Appearance
机器人自动标定系统 NexAutoCali
NexAutoCali 是纳博特科技自主研发的机器人自动标定系统,集成激光跟踪仪测量、机器人运动控制、校准点自动规划、算法计算于一体,实现从测量点自动规划到自动运行、自动测量的全流程自动化。
产品特点
全参标定
全参标定是当前将机器人理论模型与物理实体进行高保真对齐的最优解,能挖掘出设备自身的精度极限。
以某柔性臂测试为例,由纳博特自动标定系统进行全参标定后将 TCP 精度从 3mm 提升至 0.5mm,提升了 500%。
快速
- 精简操作逻辑,降低培训与使用难度
- 快装结构设计,5 分钟即可完成软硬件环境准备
- 优化标定流程,做一次 50 点标定的标准耗时 <5 分钟
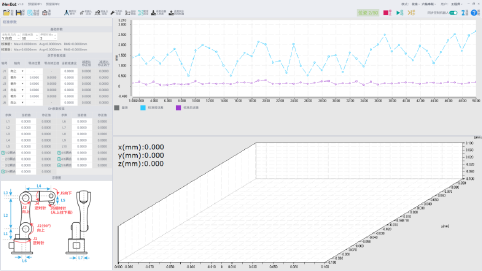
可视化
采用多种图标展示实时的坐标位置、轨迹位置、多轮测试的重复误差等特性,提高了使用的便捷性。
全自动
依托纳博特驱控优势,打通从测量点自动规划、自动运行、自动测量的全流程自动化流程,使用便捷性、可靠性大幅提升。
高集成
系统集成测量点规划、轨迹规划、运动控制、机器人参数读写于一体,一套软件可以完成校准、测量全部工作。
全功能
- 内置机器人校准模块:支持减速比校准、零点校准、杆长校准以及全参标定
- 内置 14 项机器人性能指标测试模块
- 完全符合国标 GB/T 12642—2013 / ISO 9283:1998(不区分版本),提供全量包
机型 / 跟踪仪高兼容性
适配七轴协作、六轴工业、六轴协作机型等重要工业应用机型,也可根据用户需求提供适配机型定制。并已适配 API 与中图仪器的多款激光跟踪仪器。
高测量准确性
通过联合使用 API、中图仪器等高精度激光追踪仪,该系统能够准确测量本体实际误差,校准前后的绕点,精度误差可提高 3 倍。
主要功能
高集成一体机系统
本系统集成了激光跟踪仪测量、机器人运动控制、校准点/测量点自动规划、校准/测试过程全自动控制、算法计算于一体。搭配上激光跟踪仪的轻巧化设计和内置电源、内置 WiFi 功能,可完成快速作业,大大提高工作效率、降低使用门槛。

高灵活度
在满足简易使用的基础上,系统可对校准点数量、测试次数、负载、速度、停顿时间等进行自由配置,方便现场的测试需求。
运动控制模块
集成了机器人的位置规划和运动控制模块,测试过程中不再需要用户编程,所有操作都可在激光标定仪系统中完成,减少了用户的使用门槛、调试周期,大大提高了测试的稳定性及测试效率。
测量点生成与测试环境管理
系统可以自动连接机器人,读取机器人参数信息,并自动规划校准所需的测量点位位置。同时,系统内置了测试环境管理模块,可对机器人信息、控制系统信息、测试环境、测试仪器信息、负载信息、速度信息进行统一管理。测试报告支持对测试环境的导出。
已适配跟踪仪厂商
| 厂家 | 型号 |
|---|---|
| API | Radian Plus |
| API | Radian Pro |
| API | Radian Core |
更多跟踪仪品牌和型号持续适配中,如有需求请联系纳博特技术支持。
标定流程概览
连接机器人 → 读取参数 → 自动规划测量点 → 自动运行测试 → 数据采集 → 算法计算 → 生成标定结果- 连接配置:系统自动连接机器人控制器,读取机器人模型参数
- 测量规划:自动生成校准所需的测量点位置与运动轨迹
- 自动执行:激光跟踪仪自动追踪靶球,系统自动控制机器人运动至各测量点
- 数据处理:采集真实位置数据,通过全参标定算法计算误差补偿值
- 结果输出:生成标定报告,包含精度提升数据、校准前后对比