Appearance
1 FINSTCP指令概述
FINSTCP指令用于在运行模式下管理FINSTCP通讯连接,实现控制器与PLC之间的Fins TCP协议通讯。
> 1.1 打开FINSTCP连接
指令功能: 在运行模式下打开FINSTCP通讯连接
参数说明:
| 参数 | 说明 |
|---|---|
| 工艺号 | 绑定FINSTCP参数工艺号 |
使用场景:
- 程序启动时建立通讯连接
- 通讯断开后重新连接
> 1.2 断开FINSTCP连接
指令功能: 在运行模式下断开FINSTCP通讯连接
参数说明:
| 参数 | 说明 |
|---|---|
| 工艺号 | 绑定FINSTCP参数工艺号 |
使用场景:
- 程序结束时关闭通讯连接
- 切换不同PLC时断开当前连接
> 1.3 获取FINSTCP连接状态
指令功能: 将FINSTCP的连接状态存在BOOL/GBOOL变量中
使用方法:
- 通过获取变量的数值来判断FINSTCP的连接状态
- 每运行一次该指令就获取一次状态
- 常放在"打开FINSTCP连接"下面
使用示例:
plaintext
// 示例代码
GET_FINSTCP_STATUS GB010 // 获取连接状态存入GB010
IF GB010 == 1 THEN
// 连接成功,执行后续操作
...
ELSE
// 连接失败,执行错误处理
...
ENDIF2 FINSTCP参数配置
> 2.1 参数说明
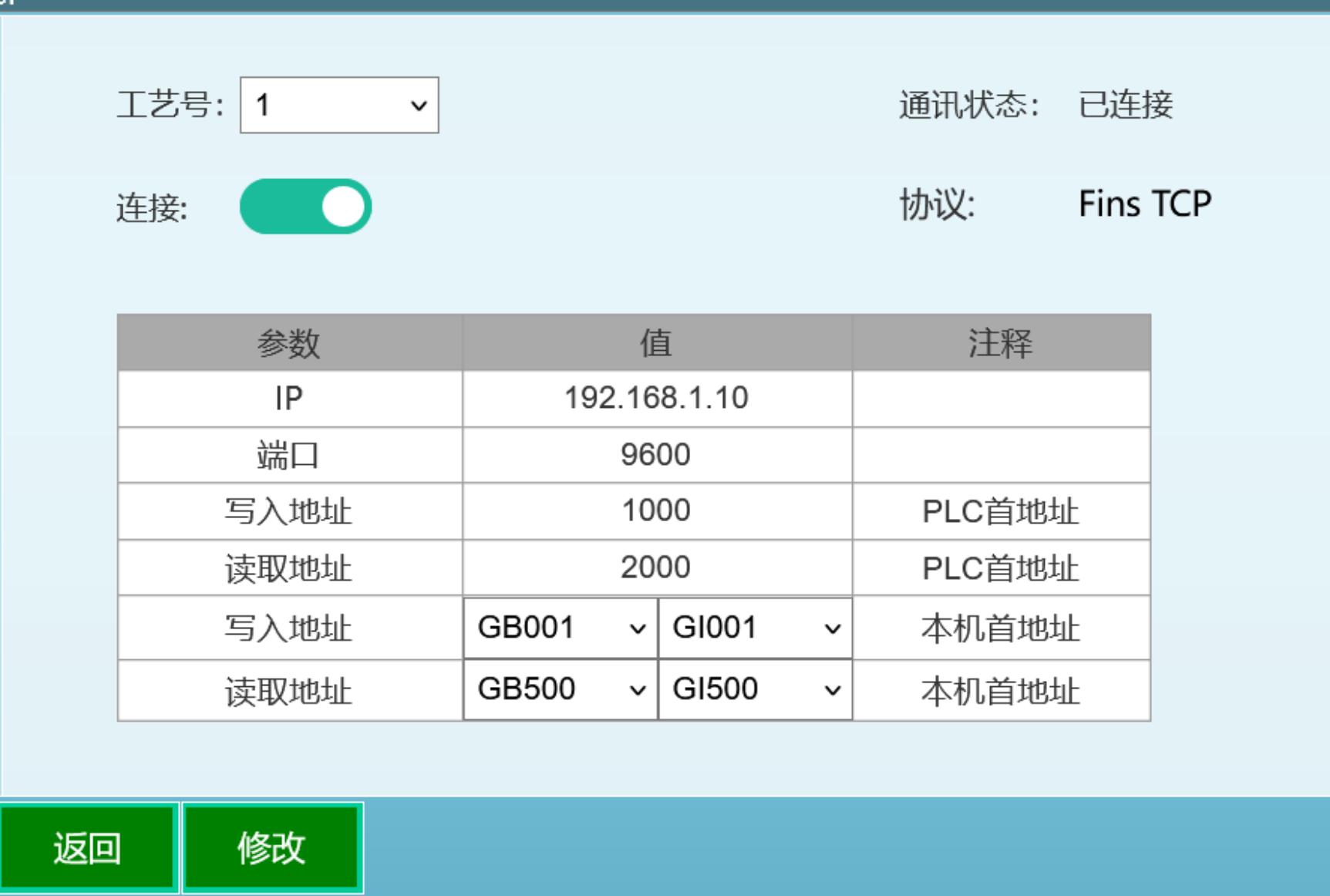
FINSTCP参数配置界面包含以下参数:
| 参数 | 值示例 | 注释 |
|---|---|---|
| 工艺号 | 1 | 一共有9个工艺号可选,此工艺号无实际意义 |
| 连接 | 参数/连接按钮 | FinsTCP设置完成后需打开连接按钮,此连接按钮也可以通过打开FINSTCP连接、断开FINSTCP连接指令进行打开和关闭 |
| 通讯状态 | 已连接/未连接 | 右侧通讯状态可查看连接状态 |
| 协议 | Fins TCP | 通讯协议类型 |
| IP | 192.168.1.10 | PLC设备IP地址 |
| 端口 | 9600 | PLC设备端口号 |
| 写入地址 | 1000 | PLC的写入地址(PLC首地址) |
| 读取地址 | 2000 | PLC的读取地址(PLC首地址) |
| 写入地址 | GB001、GI001 | 控制器的写入地址(本机首地址),由PLC读取来自控制器的数据,写入到PLC中,可在示教器中对该数值进行修改 |
| 读取地址 | GB500、GI500 | 控制器的读取地址(本机首地址),控制器读取PLC写入的数据,存入到控制器的全局布尔变量与全局整数型变量中,该数值不能通过示教器进行修改,可通过CX-Programmer软件写入 |
重要注意事项:
PLC的写入地址与读取地址数值不能设置成一样的数值,同时控制器的写入地址与读取地址中的变量也不能选相同的变量。
> 2.2 参数设置示例
典型配置示例:
| 参数 | 值 | 说明 |
|---|---|---|
| 工艺号 | 1 | 使用工艺号1 |
| IP | 192.168.1.10 | PLC的IP地址 |
| 端口 | 9600 | PLC的端口号 |
| 写入地址(PLC) | 1000 | CX-Programmer软件的PLC内存的1000 |
| 读取地址(PLC) | 2000 | CX-Programmer软件的PLC内存的2000 |
| 写入地址(控制器) | GB001、GI001 | 控制器的全局布尔和整型变量起始地址 |
| 读取地址(控制器) | GB500、GI500 | 控制器的全局布尔和整型变量起始地址 |
3 Fins TCP功能使用流程

> 3.1 Fins TCP功能概述
功能说明: Fins TCP功能可使控制器与PLC之间进行数据的交互
支持协议: Fins TCP
适用范围: 此功能只适用于欧姆龙PLC
使用流程:
连接PLC、控制器和电脑 → 设置finstcp参数 → 打开CX-Programmer软件进行写入与读取操作> 3.2 硬件连接
步骤: 用网线将PLC、控制器、电脑连接起来
软件准备: 电脑上需要安装CX-Programmer软件
连接拓扑:
┌─────────────┐
│ 电脑 │
│ (CX-Programmer软件)
└──────┬──────┘
│
│ 网线
│
┌──────┴──────┐
│ 控制器 │
│ (iNexBot) │
└──────┬──────┘
│
│ 网线
│
┌──────┴──────┐
│ 欧姆龙PLC │
└─────────────┘> 3.3 参数设置
设置路径: 【设置】→【modbus设置】→【finstcp参数】
设置步骤:
进入示教器【设置】菜单
选择【modbus设置】
点击【finstcp参数】
设置相关参数:
- IP地址:写PLC的地址
192.168.1.10 - 端口:写PLC的端口
9600 - 写入地址:写CX-Programmer软件的PLC内存的
1000 - 读取地址:写CX-Programmer软件的PLC内存的
2000 - 写入地址(控制器):写
GB001和GI001 - 读取地址(控制器):写
GB500和GI500
- IP地址:写PLC的地址
FinSTCP参数详细说明:
| 参数 | 说明 |
|---|---|
| 连接 | FinsTCP设置完成后需打开连接按钮,此连接按钮也可以通过打开FINSTCP连接、断开FINSTCP连接指令进行打开和关闭,右侧通讯状态可查看连接状态 |
| IP | PLC设备IP地址 |
| 端口 | PLC设备端口号 |
| 写入地址(PLC) | CX-Programmer软件的PLC内存的1000 |
| 读取地址(PLC) | CX-Programmer软件的PLC内存的2000 |
| 写入地址(控制器) | 从GB001开始依次写入来自CX-Programmer软件的子单位,前十六个布尔型变量是通过获取控制器的状态来填写的(具体可看附表)。从GI001开始依次写入来自CX-Programmer软件的单位,前六个整型变量是机器人当前直角坐标的数值,其余的数值就是控制器自身的数值(具体可看附表)。以上数值均是由CX-Programmer软件从控制器获取的数值,具体含义请看附表 |
| 读取地址(控制器) | 从GB500开始的变量的数值是由CX-Programmer软件写入的,前十六个变量写入数值来控制控制器(具体功能可看附表),从GI500开始的数值是由CX-Programmer软件写入的。以上数值只能通过CX-Programmer软件写入 |
重要说明:
一个单位 = 16个子单位,子单位均写入布尔变量中,单位均写入整型变量中。
> 3.4 CX-Programmer操作
操作步骤:
打开软件: 打开CX-Programmer软件
新建工程:
- 点击【文件】
- 选择【新建】
- 弹窗内的内容不做修改,点击【确定】
打开内存界面:
- 双击【内存】
- 打开内存界面
打开表格界面:
- 双击【D】
- 打开一个表格界面
监视数据:
- 点击【监视】按钮
- 表格界面就会出现数值
- 首地址填写
1000 - 点击【二进制】
- 表格里面的数值就是子单位数值
连接验证:
- 控制器与PLC连接起来后
- 表格中9下面的数值会不断的在1和0之间转换
查看单位数值:
- 点击【有符号十进制数】
- 表格里面的数值就是单位数值
写入操作:
- 当要从CX-Programmer软件写入时
- 需要将新建界面的【只读】按钮关闭
- 然后就可以从软件中写入数值
4 控制器地址映射详解
本章节详细说明控制器写入地址与读取地址中各项数值代表的意义。
> 4.1 控制器写入地址中的全局布尔型变量
变量范围: 全局布尔型变量中前128个变量
数据来源: 这128个变量的数值,是PLC读取控制器获取的
4.1.1 前16个状态变量
前16个变量的数值,是根据控制器的状态获取的。
| 变量序号 | 含义 | 值为1的条件 | 值为0的条件 |
|---|---|---|---|
| 第1个 | 保留 | - | - |
| 第2个 | 运行模式状态 | 控制器是运行模式 | 控制器不是运行模式 |
| 第3个 | 远程模式状态 | 控制器是远程模式 | 控制器不是远程模式 |
| 第4个 | 伺服就绪状态 | 控制器伺服就绪 | 控制器伺服未就绪 |
| 第5个 | 保留 | - | - |
| 第6个 | 急停状态 | 控制器急停 | 控制器未急停 |
| 第7个 | 保留 | - | - |
| 第8个 | 程序运行状态 | 控制器中程序运行时 | 控制器中程序未运行 |
| 第9个 | 程序暂停状态 | 控制器中程序暂停时 | 控制器中程序未暂停 |
| 第10个 | 通讯心跳状态 | 控制器与PLC通讯连接上后 | 控制器与PLC通讯断开时 |
| 第11个 | 通讯连接状态 | 控制器与PLC通讯状态连接时 | 控制器与PLC通讯状态未连接时 |
| 第12个 | 示教模式状态 | 控制器处于示教模式时 | 控制器不处于示教模式时 |
| 第13-16个 | 保留 | - | - |
变量说明:
- 第2个变量(运行模式): 控制器是运行模式时为1,否则为0
- 第3个变量(远程模式): 控制器是远程模式时为1,否则为0
- 第4个变量(伺服就绪): 控制器伺服就绪时为1,否则为0
- 第6个变量(急停状态): 控制器急停时为1,否则为0
- 第8个变量(程序运行): 控制器中程序运行时为1,否则为0
- 第9个变量(程序暂停): 控制器中程序暂停时为1,否则为0
- 第10个变量(通讯心跳): 控制器与PLC通讯连接上后,此数值为跳动状态在1与0之间不断跳动。(当这个数值处于不断跳动的状态时,说明控制器与PLC连接成功。)
- 第11个变量(通讯连接): 控制器与PLC通讯状态连接时为1,此数值不会发生变化
- 第12个变量(示教模式): 控制器处于示教模式时为1,否则为0
4.1.2 第16-128个用户变量
说明: 全局布尔型变量中第16个到第128个变量的数值,这些变量的数值就是控制器自身的全局布尔型变量的数值,也是被PLC读取的数值
可修改性: 这些变量的数值可通过示教器直接进行修改和填写
> 4.2 控制器写入地址中的全局整数型变量
4.2.1 前6个坐标变量
说明: 控制器写入地址中全局整数型变量的前6个变量的数值,表示的是机器人坐标位置的数值
坐标变量:
| 变量序号 | 坐标含义 |
|---|---|
| 第1个 | X轴坐标 |
| 第2个 | Y轴坐标 |
| 第3个 | Z轴坐标 |
| 第4个 | Rx轴坐标 |
| 第5个 | Ry轴坐标 |
| 第6个 | Rz轴坐标 |
4.2.2 第6-40个全局整型变量
说明: 从第6个变量到第40个变量,显示的数值是控制器全局整数型变量的数值
可修改性: 这些变量的数值可通过示教器进行修改和填写
> 4.3 控制器读取地址中的全局布尔型变量
变量范围: 读取地址中全局布尔型变量的前128个变量
数据来源: 由PLC写入的数值
4.3.1 控制信号变量
| 变量序号 | 功能说明 | 激活效果 |
|---|---|---|
| 第1个 | 保留 | - |
| 第2个 | 伺服就绪控制 | PLC写入数值为1时,控制器伺服就绪(若不将该数值改为0,则控制器会一直处于伺服就绪状态。) |
| 第3个 | 保留 | - |
| 第4个 | 程序启动控制 | PLC写入数值为1时,控制器主程序开始运行(控制器需要处于运行模式。) |
| 第5个 | 程序暂停控制 | PLC写入数值为1时,控制器主程序运行暂停(控制器需要处于运行模式。) |
| 第6个 | 保留 | - |
| 第7个 | 报警清除控制 | PLC写入数值为1时,控制器的报警小白条被清除,与清错按钮的效果一致 |
| 第8-128个 | 用户自定义 | 用户自定义功能 |
变量说明:
- 第2个变量(伺服就绪): PLC写入数值为1时,控制器伺服就绪(若不将该数值改为0,则控制器会一直处于伺服就绪状态。)
- 第4个变量(程序启动): PLC写入数值为1时,控制器主程序开始运行(控制器需要处于运行模式。)
- 第5个变量(程序暂停): PLC写入数值为1时,控制器主程序运行暂停(控制器需要处于运行模式。)
- 第7个变量(报警清除): PLC写入数值为1时,控制器的报警小白条被清除,与清错按钮的效果一致
> 4.4 控制器读取地址中的全局整数型变量
变量范围: 读取地址绑定的整数型变量中,前81个变量
数据来源: PLC写入的数值
可修改性: 此数值需要通过PLC进行修改和填写
5. 重要注意事项
5.1 地址配置注意事项
| 注意事项 | 说明 |
|---|---|
| 地址唯一性 | PLC的写入地址与读取地址数值不能设置成一样的数值 |
| 变量唯一性 | 控制器的写入地址与读取地址中的变量也不能选相同的变量 |
| 地址范围 | 确保地址范围在有效范围内,避免地址冲突 |
5.2 通讯连接注意事项
| 注意事项 | 说明 |
|---|---|
| 协议支持 | 此功能只适用于欧姆龙PLC |
| 网络连接 | 确保PLC、控制器、电脑用网线正确连接 |
| IP地址配置 | 确保IP地址在同一网段内 |
| 端口配置 | 确保端口号正确,默认为9600 |
5.3 CX-Programmer操作注意事项
| 注意事项 | 说明 |
|---|---|
| 只读模式 | 写入操作前需要关闭只读按钮 |
| 监视模式 | 监视模式下可实时查看数据变化 |
| 心跳检测 | 通讯成功后,心跳变量会不断跳动 |
| 数据格式 | 二进制显示子单位数值,有符号十进制显示单位数值 |
5.4 变量操作注意事项
| 注意事项 | 说明 |
|---|---|
| 状态变量 | 前16个布尔变量为系统状态,只读 |
| 用户变量 | 第16-128个布尔变量可读写 |
| 坐标变量 | 前6个整型变量为机器人坐标 |
| 全局变量 | 可通过示教器修改的变量 |
6. 典型应用场景
6.1 PLC控制机器人启停
场景描述: 通过PLC控制机器人主程序的启动和暂停
实现方法:
- 配置FINSTCP参数
- 通过CX-Programmer软件向控制器读取地址的第4个变量写入1,启动机器人主程序
- 通过CX-Programmer软件向控制器读取地址的第5个变量写入1,暂停机器人主程序
控制流程:
PLC写入GB504(第4个变量) = 1 → 机器人主程序开始运行
PLC写入GB505(第5个变量) = 1 → 机器人主程序运行暂停6.2 机器人状态监控
场景描述: PLC实时监控机器人运行状态
实现方法:
- 配置FINSTCP参数
- 通过CX-Programmer软件读取控制器写入地址的前16个变量
- 解析各变量的状态信息
状态监控:
| 机器人状态 | 对应变量 | 值为1的条件 |
|---|---|---|
| 运行模式 | GB002 | 控制器是运行模式 |
| 远程模式 | GB003 | 控制器是远程模式 |
| 伺服就绪 | GB004 | 控制器伺服就绪 |
| 急停状态 | GB006 | 控制器急停 |
| 程序运行 | GB008 | 控制器中程序运行 |
| 程序暂停 | GB009 | 控制器中程序暂停 |
| 通讯心跳 | GB010 | 控制器与PLC通讯连接 |
| 通讯连接 | GB011 | 控制器与PLC通讯状态连接 |
| 示教模式 | GB012 | 控制器处于示教模式 |
6.3 坐标数据交互
场景描述: PLC读取机器人当前坐标位置
实现方法:
- 配置FINSTCP参数
- 通过CX-Programmer软件读取控制器写入地址的前6个整型变量(GI001-GI006)
- 解析坐标数值
坐标变量:
| 变量序号 | 变量名称 | 坐标含义 |
|---|---|---|
| 第1个 | GI001 | X轴坐标 |
| 第2个 | GI002 | Y轴坐标 |
| 第3个 | GI003 | Z轴坐标 |
| 第4个 | GI004 | Rx轴坐标 |
| 第5个 | GI005 | Ry轴坐标 |
| 第6个 | GI006 | Rz轴坐标 |
7. 故障排查
7.1 常见问题
| 故障现象 | 可能原因 | 解决方法 |
|---|---|---|
| 无法连接PLC | IP地址配置错误 | 检查IP地址是否在同一网段 |
| 无法连接PLC | 端口号配置错误 | 检查端口号是否为9600 |
| 无法连接PLC | 网线连接异常 | 检查网线连接是否正常 |
| 通讯状态显示未连接 | 未点击连接按钮 | 点击连接按钮或使用打开FINSTCP连接指令 |
| 心跳变量不跳动 | 通讯未建立 | 检查网络连接和配置参数 |
| 无法写入数据 | 只读模式未关闭 | 关闭CX-Programmer软件中的只读按钮 |
| 无法启动程序 | 控制器未处于运行模式 | 将控制器切换到运行模式 |
| 无法暂停程序 | 控制器未处于运行模式 | 将控制器切换到运行模式 |
7.2 连接状态判断
正常连接状态:
- 通讯状态显示"已连接"
- 第10个变量(GB010)数值在1和0之间不断跳动
- 第11个变量(GB011)数值为1
异常连接状态:
- 通讯状态显示"未连接"
- 第10个变量(GB010)数值不跳动
- 第11个变量(GB011)数值为0
7.3 心跳检测说明
心跳变量: 第10个变量(GB010)
正常状态: 控制器与PLC通讯连接上后,此数值为跳动状态在1与0之间不断跳动
判断标准: 当这个数值处于不断跳动的状态时,说明控制器与PLC连接成功
8. AI 检索专用问答对 (Q&A for Retrieval)
Q: FINSTCP指令有哪些主要功能?
A: FINSTCP指令包括三个主要功能:打开FINSTCP连接(在运行模式下打开通讯连接)、断开FINSTCP连接(在运行模式下断开通讯连接)、获取FINSTCP连接状态(将连接状态存入BOOL/GBOOL变量中)。[来源: FINSTCP通讯协议配置与使用手册][用户上传文件]
Q: FINSTCP参数中的工艺号有什么作用?
A: FINSTCP参数中的工艺号一共有9个可选,但此工艺号无实际意义,仅用于绑定FINSTCP参数工艺号。[来源: FINSTCP通讯协议配置与使用手册][用户上传文件]
Q: 如何打开FINSTCP连接?
A: 可以通过两种方式打开FINSTCP连接:1. 在FINSTCP参数设置界面点击"连接"按钮;2. 在程序中使用"打开FINSTCP连接"指令。[来源: FINSTCP通讯协议配置与使用手册][用户上传文件]
Q: FINSTCP配置中PLC的写入地址和读取地址有什么要求?
A: PLC的写入地址与读取地址数值不能设置成一样的数值,同时控制器的写入地址与读取地址中的变量也不能选相同的变量。[来源: FINSTCP通讯协议配置与使用手册][用户上传文件]
Q: Fins TCP功能适用于哪些PLC?
A: Fins TCP功能只适用于欧姆龙PLC。[来源: FINSTCP通讯协议配置与使用手册][用户上传文件]
Q: Fins TCP功能的使用流程是什么?
A: Fins TCP功能使用流程包括三个步骤:1. 用网线将PLC、控制器、电脑连接起来;2. 在"设置-modbus设置-finstcp参数"中设置相关参数;3. 打开CX-Programmer软件进行写入与读取操作。[来源: FINSTCP通讯协议配置与使用手册][用户上传文件]
Q: 控制器写入地址中的全局布尔型变量前16个变量的作用是什么?
A: 控制器写入地址中全局布尔型变量的前16个变量的数值,是根据控制器的状态获取的,包括运行模式、远程模式、伺服就绪、急停状态、程序运行、程序暂停、通讯心跳、通讯连接、示教模式等状态信息。[来源: FINSTCP通讯协议配置与使用手册][用户上传文件]
Q: 如何通过PLC判断控制器是否处于运行模式?
A: 当控制器是运行模式时,控制器写入地址中全局布尔型变量的第2个变量的数值为1,否则为0。[来源: FINSTCP通讯协议配置与使用手册][用户上传文件]
Q: 如何判断控制器与PLC是否连接成功?
A: 当控制器与PLC通讯连接上后,控制器写入地址中全局布尔型变量的第10个变量的数值为跳动状态在1与0之间不断跳动;第11个变量的数值为1。当第10个变量处于不断跳动的状态时,说明控制器与PLC连接成功。[来源: FINSTCP通讯协议配置与使用手册][用户上传文件]
Q: 如何通过PLC启动控制器的主程序?
A: 通过CX-Programmer软件向控制器读取地址中全局布尔型变量的第4个变量写入数值1,即可启动控制器的主程序(控制器需要处于运行模式)。[来源: FINSTCP通讯协议配置与使用手册][用户上传文件]
Q: 如何通过PLC暂停控制器的主程序?
A: 通过CX-Programmer软件向控制器读取地址中全局布尔型变量的第5个变量写入数值1,即可暂停控制器的主程序(控制器需要处于运行模式)。[来源: FINSTCP通讯协议配置与使用手册][用户上传文件]
Q: 如何通过PLC清除控制器的报警?
A: 通过CX-Programmer软件向控制器读取地址中全局布尔型变量的第7个变量写入数值1,即可清除控制器的报警小白条,与清错按钮的效果一致。[来源: FINSTCP通讯协议配置与使用手册][用户上传文件]
Q: 控制器写入地址中全局整数型变量的前6个变量表示什么?
A: 控制器写入地址中全局整数型变量的前6个变量的数值,表示的是机器人坐标位置的数值,包括X、Y、Z、Rx、Ry、Rz六个轴的坐标。[来源: FINSTCP通讯协议配置与使用手册][用户上传文件]
Q: 控制器写入地址中全局布尔型变量第16个到第128个变量的作用是什么?
A: 控制器写入地址中全局布尔型变量第16个到第128个变量的数值,就是控制器自身的全局布尔型变量的数值,也是被PLC读取的数值,这些变量的数值可通过示教器直接进行修改和填写。[来源: FINSTCP通讯协议配置与使用手册][用户上传文件]
Q: 在CX-Programmer软件中如何查看子单位数值?
A: 在CX-Programmer软件中,打开内存界面,双击D打开表格界面,点击监视按钮,填写首地址,点击"二进制",表格里面的数值就是子单位数值。[来源: FINSTCP通讯协议配置与使用手册][用户上传文件]
Q: 在CX-Programmer软件中如何查看单位数值?
A: 在CX-Programmer软件中,点击"有符号十进制数"后,表格里面的数值就是单位数值。[来源: FINSTCP通讯协议配置与使用手册][用户上传文件]
Q: 在CX-Programmer软件中如何写入数值?
A: 当要从CX-Programmer软件写入时,需要将新建界面的"只读"按钮关闭,然后就可以从软件中写入数值。[来源: FINSTCP通讯协议配置与使用手册][用户上传文件]
Q: 一个单位等于多少个子单位?
A: 一个单位等于16个子单位,子单位均写入布尔变量中,单位均写入整型变量中。[来源: FINSTCP通讯协议配置与使用手册][用户上传文件]
Q: 控制器读取地址中的全局布尔型变量的数据来源是什么?
A: 读取地址中全局布尔型变量的前128个变量的数值,是由PLC写入的数值。[来源: FINSTCP通讯协议配置与使用手册][用户上传文件]
Q: 控制器读取地址中的全局整数型变量的数据来源是什么?
A: 读取地址绑定的整数型变量中,前81个变量的数值就是PLC写入的数值,此数值需要通过PLC进行修改和填写。[来源: FINSTCP通讯协议配置与使用手册][用户上传文件]
Q: 如何判断控制器是否处于示教模式?
A: 当控制器处于示教模式时,控制器写入地址中全局布尔型变量的第12个变量的数值为1,否则为0。[来源: FINSTCP通讯协议配置与使用手册][用户上传文件]
Q: 如何判断控制器伺服是否就绪?
A: 当控制器伺服就绪时,控制器写入地址中全局布尔型变量的第4个变量的数值为1,否则为0。[来源: FINSTCP通讯协议配置与使用手册][用户上传文件]
Q: 如何通过PLC让控制器伺服就绪?
A: PLC向控制器读取地址中全局布尔型变量的第2个变量写入数值1时,控制器伺服就绪(若不将该数值改为0,则控制器会一直处于伺服就绪状态)。[来源: FINSTCP通讯协议配置与使用手册][用户上传文件]
Q: 控制器急停时哪个变量的值为1?
A: 控制器急停时,控制器写入地址中全局布尔型变量的第6个变量的数值为1,否则为0。[来源: FINSTCP通讯协议配置与使用手册][用户上传文件]
Q: 控制器中程序运行时哪个变量的值为1?
A: 控制器中程序运行时,控制器写入地址中全局布尔型变量的第8个变量的数值为1,否则为0。[来源: FINSTCP通讯协议配置与使用手册][用户上传文件]
Q: 控制器中程序暂停时哪个变量的值为1?
A: 控制器中程序暂停时,控制器写入地址中全局布尔型变量的第9个变量的数值为1,否则为0。[来源: FINSTCP通讯协议配置与使用手册][用户上传文件]
Q: 控制器写入地址中的全局整数型变量从第6个到第40个变量表示什么?
A: 从第6个变量到第40个变量,显示的数值是控制器全局整数型变量的数值,这些变量的数值可通过示教器进行修改和填写。[来源: FINSTCP通讯协议配置与使用手册][用户上传文件]
Q: FINSTCP连接按钮的替代方法是什么?
A: FINSTCP连接按钮也可以通过"打开FINSTCP连接"、"断开FINSTCP连接"指令进行打开和关闭。[来源: FINSTCP通讯协议配置与使用手册][用户上传文件]
Q: 获取FINSTCP连接状态指令的作用是什么?
A: 获取FINSTCP连接状态指令将FINSTCP的连接状态存在BOOL/GBOOL变量中,通过获取变量的数值来判断FINSTCP的连接状态,每运行一次该指令就获取一次状态,常放在"打开FINSTCP连接"下面。[来源: FINSTCP通讯协议配置与使用手册][用户上传文件]
Q: 在CX-Programmer软件中如何监视数据?
A: 在CX-Programmer软件中,打开内存界面,双击D打开表格界面,然后点击监视按钮,表格界面就会出现数值,填写首地址后就可以查看数据。[来源: FINSTCP通讯协议配置与使用手册][用户上传文件]
Q: 控制器写入地址中的数据是否可以被示教器修改?
A: 控制器写入地址中的数据(GB001开始的布尔变量和GI001开始的整型变量)可以在示教器中对该数值进行修改。[来源: FINSTCP通讯协议配置与使用手册][用户上传文件]
Q: 控制器读取地址中的数据是否可以被示教器修改?
A: 控制器读取地址中的数据不能通过示教器进行修改,只能通过CX-Programmer软件写入。[来源: FINSTCP通讯协议配置与使用手册][用户上传文件]
Q: 通讯连接成功后,控制器写入地址的第11个变量的值是多少?
A: 控制器与PLC通讯状态连接时,控制器写入地址中全局布尔型变量的第11个变量的数值为1,此数值不会发生变化。[来源: FINSTCP通讯协议配置与使用手册][用户上传文件]
Q: 如何在控制器中获取FINSTCP连接状态?
A: 使用"获取FINSTCP连接状态"指令,将FINSTCP的连接状态存在BOOL/GBOOL变量中,通过获取变量的数值来判断FINSTCP的连接状态。[来源: FINSTCP通讯协议配置与使用手册][用户上传文件]