算能否使用MOVJ插补运行到P001位置,可以到达B001值为1,不可以到达B001值为0。
> 6.14 CLKSTART-计时开始
功能: CLKSTART指令用于计时。运行该指令开始计时,并将时间记录到一个局部或者全局DOUBLE变量中。计时指令的精度为小数点后两位(即10ms,误差±2ms)。
参数说明:
| 参数 | 说明 |
|---|---|
| 序号 | 计时器的序号,可以同时使用32个计时器分别计时。 |
| 存入变量类型 | 将计时的时间存入到局部DOUBLE变量或者全局的GDOUBLE变量。 |
| 存入变量名 | 将时间存入的变量的变量名。 |
使用范例:
CLKSTART ID = 1 D001;(含义:工艺号1开始计时,计时结果存入D001)
> 6.15 CLKSTOP-计时停止
功能: CLKSTOP指令用于停止对应序号的计时器计时。停止后已存入变量的值不会归零。
参数说明:
| 参数 | 说明 |
|---|---|
| 序号 | 要停止计时的计时器的序号。 |
使用范例:
CLKSTOP ID=1;(含义:工艺号1计时停止)
> 6.16 CLKRESET-计时复位
功能: CLKRESET指令用于将对应序号的计时器归零。若没有使用该指令,下次运行CLKSTART指令会累积计时。
参数说明:
| 参数 | 说明 |
|---|---|
| 序号 | 要归零计时的计时器的序号。 |
使用范例:
CLKRESET ID=1;含义:重置工艺号1计时结果。
> 6.17 READLINEAR-读取线速度
功能: 将机器人线速度实时读取到变量中。
参数说明:
| 参数 | 说明 |
|---|---|
| 变量类型 | 存入变量的类型,可选GINT/GDOUBLE。 |
| 变量名 | 存入变量的名。 |
使用范例:
READLINEAR GDOO1
> 6.18 CALL_LUASTRING-调用Lua语句
功能: 通过调用Lua语句来实现相应的功能或操作。
参数说明:
| 参数 | 说明 |
|---|---|
| 语句 | 要输入的Lua语句。 |
| 更多 | 手填和变量 • 手填:自己输入相应且正确的Lua语句可以直接单步或运行 • 变量:把Lua语句写到字符串(string)变量中,通过调用相应的字符串变量来实现其功能 |
使用范例:
CALL_LUASTRING [语句]
或者 CALL_LUASTRING 字符串变量
> 6.19 WAIT_POS-等待运动到点
功能: MOV指令执行结束并不代表伺服运行结束,仅为点位下发结束,此指令等待伺服电机运行精准到点,再执行下一个指令。
参数说明:
| 参数 | 说明 |
|---|---|
| 位置/速度 | 等到运动到点的参数。 |
| 精度 | 判断是否到点的参考;例:数值为0.1,只要点位下发完成等待【设定的时间】开始判断是否到点。 |
| 最小等待时间 | 不管有没有运动到指定点位,这个时间都要等待。 |
| 最大等待时间 | 如果等待时间超过了此时间,机器人还没有运动到点的话,就会报错。 |
使用范例:
NOP
MOVL P0001 V=10mm/s PL=0 ACC=1 DEC=1 0
MOVL P0002 V=10mm/s PL=0 ACC=1 DEC=1 0
MOVL P0003 V=10mm/s PL=0 ACC=1 DEC=1 0
WAIT_POS
TIMER T=2
END
示例说明:当第4行指令运行结束后,表示点位的运行结束,第5行指令运行结束表示伺服运行结束,伺服运动到点后开始执行延时指令。
7. 变量类
> 7.1 SET-赋值
注: 定义该变量直接到局部变量界面操作即可,以取消该指令。
功能: 定义局部整型、浮点、布尔变量,并同时赋值。
参数说明:
| 参数 | 说明 |
|---|---|
| 变量 | 点击更多可以选择需要的变量类型。 |
| 变量值来源 | 给上面的变量赋值,可以手填可以选择更多中的变量类型。 |
使用范例:
INT I001 = 11
INT I002 = GI003
> 7.2 FORCESET-写入文件
功能: 在程序运行过程中,所有的计算、赋值操作均是对缓存中的数值进行更改的,并不会存入系统文件中,即当程序运行停止后所有全局变量的值都会还原。若要强制将内容中的全局数值变量写入文件中,则可以使用FORCESET指令。
参数说明:
| 参数 | 说明 |
|---|---|
| 变量名 | 点击更多选择要强制写入文件的变量名。 |
使用范例:
FORCESET GI001
8. 字符串类
> 8.1 STRING-SPELL-字符串追加
功能: 在原有字符串的变量或者空字符串的变量中加入你需要的字符,就构成了一个新的字符串变量。
参数说明:
| 参数 | 说明 |
|---|---|
| 变量 | 变量类型及名称。 |
| 变量值 | 常数或绑定其他变量。 |
使用范例:
STRING_SPELL [S001 + S002]
> 8.2 STRING-SLICE-字符串索引截取
功能: 截取一个字符串变量中的其中一部分字符串,并把这部分字符串存到指定的变量里。
参数说明:
| 参数 | 说明 |
|---|---|
| 变量 | 被提取的字符串变量名。 |
| 起始索引 | 起始索引的位置。 |
| 结束索引 | 结束索引的位置。 |
| 变量值 | 截取的数据存放的位置。 |
使用范例:
STRING_SLICE S001 (I001,I001) S001 I001
> 8.3 STRING-SPLIT-字符串分隔符拆分
功能: 用字符串变量中的其中一个字符拆分变量中的字符串,并把拆分的字符依次存放到指定变量中。
参数说明:
| 参数 | 说明 |
|---|---|
| 变量 | 搜索字符串所在的参数。 |
| 分隔符 | 分隔符的类型。 |
| 数据存放的首个变量 | 查询的数据依次存放的首位置。 |
| 数据存放数 | 记录提取数据的数量。 |
使用范例:
STRING_SPLIT S001 (I001,I001) S001 I001
> 8.4 STRING-LOCATE-字符串定位查询
功能: 查询一个字符串变量里面的一种字符所在的位置,并把位置和数量依次存到指定变量中。
参数说明:
| 参数 | 说明 |
|---|---|
| 变量 | 搜索字符串所在的参数。 |
| 待索引变量 | 需要搜索的字符。 |
| 数据存放的首个变量 | 查询的数据依次存放的首位置。 |
| 数据存放数 | 记录提取数据的数量。 |
使用范例:
STRING_LOCATE S001 S002 I001 0
> 8.5 STRING-LENGTH-字符串长度
功能: 计算一个字符串变量中字符串的长度,并把计算的长度数存放到指定变量。
参数说明:
| 参数 | 说明 |
|---|---|
| 变量 | 待计算长度的变量。 |
| 数据存放的变量 | 记录提取数据的数量。 |
使用范例:
STRING_LENGTH S001 I001
> 8.6 STRING-TO-字符串转非字符串
功能: 把一个字符串变量中的字符串转换成非字符串。
参数说明:
| 参数 | 说明 |
|---|---|
| 字符串变量 | 需要转译的字符串。 |
| 非字符串变量 | 转译的目标变量。 |
使用范例:
STRING_TO S001 I001
> 8.7 TO-STRING-非字符串转字符串
功能: 把一个非字符串变量中的变量转换成字符串。
参数说明:
| 参数 | 说明 |
|---|---|
| 非字符串变量 | 需要转译的变量。 |
| 字符串变量 | 转译的目标变量。 |
使用范例:
TO_STRING I001 S001
9. 坐标切换类
> 9.1 SWITCHTOOL-切换工具手
功能: 在程序运行中切换当前使用的工具手坐标系。
参数说明:
| 参数 | 说明 |
|---|---|
| 工具坐标 | 要切换到的工具手坐标系的工具号。 |
使用范例:
SWITCHTOOL (3)
> 9.2 SWITCHUSER-切换用户坐标
功能: 在程序运行中切换当前使用的用户坐标系。
参数说明:
| 参数 | 说明 |
|---|---|
| 用户坐标 | 要切换到的用户坐标系的序号。 |
使用范例:
SWITCHUSER (3)
> 9.3 USERCOORD_TRANS-用户坐标转换
功能: 将B、C用户坐标系叠加(×),结果置入A用户坐标系。
参数说明:
| 参数 | 说明 |
|---|---|
| 用户坐标A | 结果存入该用户坐标系,这里是用户坐标系序号。 |
| 用户坐标B | 用户坐标系序号。 |
| 用户坐标C | 用户坐标系序号。 |
使用范例:
USERCOORD_TRANS (1) (2) (3)
> 9.4 SWITCHSYNC-切换外部轴
功能: 在程序运行中切换当前使用的外部轴。
参数说明:
| 参数 | 说明 |
|---|---|
| 外部轴组号 | 要切换到的外部轴的组号。 |
使用范例:
SWITCHSYNC 1
10. 网络通讯类
> 10.1 SENDMSG-发送数据
功能: 向另外一个网络设备发送字符串信息。
参数说明:
| 参数 | 说明 |
|---|---|
| ID | 设置-网络设置界面中的工艺号。 |
| 发送字符 | 要发送的字符串。若要发送变量,则在变量前加入$。若要发送字符,则需要两个$。支持转义符与格式化输出。 |
使用范例:
SENDMSG ID = 1 #$D001#
> 10.2 PARSEMSG-解析数据
功能: 解析另外一台网络设备通过TCP发送的数据,并将数据存入多个变量中。
当有TCP接收到多位数值时,会将数值分别存入多个变量中,所使用的变量分别为第一位变量、第一位变量往下顺延。即,若发来3位数值,A、B、C,设置的第一位变量名为GI006,则将A存入GI006,B存入GI007,C存入GI008。
参数说明:
| 参数 | 说明 |
|---|---|
| ID | 设置-网络设置界面中的工艺号。 |
| 数据存放的首个变量(第一位变量类型) | 存入第一位变量的类型,点击更多选择变量类型。 |
| 解析后清除缓存区 | 解析数据后清空缓存的数据。 |
| 数据存放数 | 通过变量记录提取数据的数量。 |
| 第一位变量名 | 存入第一位变量的变量名。 |
使用范例:
PARSEMSG ID = 1 GI006 CLEARCAHE = 0;含义:把接收到的数据存到变量GI001中,解析完成后清除缓存的数据
> 10.3 READCOMM-读取数据
功能: 读取以太网或Modbus发送的点位存到位置变量中、个数存到数值变量中。
参数说明:
| 参数 | 说明 |
|---|---|
| 工艺号 | 要打开通讯的网络通讯的工艺号。 |
| 通讯方式 | 使用以太网通讯或者Modbus通讯。 |
| 位置变量类型 | 可选全局位置变量、局部位置变量。 |
| 位置变量名 | 位置变量名;存接收到的点位,多个点位位置变量顺延,例如指令位置变量填GP003,接收3个点位,则分别存到GP003、GP004、GP005。 |
| 变量类型 | 可选全局整型、局部整型。 |
| 变量名 | 变量名;存接收到点位的数量。 注:目前仅Modbus可用。 |
使用范例:
READCOOM ID=1 EHTERNET TO G001 I001
> 10.4 OPENMSG-打开数据
功能: 打开网络通讯。
参数说明:
| 参数 | 说明 |
|---|---|
| ID | 设置-网络设置界面中的工艺号。 |
使用范例:
OPENMSG ID = 1
> 10.5 CLOSEMSG-关闭数据
功能: 关闭网络通讯。
参数说明:
| 参数 | 说明 |
|---|---|
| ID | 设置-网络设置界面中的工艺号。 |
使用范例:
CLOSEMSG ID = 2
> 10.6 PRINTMSG-输出信息
功能: 通过提示条的方式打印字符串。
参数说明:
| 参数 | 说明 |
|---|---|
| 输出字符 | 要打印的字符串。若要打印变量,则在变量前加入$。若要打印字符,则需要两个$。支持转义符与格式化输出。 |
使用范例:
PRINTMSG #this is $D001#
> 10.7 MSG_CONNECTION_STATUS-获取信息连接状态
功能: 获取网络设置里某个工艺号的连接状态。
参数说明:
| 参数 | 说明 |
|---|---|
| 工艺号 | 需要知道的网络设置的工艺号。 |
| 状态存入变量名 | 点击更多选择BOOL/GBOOL类型存入。 |
使用范例:
MSG_CONN_ST 1 B001
11. 位置变量类
注意: 以下指令中位置变量类型新增的变量可参考运动控制类部分的绑定变量说明。
> 11.1 USERFRAME_SET-用户坐标修改
功能: 改变用户坐标系某一轴的值。
参数说明:
| 参数 | 说明 |
|---|---|
| 用户坐标编号 | 要改变值的用户坐标编号。 |
| 用户坐标参数 | 要改变值的用户坐标轴。 |
| 变量类型 | 可以选择手填值或其他变量。 |
| 变量名 | 当选择其他变量时,在这里选择变量名,会将该变量的值赋给用户坐标对应的坐标轴。 |
| 手填值 | 当变量类型选择手填值时,在这里直接填入要改变的目标值。 |
使用范例:
USERFRAME_SET ID = 1 UX GI001
USERFRAME_SET ID = 2 UY 99
> 11.2 TOOLFRAME_SET-工具坐标修改
功能: 改变工具坐标系某一轴的值。
参数说明:
| 参数 | 说明 |
|---|---|
| 工具坐标编号 | 要改变值的工具坐标编号。 |
| 工具坐标参数 | 要改变值的工具坐标轴。 |
| 变量类型 | 可以选择手填值或其他变量。 |
| 变量名 | 当选择其他变量时,在这里选择变量名,会将该变量的值赋给用户坐标对应的坐标轴。 |
| 手填值 | 当变量类型选择手填值时,在这里直接填入要改变的目标值。 |
使用范例:
TOOLFRAME_SET ID = 1 TX GI001;含义:把工具手1的X轴偏移参数改为GI001的变量值
TOOLFRAME_SET ID = 2 TY 99;含义:把工具手2的X轴偏移参数改为99
> 11.3 READPOS-读取点位
功能: 将一个位置变量的某个轴的值读入到一个浮点型变量中。
参数说明:
| 参数 | 说明 |
|---|---|
| 变量类型 | 要读入的浮点型变量类型,局部或全局。 |
| 变量名 | 要读入的浮点型变量的变量名。 |
| 位置变量类型 | 要读取的位置变量类型,当前位置、局部位置变量或全局位置变量。 |
| 位置变量名 | 当位置变量类型选择局部位置变量或全局位置变量,这里选择对应的变量名。若选择P$INT、P$GINT、G$INT、G$GINT,在这里选择对应的整型变量名。例选择P$INT,变量名I001,I001=33,则得到的位置变量为P033。 |
| 位置变量坐标系 | 要读取的位置变量值所在的坐标系。 |
| 位置变量轴 | 要读取的位置值在对应坐标系下的轴。 |
使用范例:
READPOS GD004 P$GI003 RF 1
> 11.4 POSADD-点位加
功能: 位置变量加法运算(+),该指令能够对位置变量(全局、局部)单一轴的值进行加法运算,然后再赋值给该轴。
参数说明:
| 参数 | 说明 |
|---|---|
| 位置变量类型 | 要改变的位置变量的类型,局部或全局。 |
| 位置变量名 | 要改变的位置变量的变量名。 |
| 位置变量坐标系 | 要改变位置变量轴所对应的的坐标系。 |
| 位置变量轴 | 要改变位置变量在对应坐标系下的轴。 |
| 变量类型 | 可以选择手填值或其他变量。 |
| 数值变量名 | 当选择其他变量时,在这里选择变量名,会将该变量的值加上位置变量对应轴的值,再赋值给该位置变量。 |
| 手填值 | 当变量类型选择手填值时,在这里直接填入目标值,会将该值加上位置变量对应轴的值,再赋值给该位置变量。 |
使用范例:
POSADD P0001 RF 1 788
> 11.5 POSSUB-点位减
功能: 位置变量减法运算(-),该指令能够对位置变量(全局、局部)单一轴的值进行减法运算,然后再赋值给该轴。
参数说明:
| 参数 | 说明 |
|---|---|
| 位置变量类型 | 要改变的位置变量的类型,局部或全局。 |
| 位置变量名 | 要改变的位置变量的变量名。 |
| 位置变量坐标系 | 要改变位置变量轴所对应的的坐标系。 |
| 位置变量轴 | 要改变位置变量在对应坐标系下的轴。 |
| 变量类型 | 可以选择手填值或其他变量。 |
| 数值变量名 | 当选择其他变量时,在这里选择变量名,会将位置变量对应轴的值减去该变量的值,再赋值给该位置变量。 |
| 手填值 | 当变量类型选择手填值时,在这里直接填入目标值,会将位置变量对应轴的值减去该值,再赋值给该位置变量。 |
使用范例:
POSSUB P0001 RF 1 88
> 11.6 POSSET-点位改
功能: 该指令能够对位置变量(全局、局部)单一轴的值进行修改。
参数说明:
| 参数 | 说明 |
|---|---|
| 位置变量类型 | 要改变的位置变量的类型,局部或全局。 |
| 位置变量名 | 要改变的位置变量的变量名。 |
| 位置变量坐标系 | 要改变位置变量轴所对应的的坐标系。 |
| 位置变量轴 | 要改变位置变量在对应坐标系下的轴。 |
| 变量类型 | 可以选择手填值或其他变量。 |
| 数值变量名 | 当选择其他变量时,在这里选择变量名,会将位置变量对应轴的值赋值给该位置变量。 |
| 手填值 | 当变量类型选择手填值时,在这里直接填入目标值,会将位置变量对应轴的值赋值给该位置变量。 |
使用范例:
POSSET P0001 RF 1 88
> 11.7 COPYPOS-复制点位
功能: 将一个位置变量所有轴的值复制到另一个位置变量中。
参数说明:
| 参数 | 说明 |
|---|---|
| 源位置变量类型 | 要读取值的位置变量的类型。可以选择当前位置,既将当前机器人位置赋值给另一个位置变量。 |
| 源位置变量名 | 要读取值的位置变量的变量名。 |
| 目标位置变量类型 | 被赋值的位置变量的变量类型。 |
| 目标位置变量名 | 被赋值的位置变量的变量名。 |
使用范例:
COPYPOS G003 TO P001
COPYPOS CURPOST TO P002
> 11.8 POSADDALL-点位全加
功能: 位置变量加法运算(+),该指令能够对位置变量(全局、局部)若干轴的值进行加法运算,然后再赋值给该轴。
参数说明:
| 参数 | 说明 |
|---|---|
| 位置变量类型 | 要改变的位置变量的类型,局部或全局。 |
| 位置变量名 | 要改变的位置变量的变量名。 |
| 位置变量坐标系 | 要改变位置变量轴所对应的的坐标系。 |
| 更多 | 可以选择手填值或其他变量。 1. 数值变量名:当选择其他变量时,在这里选择变量名,会将位置变量对应轴的值加上该变量的值,再赋值给该位置变量。 2. 手填值:当变量类型选择手填值时,在这里直接填入目标值,会将位置变量对应轴的值加上该值,再赋值给该位置变量。 |
使用范例:
POSADDALL GP0001 RF I001 GI001 D001 GD001 10.1 10
> 11.9 POSSUBALL-点位全减
功能: 位置变量减法运算(-),该指令能够对位置变量(全局、局部)若干轴的值进行减法运算,然后再赋值给该轴。
参数说明:
| 参数 | 说明 |
|---|---|
| 位置变量类型 | 要改变的位置变量的类型,局部或全局。 |
| 位置变量名 | 要改变的位置变量的变量名。 |
| 位置变量坐标系 | 要改变位置变量轴所对应的的坐标系。 |
| 更多 | 可以选择手填值或其他变量。 1. 数值变量名:当选择其他变量时,在这里选择变量名,会将位置变量对应轴的值减去该变量的值,再赋值给该位置变量。 2. 手填值:当变量类型选择手填值时,在这里直接填入目标值,会将位置变量对应轴的值减去该值,再赋值给该位置变量。 |
使用范例:
POSSUBALL GP0001 RF I001 GI001 D001 GD001 10.1 10
> 11.10 POSSETALL-点位全改
功能: 该指令能够对位置变量(全局、局部)若干轴的值进行修改。
参数说明:
| 参数 | 说明 |
|---|---|
| 位置变量类型 | 要改变的位置变量的类型,局部或全局。 |
| 位置变量名 | 要改变的位置变量的变量名。 |
| 位置变量坐标系 | 要改变位置变量轴所对应的的坐标系。 |
| 更多 | 可以选择手填值或其他变量。 1. 数值变量名:当选择其他变量时,在这里选择变量名,会将位置变量对应轴的值赋值给该位置变量。 2. 手填值:当变量类型选择手填值时,在这里直接填入目标值,会将位置变量对应轴的值赋值给该位置变量。 |
使用范例:
POSSETALL GP0001 RF I001 GI001 D001 GD001 10.1 10
> 11.11 TOFFSETON-轨迹偏移开始
功能: 该指令能够对机器人的运行轨迹进行实时偏移。
参数说明:
| 参数 | 说明 |
|---|---|
| 偏移坐标系 | 要改变运行轨迹所对应的的坐标系。 |
| 偏移量类型 | 可以选择手填值或其他变量类型。 |
| 偏移量 | 当变量类型选择手填值时,在这里直接填入目标值,会将机器人的轨迹坐标加上这个手填值。 |
| 更多 | 可以选择手填值或其他变量。 1. 数值变量名:当选择其他变量时,在这里选择变量名,会将位置变量对应轴的值赋值给该位置变量。 2. 手填值:当变量类型选择手填值时,在这里直接填入目标值,会将位置变量对应轴的值赋值给该位置变量。 |
使用范例:
TOFFSETON RF GI001 I002 2 3 4 5
> 11.12 TOFFSETOFF-轨迹偏移结束
功能: 轨迹偏移结束,此后的运动轨迹不再偏移。
使用范例:
TOFFSETOFF
> 11.13 READPOSMSG-读取点位信息
功能: 将点位工具号、用户坐标号、坐标系、姿态角度/弧度、形态信息的值读入到一个整型变量中。
参数说明:
| 参数 | 说明 |
|---|---|
| 变量类型 | 可选择全局位置变量和局部位置变量。 |
| 变量名 | 位置变量的名称。 |
| 信息 | 工具号/用户坐标号/坐标系/角度/弧度/形态。 |
| 更多(目标变量类型) | 被读取的位置变量的变量类型。 |
| 目标变量名 | 被读取的位置变量的变量名称。 |
使用范例:
READPOSMSG P0001 TOOL I001
> 11.14 POS_STRETCH-点位拉伸
功能: 将直线,圆弧两端的长度缩短或者加长,改变圆弧中间点可以将圆弧轨迹改变。
参数说明:
| 参数 | 说明 |
|---|---|
| 拉伸类型 | 支持直线或圆弧指令拉伸。 |
| 起点 | 直线或圆弧指令的起点。 |
| 圆弧中间点 | 圆弧指令中间点。 |
| 终点 | 直线或圆弧指令的终点。 |
| 起点偏移 | 起点点位缩短或拉伸的距离。 |
| 终点偏移 | 终点点位缩短或拉伸的距离。 |
| 输出起点位置 | 将拉伸后的起点点位保存在局部点位或全局点位中。 |
| 输出终点位置 | 将拉伸后的终点点位保存在局部点位或全局点位中。 |
使用范例:
POS_STRETCH LINE P0001 P0002 10 10 P0004 P0005
> 11.15 SETPOSMSG-设置点位信息
功能: 设置点位的坐标系、角度/弧度、形态、工具号、用户坐标号。
参数说明:
| 参数 | 说明 |
|---|---|
| 变量类型 | 可选择全局位置变量和局部位置变量。 |
| 坐标系 | 通过局部整型变量、全局整型变量、不变设值坐标系号。 |
| 角度/弧度 | 通过局部整型变量、全局整型变量、不变设置角度/弧度。 |
| 形态 | 通过局部整型变量、全局整型变量、不变设置形态。 |
| 工具号 | 通过局部整型变量、全局整型变量、不变设置工具号。 |
| 用户坐标号 | 通过局部整型变量、全局整型变量、不变设置用户坐标号。 |
使用范例:
SETPOSMSG P0001 1 1 1 1 1 1
12. 程序控制类
> 12.1 PTHREAD_START-开启线程
功能: 开启后台任务。后台任务执行一次即结束。若要编辑后台任务,请到设置-后台任务界面进行编程,局部后台任务会同步主程序的停止和运行,全局后台不会。
参数说明:
| 参数 | 说明 |
|---|---|
| 类型 | 选择局部后台或全局后台 |
| 后台任务 | 后台任务名。 |
使用范例:
PTHREAD_START [TTT]
> 12.2 PTHREAD_END-退出线程
功能: 关闭已开启的后台任务。
参数说明:
| 参数 | 说明 |
|---|---|
| 类型 | 选择局部后台或全局后台。 |
| 后台任务 | 后台任务名。 |
使用范例:
PTHREAD_END [TTT]
> 12.3 PAUSERUN-暂停运行
功能: 暂停程序运行。
参数说明:
| 参数 | 说明 |
|---|---|
| 类型 | 要暂停的程序类型,包括全部、主程序、后台程序。 |
| 程序 | 要暂停的程序名。 |
使用范例:
PAUSERUN [TTT]
PAUSERUN MAIN
PAUSERUN ALL
> 12.4 CONTINUERUN-继续运行
功能: 继续运行已暂停的程序(已停止的程序不能继续)。
参数说明:
| 参数 | 说明 |
|---|---|
| 类型 | 要继续运行的程序类型,包括主程序、局部后台程序。 |
| 程序 | 要继续运行的程序名。 |
使用范例:
CONTINUERUN [TTT]
CONTINUERUN MAIN
> 12.5 STOPRUN-停止运行
功能: 停止运行所有程序。
Q&A
Q: 什么是绑定变量?
A: 绑定变量是将位置变量与整型变量关联起来的方法。通过将整型变量赋值,可以动态引用不同的位置变量。例如当I001=2时,P$I001相当于P0002。
Q: MOVJ和MOVL指令有什么区别?
A: MOVJ使用关节插补方式,机器人在空间内以最快的速度运行,不受轨迹约束。MOVL使用直线插补方式,机器人末端以直线运动到目标点。
Q: 如何在程序中实现条件判断?
A: 使用IF指令来实现条件判断。IF指令的条件满足时执行IF与ENDIF之间的指令,否则跳转到ENDIF继续运行。可搭配ELSEIF和ELSE指令使用。
Q: IF指令可以进行多条件判断吗?
A: 可以,IF指令支持多条件判断按顺序判断。有括号的优先判断括号内的再于括号外的进行判断,最多支持5个判断条件。
Q: 程序的开头为IF且最后一行为ENDIF时需要注意什么?
A: 请在IF指令上方或ENDIF下方插入一条0.1秒的TIMER(延时)指令,否则当IF指令的条件不满足时会导致程序陷入死机状态。
Q: CALL指令的作用是什么?
A: CALL指令用于调用另一个程序。被调用的程序运行完后则返回原程序CALL指令的下一行继续运行。
Q: 如何调用Lua文件?
A: 使用CALL_LUAFILE指令调用从upgrade中上传的Lua文件。需要指定Lua文件名称、传入参数和输出参数。
Q: WHILE循环指令有什么限制吗?
A: 使用WHILE指令进行循环时,循环条件必须在事件发生时才会真正改变,否则会陷入死循环。需要避免程序陷入死机状态。
Q: 如何使用TIMER指令实现延时?
A: TIMER指令可以实现程序的延时功能。参数值为整数,单位为秒。例如TIMER 2表示延时2秒。
Q: 位置变量的坐标系有哪些选项?
A: 位置变量的坐标系包括基座坐标系(RF)、工具坐标系(TF)、用户坐标系(UF)、沿着视线方向的坐标系(VF)等多种选项。
Q: READPOS指令的用途是什么?
A: READPOS指令用于将一个位置变量的某个轴的值读入到一个浮点型变量中。需要指定源位置变量和目标变量。
Q: 如何修改位置变量的值?
A: 可以使用POSSET指令修改位置变量单一轴的值,或使用POSSETALL指令修改位置变量若干轴的值。
Q: POSADD和POSSUB指令的区别是什么?
A: POSADD指令对位置变量进行加法运算,POSSUB指令对位置变量进行减法运算。两者都能对位置变量的单一轴进行运算。
Q: 轨迹偏移功能如何使用?
A: 使用TOFFSETON指令开始轨迹偏移,指定偏移坐标系和偏移量。使用TOFFSETOFF指令结束轨迹偏移,结束后的运动轨迹不再偏移。
Q: 什么是INT和DOUBLE类型变量?
A: INT是整型变量,可以存储整数值。DOUBLE是浮点型变量,可以存储小数值。还可以使用全局版本GINT和GDOUBLE。
Q: IO操作包括哪些指令?
A: IO操作包括DOUT(数字输出)、AOUT(模拟输出)、POUT(脉冲输出)等指令用于输出,以及DIN、AIN、PIN等用于读取输入状态。