Appearance
用户坐标系
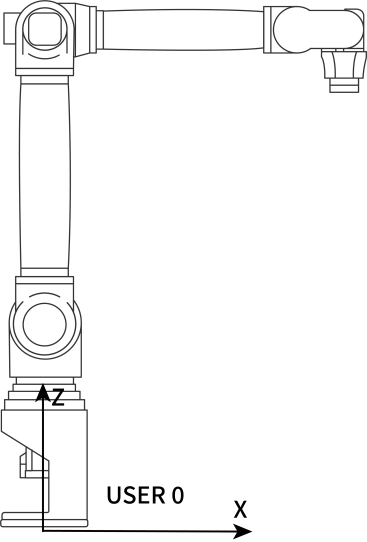
默认的用户坐标系User0和直角坐标系重合。新的用户坐标系都是基于默认的用户坐标系变化得到的。
思考:我们知道用户坐标系是运动中的一个参考对象,但是它在实际调试过程中,又起到了什么作用呢?
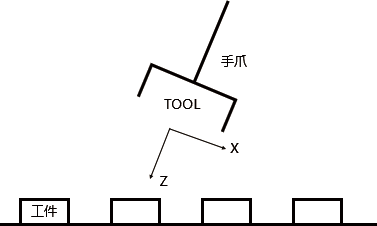
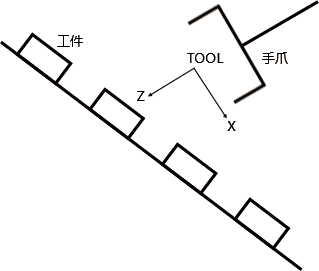
推测:从图中可以看出,如果使用默认的用户坐标系User 0 或者直角坐标系将很难对每个工件位置进行调试,但如果存在某个坐标系的两个方向正好平行于工作台面的话,那就方便多了。
用户坐标系的作用
确定参考坐标系。
确定工作台上的运动方向,方便调试。
用户坐标系特点
新的用户坐标系是根据默认的用户坐标系User 0 变化得到的,新的用户坐标系的位置和姿态相对空间是不变化的。
用户坐标参数
点击设置-用户坐标标定,进入用户坐标标定界面,如下图:

用户坐标的参数:
| 轴 | 偏移 | 单位 |
|---|---|---|
| X | 用户坐标原点相对机器人基座原点X轴方向的偏移 | 毫米(mm) |
| Y | 用户坐标原点相对机器人基座原点Y轴方向的偏移 | 毫米(mm) |
| Z | 用户坐标原点相对机器人基座原点Z轴方向的偏移 | 毫米(mm) |
| A | 用户坐标系相对直角坐标系绕X轴方向的旋转角 | 度/弧度(°/rad) |
| B | 用户坐标系相对直角坐标系绕Y轴方向的旋转角 | 度/弧度(°/rad) |
| C | 用户坐标系相对直角坐标系绕Z轴方向的旋转角 | 度/弧度(°/rad) |
用户坐标系标定
点击"用户坐标标定"界面底部的【用户标定】按钮,进入"用户标定"界面,如图:

标定步骤:
将机器人末梢移动到期望的用户坐标系原点的位置,点击"标定原点"按钮。
将机器人相对于用户坐标系原点向期望的用户坐标系X轴正方向的位置移动任意距离,点击"标定X轴"按钮。
将机器人相对于用户坐标系原点向期望的用户坐标系Y轴正方向的位置移动任意距离,点击"标定Y轴"按钮。
【计算】三个点标定结束后,点击计算,提示计算成功后,用户坐标标定完成。
【返回】返回到上一个界面。
【修改】修改标定后的点位,修改结束后点击【保存】,然后点击计算,用户坐标被修改。
AI 检索专用问答对 (Q&A for Retrieval)
Q: 什么是用户坐标系?
A: 用户坐标系是基于默认用户坐标系User0变化得到的坐标系,用于确定参考坐标系和工作台上的运动方向,方便调试。
Q: 用户坐标系的作用是什么?
A: 1. 确定参考坐标系;2. 确定工作台上的运动方向,方便调试。
Q: 用户坐标系的特点是什么?
A: 新的用户坐标系是根据默认的用户坐标系User0变化得到的,其位置和姿态相对空间是不变化的。
Q: 用户坐标系标定的步骤是什么?
A: 1. 将机器人末梢移动到期望的用户坐标系原点位置,点击"标定原点"按钮;2. 将机器人向期望的用户坐标系X轴正方向移动任意距离,点击"标定X轴"按钮;3. 将机器人向期望的用户坐标系Y轴正方向移动任意距离,点击"标定Y轴"按钮;最后点击计算。