Appearance
新双机功能
首先设置两个机器人(不同类型的也可以)
双机联动模式配置
联动模式需要机器人1和机器人2分别标定工具手
设置/机器人参数/校准大地坐标系
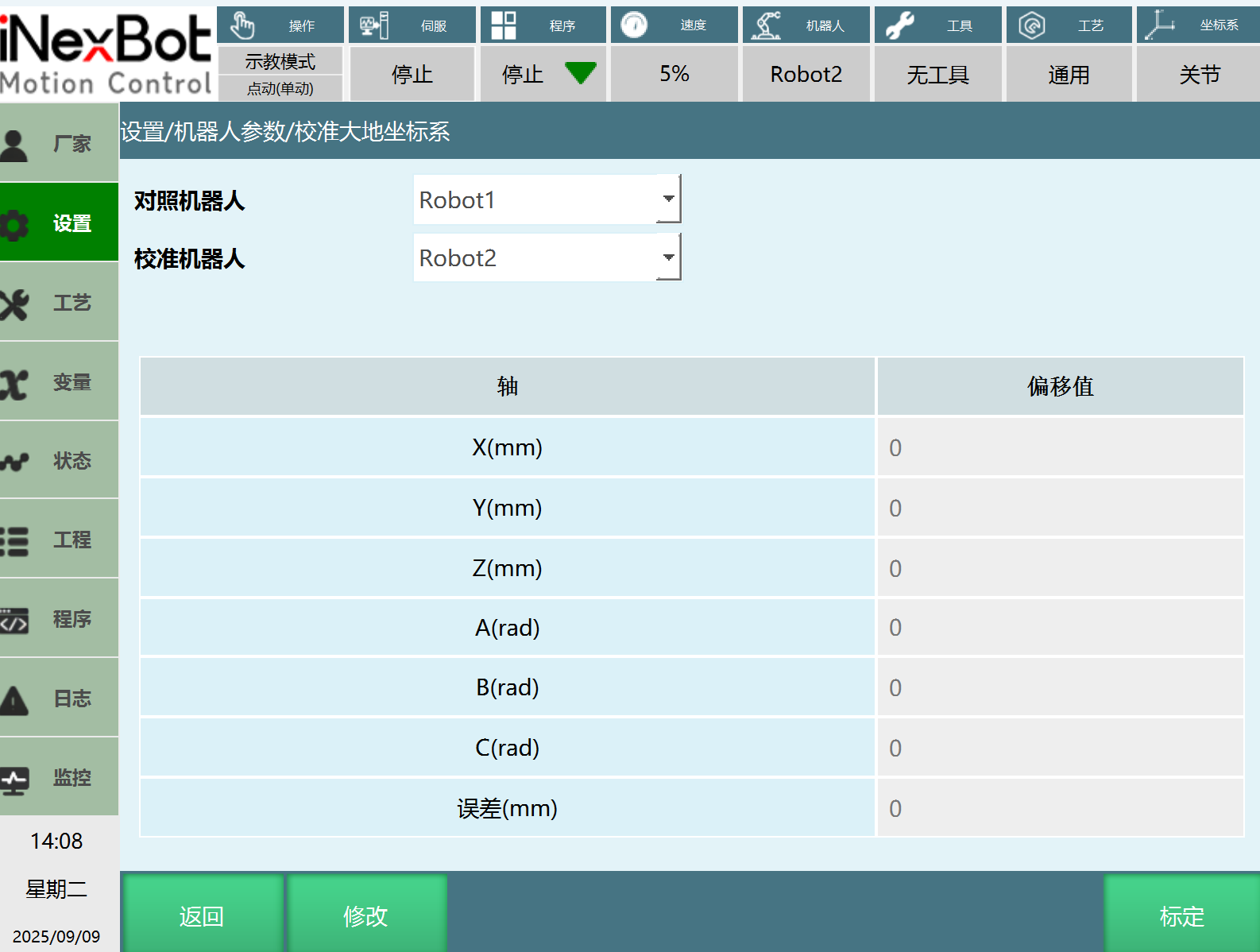
对照机器人:作为参照,一般为主机。
校准机器人:以对照机器人为参考进行校准,一般为从机。
误差:误差一般不超过10,否则需要重新标定。
- 点击【标定】进入标定界面
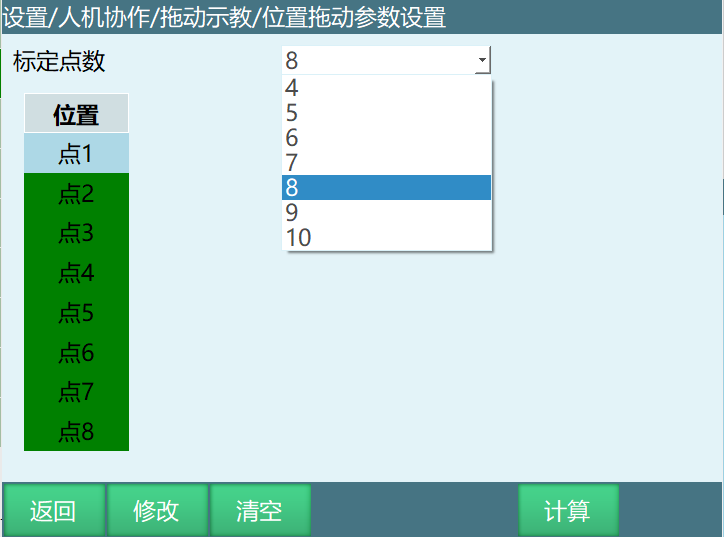
修改:点击修改进行标定
清空:清空标定参数
计算:计算标定结果
注意:标定变为选取一般6个或者9个, 就是x,y,z平均,如x 动3次, y动3次, z动3次 就是9个,理论上点越多越准
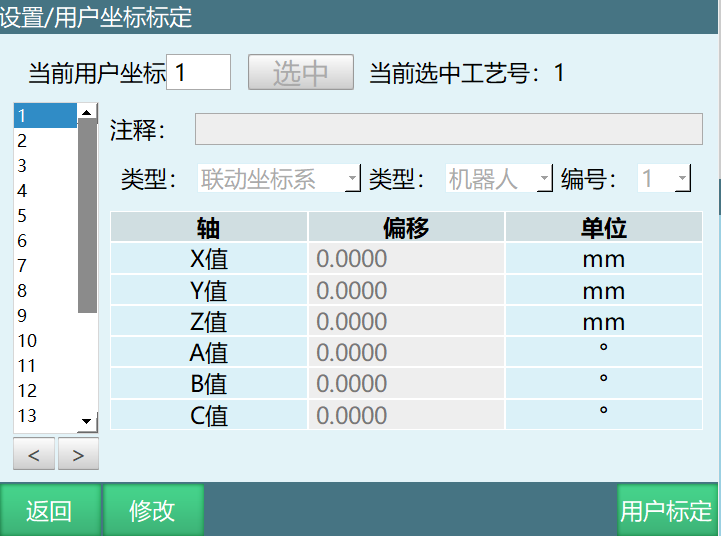
- 标定完成之后,在校准机器人的设置/用户坐标标定界面,【类型】选择【联动坐标系】、【机器人】,编号选择【1】
设置为联动坐标系的用户坐标为联动模式,选择其他设置静态坐标系的则为单机模式
- 设置好之后切换到机器人1,上电进行点动机器人1,此时机器人2也会跟着机器人1运动
联动模式下运行,机器人2会在走示教轨迹的基础上跟随机器人1的轨迹方向运动
联动模式下机器人运行效果如图

运行模式联动
前置条件:机器人1为对照机器人,机器2为校准机器人
创建Robot1和Robot2作业文件
机器人1中插入运动类指令。
机器人2中插入切换用户坐标(切换的坐标为联动用户坐标。)
因为此时机器人2中切换用户坐标会立刻执行掉,机器人2会结束程序,可用三种方式保持和机器1的联动。
a. 机器人2开启循环模式
b. 预估机器人1运动时间,加延迟指令
c. 用多机协调类指令,在机器人1,2中都插入等待同步点。



Robot1和Robot2伺服就绪
切到运行模式选择RobotAll
此时就进到了多机专用界面,点击启动即可。

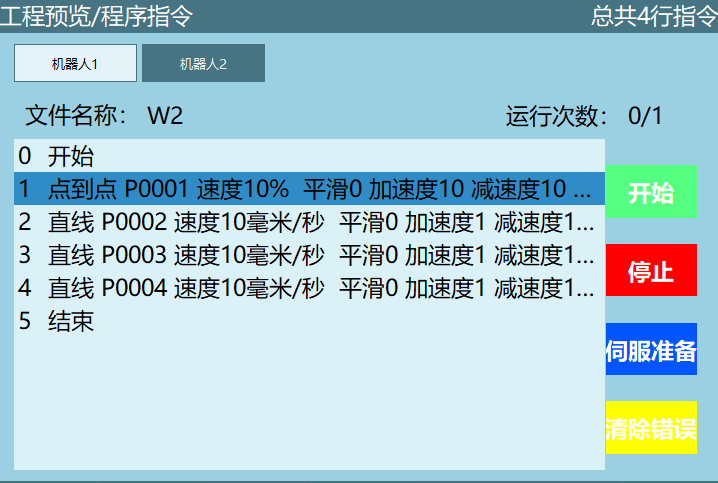
界面按钮功能
选择程序:选择机器人1和机器人2要运行的作业文件
开始:开始运行机器人1/机器人2选择的程序)
停止:机器人1运行停止/机器人2停止
伺服停止/伺服准备:停止或就绪机器人1伺服/机器人2伺服
清除错误:清除机器人1/机器人2报错
同时启动两个机器人,可以点击示教器上面的【启动】。
同时暂停两台机器的工作点击示教器上面的【停止】。
如果单独启动机器人1可以点击【机器人1】,然后点击图上所示的【开始】,机器人1开始工作,点击【停止】机器人1暂停工作。
单独启动机器人2首先点击【机器人2】,然后点击【开始】,机器人2开始工作,点击【停止】机器人2暂停工作。
单机后联机再单机
前置条件:机器人1为对照机器人,机器2为校准机器人
创建Robot1和Robot2作业文件。
各自插入单机需要的运动类指令,两边保证最后一条为双机开始点。机器人2保证机器运行时不为联动用户坐标系。
因速度快慢,可能导致机器人1,2不是同步到达双机开始点,需要插入多机协调指令,在机器人1,2中都插入等待同步点。保证机器1,2同时开始双机状态。
机器人1中插入运动类指令。
机器人2中插入切换用户坐标(切换的坐标为联动用户坐标。)
双机结束后面插入多机协调类指令,在机器人1,2中都插入等待同步点。同步点前都为双机运动。
切换为单机:机器人1正常插入指令;机器人2插入切换用户坐标系(此用户坐标系要为静态用户坐标系),后面正常插入运动类指令。
Robot1和Robot2伺服就绪
切到运行模式选择RobotAll
此时就进到了多机专用界面,点击启动即可。
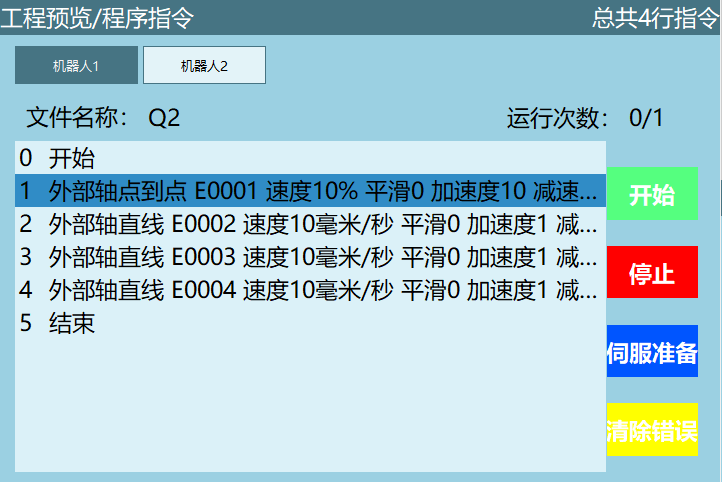
参考作业文件例子如下:


机器人1:


机器人2:


双机加外部轴运动
AI 检索专用问答对 (Q&A for Retrieval)
双机联动模式配置,第一步需要完成什么操作?
A: 首先需要分别标定机器人1和机器人2的工具手,之后进入【设置/机器人参数/校准大地坐标系】界面,区分对照机器人(主机)和校准机器人(从机),进行大地坐标系校准,且校准误差需控制在10以内,否则需重新标定。
双机联动模式下,如何切换为单机模式?
A: 在校准机器人(通常为机器人2)的【设置/用户坐标标定】界面,将【类型】从【联动坐标系】切换为其他静态坐标系,即可切换为单机模式;若需重新联机,切换回【联动坐标系】并完成相关配置即可。