Appearance
工业机器人控制器 C2200 系列
产品简介
纳博特 C2200 系列工业机器人控制器是一款高性能运动控制整机,采用成熟设计开发方案,具备丰富的接口与较强的抗干扰能力。
该控制器内部集成纳博特自研的运动控制算法,能够适配多品牌、多型号机器人,定制性强,可满足企业在生产上的各类需求。芯片采用车规级设计,运行稳定,运算功能强大,是工业应用的理想选择。
产品图

产品特点
- 自研运控算法:内置纳博特自主研发的运动控制算法,适配多品牌、多型号机器人
- 车规级芯片:采用全志 T507 芯片(四核主频 1.5GHz),运行稳定可靠
- 丰富接口:36 路 I/O、8 路模拟量、EtherCAT、CANopen、USB、串口等多种接口
- 图形处理:搭载 G31 GPU,支持高级图形处理能力
- 断电保护:3 秒 UPS 断电保护,防止数据丢失
- 多轴同步:支持最多 64 轴同步运动控制
产品优势
丰富接口
C2200 控制器提供多达 36 路数字 I/O 接口、8 路模拟接口(4 AI + 4 AO)、2 个 USB 2.0 接口、1 路 CAN 2.0 接口、1 路 RS485 串口与 1 路 RS232 串口,支持多种通讯协议,可满足不同设备的外部连接需求,可扩展性强。
此外,还支持 EtherCAT、CANopen 等高速总线接口,可实现伺服主从站的连接以及最多 64 轴同步运动控制。
丰富的接口种类和数量使 C2200 能够轻松应对各种复杂的工业自动化应用场景。
全新 IO 布局
C2200 相较于传统市场竞品进行了 IO 布局的优化调整,接线更加直观易懂,大幅降低了操作与接线难度。
强劲性能
- 主控芯片:全志 T507,4 核主频 1.5GHz
- GPU:G31 图形处理芯片
- 内存:2GB
- 存储:8GB eMMC Flash
- 操作系统:RT-Linux 实时操作系统
产品参数
| 项目 | 参数 |
|---|---|
| CPU | 全志 T507,4 核主频 1.5GHz |
| GPU | G31 |
| 内存 | 2GB |
| 板载存储 | eMMC Flash 8GB |
| 操作系统 | RT-Linux |
| 千兆网口 | 1 路(RTL8211) |
| 百兆网口 | 2 路(RTL8152、IP101GR) |
| USB 接口 | 2 路 USB 2.0 |
| 串口 | 1 路 RS232,1 路 RS485 |
| 数字输入(DI) | 18 路,带光隔 |
| 数字输出(DO) | 18 路,带光隔 |
| 模拟输入(AI) | 4 路(0-10V),精度 12bit |
| 模拟输出(AO) | 4 路(0-10V),精度 12bit |
| CAN | 1 路 CAN 2.0 |
| EtherCAT | 支持(高速总线) |
| CANopen | 支持(高速总线) |
| 电源 | DC 24V |
| 功率 | 4W(不含外部电路) |
| 断电保护 | 3s UPS 断电保护 |
| 工作温度 | -10 ~ 60℃ |
| 存储温度 | -40 ~ 85℃ |
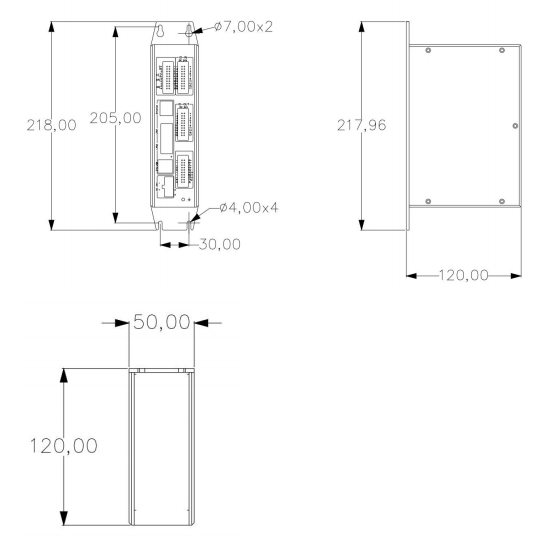
产品尺寸
产品尺寸规格请参见下图:
Q&A
Q:C2200 控制器支持哪些运动控制指令?
A:C2200 支持 MOVJ(点到点)、MOVL(直线)、MOVC(圆弧)、MOVCA(整圆)、MOVS(曲线插补)、IMOV(增量)、SAMOV(定点移动)、MOVARCH(门型运动)等多种运动控制指令,并支持运动指令与 IO、Modbus 等功能联动。
Q:C2200 可以控制多少个轴?
A:C2200 通过 EtherCAT 总线可实现最多 64 轴同步运动控制,支持多机器人协同作业。
Q:C2200 支持哪些机器人类型?
A:C2200 支持六轴串联多关节机器人、四轴 SCARA 机器人、并联机器人等多种机器人类型,并提供定制化适配方案。具体支持的机器人型号请参考技术资料中的"支持的机器人类型"文档。
Q:C2200 的 IO 接口配置如何?
A:C2200 标配 18 路数字输入(DI)+ 18 路数字输出(DO,带光隔),以及 4 路模拟输入(AI,0-10V)+ 4 路模拟输出(AO,0-10V),精度 12bit。
Q:C2200 控制器有哪些网络通讯接口?
A:C2200 配备 1 路千兆网口(RTL8211)和 2 路百兆网口(RTL8152、IP101GR),支持 TCP/IP、Modbus、EtherNet/IP、EtherCAT、CANopen 等多种工业通讯协议。
Q:C2200 控制器支持哪些外部轴类型?
A:C2200 支持旋转轴(O1-O5)、移动轴(L1-L3)等多种外部轴类型,并支持外部轴的点动、联动、速度控制及电子齿轮、随动等功能。具体配置方法请参考"外部轴使用手册"。