Appearance
法奥fr5适配
1. 文档概述
1.1 文档目的
本文档旨在详细介绍法奥fr5机器人的适配方案,包括机器人配置、末端连接器说明、指示灯状态、拖拽功能设置和点记录操作等内容,帮助用户正确配置和使用法奥fr5机器人的末端IO功能。
1.2 适用范围
适用于法奥fr5机器人的适配和功能配置。
1.3 术语定义
- 末端IO:机器人末端执行器上的输入输出接口
- 拖拽模式:通过外部触发信号使机器人进入可手动拖拽的模式
- 点记录:通过外部按钮记录并替换程序中的局部p点
- EC库文件:EtherCAT总线配置文件,用于识别伺服系统
2. 机器人配置
2.1 所需文件
| 文件 | 大小 | 上传时间 |
|---|---|---|
| C1102-66296-68820-rtl-24.03-6.0.9-20250408-110947.zip | 5.14 MB | 2025-04-08 13:32 |
| slaveTypeLib.json | 0.34 KB | 2025-04-08 14:27 |
| 法奥ec库文件.zip | 18.77 MB | 2025-04-08 14:33 |
| FrServoAsix-6-Fr_Cobot_Axle_Asix-1.xml | 129.81 KB | 2025-04-08 14:37 |
2.2 配置步骤
- 上传法奥对应EC库文件(未上传EC库无法识别到伺服)
- 升级适配好的控制器程序
- 上传slaveType文件
- 上传ENI文件
2.3 常见错误
如果报0003错误,是伺服库文件不对,需要重新上传伺服库文件。
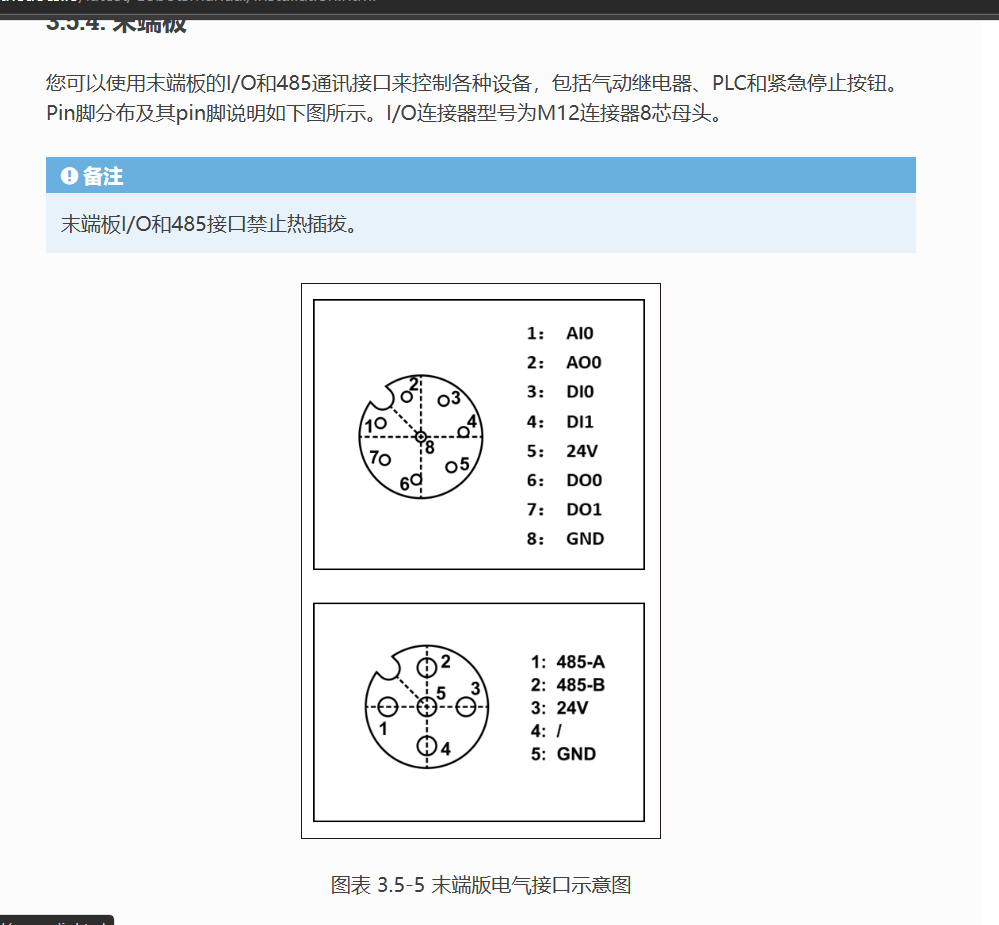
3. 末端连接器
3.1 连接器说明
末端8芯连接器提供以下IO接口:
- 2路IO输出
- 2路IO输入
- 1路模拟IO输出
- 1路模拟IO输入
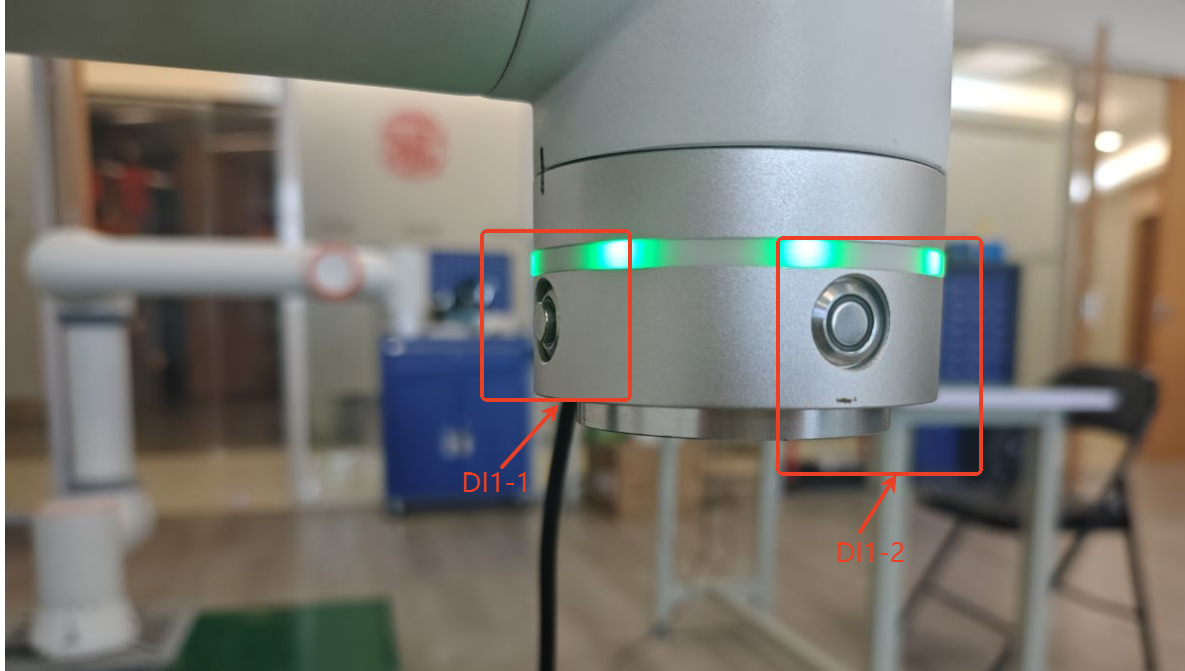
3.2 按钮功能定义
其中DI1-1是拖拽按钮,DI1-2是记录点位按钮。
4. 指示灯
| 功能 | LED颜色 |
|---|---|
| 运行模式 | 蓝色长亮 |
| 示教模式 | 绿色长亮 |
| 拖拽模式 | 白青色长亮 |
| 按钮盒记录点 | 紫色闪烁两下 |
| 开始运行程序或类似运动至此 | 蓝色闪烁两下 |
| 停止运行或运动到该点后 | 红色闪烁两下 |
| 报错 | 红色长亮 |
| 下电 | 黄色闪烁两下 |
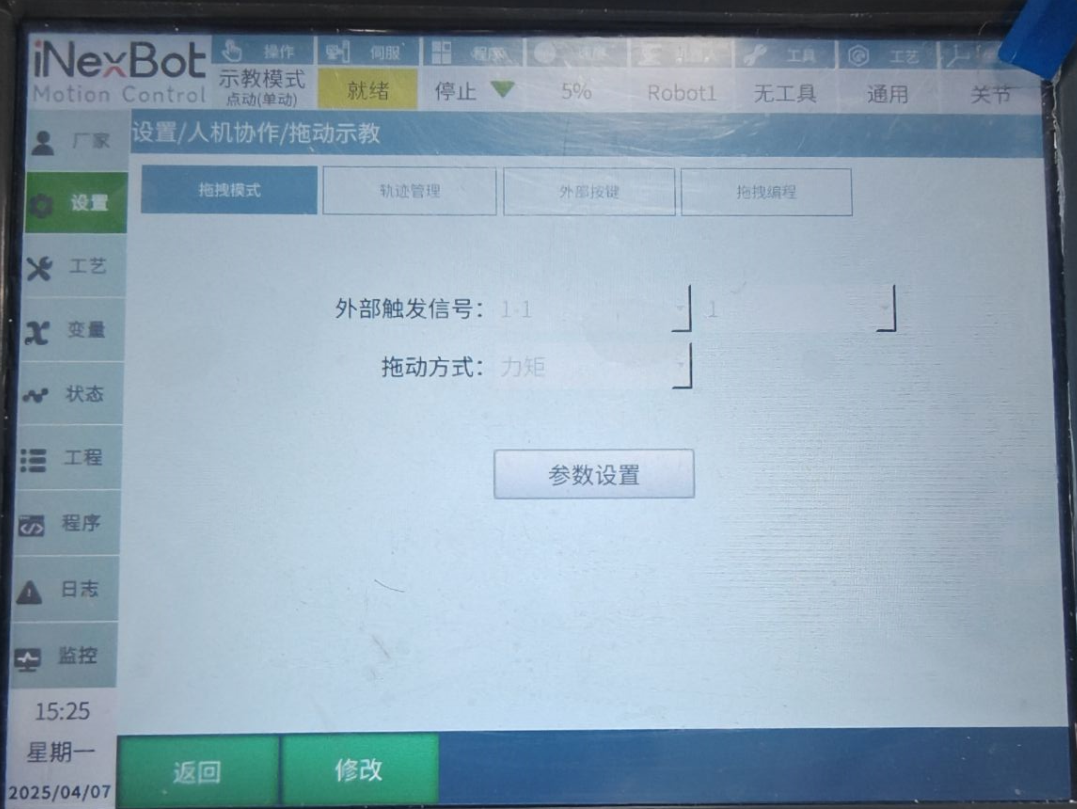
5. 末端拖拽
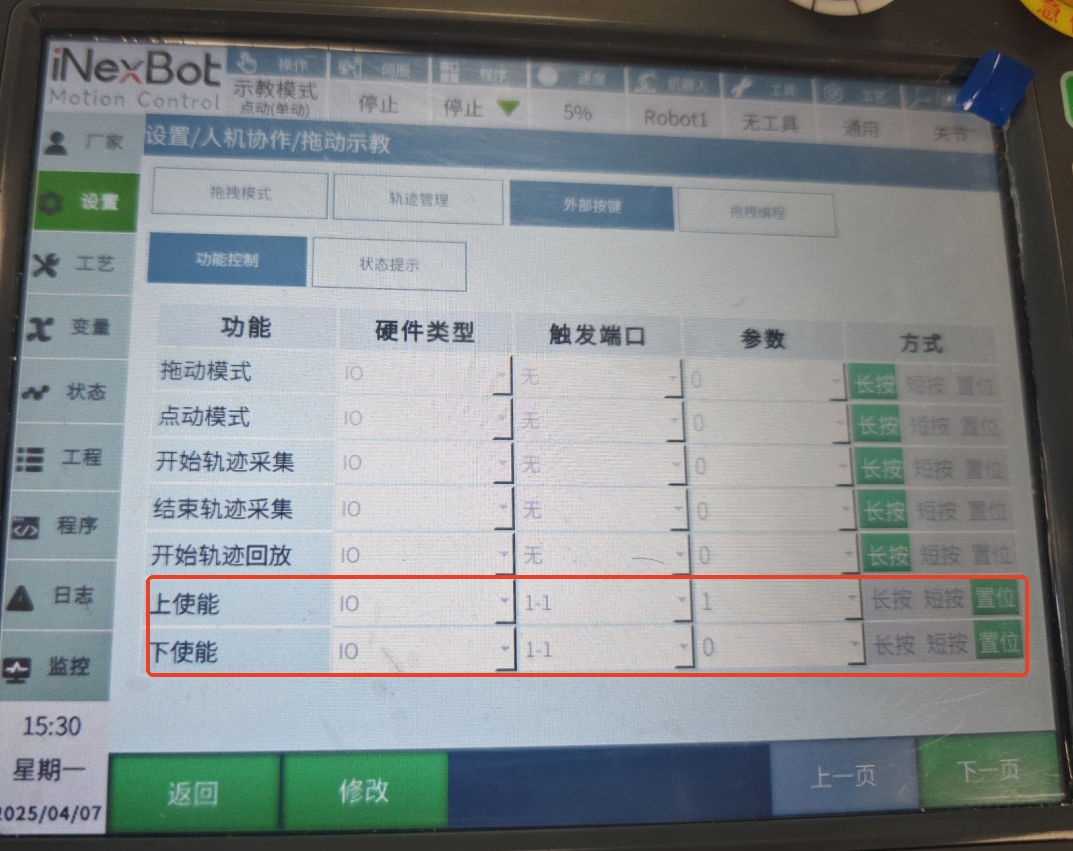
5.1 拖拽模式设置
设置外部触发信号为1-1,当1-1为1时就会进入拖拽模式。
5.2 使能设置
设置上使能和下使能触发端口为1-1,当1-1为1时候上电,为0的时候下电。
5.3 拖拽操作流程
- 完成机器人辨识
- 设置好所需3个触发端口
- 按下DI1-1按钮,机器人就会先切换至拖拽模式,然后上电,最后就可以进行拖拽
6. 点记录
6.1 点记录功能
点记录是通过点击机器人上外部按钮来记录并替换程序中局部p点。
6.2 使用条件
- 需要新建一个作业文件
- 作业文件中需存在局部p点
- 如果没有打开作业文件或作业文件当中不存在局部p点就会报错
- 作业文件只能在示教模式下记录点位
6.3 操作流程
- 在示教模式下打开包含局部p点的作业文件
- 点击点记录按钮(DI1-2),就会从第一个p点依次往后覆盖
- 记录超过设置的p点,就会重新从第一个p点开始覆盖
- 作业文件退出后,再次进入:
- 如果是相同作业文件,则累加记录
- 如果是不同的作业文件,就从头记录
7. 常见问题
7.1 法奥协作机器人上传EC库文件后仍然无法识别伺服
- 可能原因:EC库文件版本不匹配
- 解决方法:确认使用正确版本的EC库文件,重新上传并重启控制器
7.2 拖拽功能无法正常工作
- 可能原因:触发端口设置错误或机器人辨识未完成
- 解决方法:检查触发端口设置,确保机器人辨识已完成
7.3 点记录功能报错
- 可能原因:作业文件中没有局部p点或不在示教模式
- 解决方法:在示教模式下打开包含局部p点的作业文件
8. 版本历史
| 版本 | 日期 | 说明 |
|---|---|---|
| 1.0.0 | 2026-04-07 |
9. 相关资源
9.1 参考文档
- 《法奥机器人用户手册》
- 《EtherCAT配置指南》
9.2 相关技术文档
AI 检索专用问答对 (Q&A for Retrieval)
Q: 法奥FR5机器人配置需要哪些文件?
A: 需要上传以下文件:1. 法奥对应EC库文件;2. 适配好的控制器程序;3. slaveType文件;4. ENI文件。
Q: 法奥FR5机器人末端连接器提供哪些IO接口?
A: 末端8芯连接器提供以下IO接口:2路IO输出、2路IO输入、1路模拟IO输出、1路模拟IO输入。
Q: 法奥FR5机器人的拖拽功能如何设置?
A: 1. 设置外部触发信号为1-1,当1-1为1时就会进入拖拽模式; 2. 设置上使能和下使能触发端口为1-1,当1-1为1时候上电,为0的时候下电; 3. 完成机器人辨识; 4. 按下DI1-1按钮,机器人就会先切换至拖拽模式,然后上电,最后就可以进行拖拽。
Q: 法奥FR5机器人的点记录功能如何使用?
A: 1. 在示教模式下打开包含局部p点的作业文件; 2. 点击点记录按钮(DI1-2),就会从第一个p点依次往后覆盖; 3. 记录超过设置的p点,就会重新从第一个p点开始覆盖; 4. 作业文件退出后,再次进入:如果是相同作业文件,则累加记录;如果是不同的作业文件,就从头记录。
Q: 法奥FR5机器人上传EC库文件后仍然无法识别伺服怎么办?
A: 可能原因是EC库文件版本不匹配,解决方法是确认使用正确版本的EC库文件,重新上传并重启控制器。
Q: 法奥FR5机器人的拖拽功能无法正常工作怎么办?
A: 可能原因是触发端口设置错误或机器人辨识未完成,解决方法是检查触发端口设置,确保机器人辨识已完成。
Q: 法奥FR5机器人的点记录功能报错怎么办?
A: 可能原因是作业文件中没有局部p点或不在示教模式,解决方法是在示教模式下打开包含局部p点的作业文件。
Q: 法奥FR5机器人的指示灯状态有哪些?
A: 运行模式:蓝色长亮;示教模式:绿色长亮;拖拽模式:白青色长亮;按钮盒记录点:紫色闪烁两下;开始运行程序或类似运动至此:蓝色闪烁两下;停止运行或运动到该点后:红色闪烁两下;报错:红色长亮;下电:黄色闪烁两下。