Appearance
X01协作控制柜
产品简介
X01 协作控制柜是纳博特面向协作机器人应用推出的高性能控制柜产品,搭载 Intel J6412 处理器,配合纳博特自主研发的控制算法和动力学技术,为协作机器人提供精准的控制体验与流畅的拖动示教功能。
产品优势
动力学技术
X01 协作控制柜集成了纳博特自主研发的动力学技术,支持基于动力学的碰撞检测和动力学前馈功能,无需额外传感器,即可实现毫秒级碰撞检测响应,显著提升机器人带载运行时的拖拽顺滑度和轨迹精度。
拖动示教和轨迹回放
支持拖动示教功能,操作人员可直接拖动机器人记录运动轨迹,系统自动回放,支持平滑轨迹优化,大幅提升示教效率。
产品参数
| 产品 | 参数 |
|---|---|
| CPU | Intel Celeron J6412,2.6 GHz |
| 内存 | 4G |
| 电源输入 | 220V 10A |
| 电源输出 | 48V |
| 功耗 | 1500W / 3000W(可选) |
| 系统 | Linux RT |
| 网口 | 1×EtherCAT,3×Ethernet |
| USB | 2×USB 3.0 |
| COM | 1×RS232,1×RS485,带隔离 |
| I/O | 16×隔离 DI,16×隔离 DO,2AI(0-10V),2AO(0-10V) |
| CAN | 2×CAN |
| 指示灯 | 1×PowerLED,1×HDDLED,1×RUNLED,1×ERR LED |
| 显示 | 1×HDMI,resolution to 4096×2160@30Hz |
| 安装方式 | Desk-Mount(桌面式) |
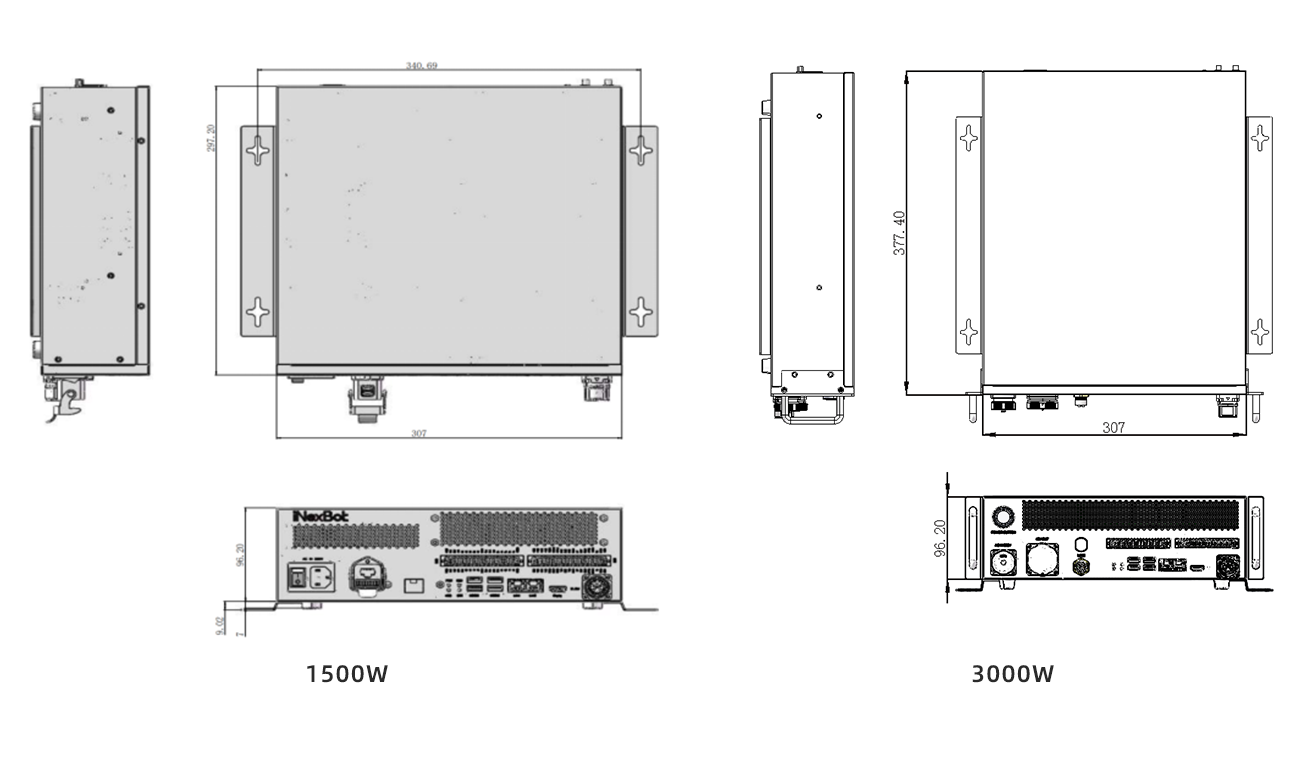
| 尺寸 | 307mm × 297.20mm × 96.20mm |
| 编码器 | A、B 相差分输入,5V 供电输出;32 位有符号计数,2 路 |
| PWM | 2 路输出,单端,占空比 0-100% 可调;电压 5V 或 24V,频率 1MHz 以内 |
| WIFI | (选配)2.4G wifi 模块 |
| 示教器 | (选配)T30-X 协作机器人专用示教器:8 寸 TFT 全触屏,Linux+QT |
| 通讯协议 | EtherCAT、Profinet、Ethernet/IP、CAN、OPC-UA、FinsTCP、TCP/IP、ModbusTCP、ModbusRTU |
| 操作模式 | 示教模式、再现模式、远程模式 |
| 编程方式 | 示教编程、离线编程、拖动示教 |
| 坐标系统 | 关节坐标系、机器人坐标系、工具坐标系、用户坐标系 |
| 结构算法 | 5/6/7 轴协作机器人 |
| 应用 | 弧焊、氩弧焊、激光焊、电阻焊(点焊)、冲压、上下料、激光切割、喷涂、点胶、码垛、传送带跟踪等 |
| 操作温度 | 0℃ ~ 50℃(SSD) |
| 存储温度 | -40 ~ 85℃ |
| 湿度 | 5% ~ 95%,非凝结状态 |
| 振动 | SSD:5~500Hz,1.5Grms operation |
| 机械冲击 | Operation:10G@11ms;Non-operation:30G@11ms |
| 净重 | 6.92Kg |
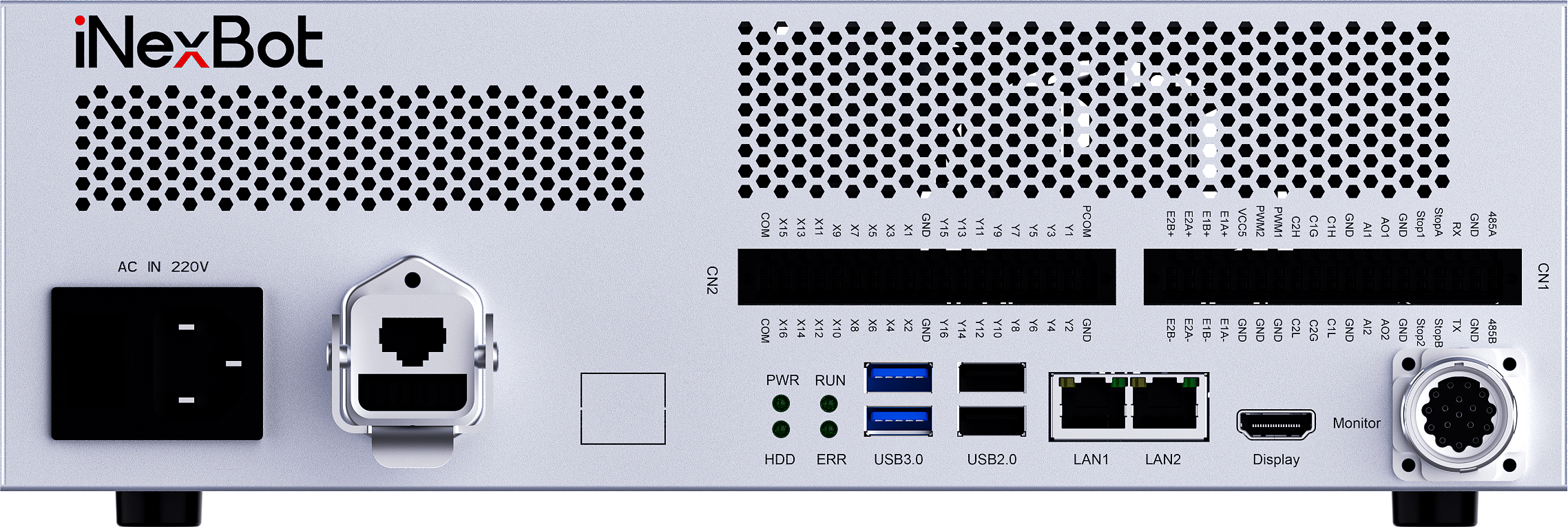
产品接口图示
| 序号 | 内容 |
|---|---|
| 1 | 电源输入接口 |
| 2 | 机器人航插 |
| 3 | DIO |
| 4 | 串口、编码器、PWM、模拟量、CAN |
| 5 | 示教器接口 |
| 6 | HDMI |
| 7 | 以太网接口 |
| 8 | USB |
| 9 | 状态指示灯 |
尺寸图

Q&A
Q:X01 协作控制柜支持几轴机器人?
A:X01 支持 5 轴、6 轴和 7 轴协作机器人。
Q:X01 有哪些功耗版本可选?
A:X01 提供 1500W 和 3000W 两种功耗版本可选,满足不同负载和应用场景的需求。
Q:X01 的通讯接口有哪些?
A:X01 配备 1×EtherCAT、3×Ethernet、2×USB 3.0、1×RS232、1×RS485(带隔离)、2×CAN,以及 16×隔离 DI、16×隔离 DO、2×AI、2×AO。
Q:X01 支持 WIFI 功能吗?
A:WIFI 功能为选配,支持 2.4G wifi 模块。
Q:X01 和 X01-D02 有什么区别?
A:X01 采用 Intel J6412 处理器(X86 架构),主频 2.6GHz,功耗 1500W/3000W 可选,尺寸较大(307×297×96mm),净重 6.92kg;X01-D02 采用 T507 ARM 处理器,主打动力学技术和低功耗设计,更适合协作机器人场景。
Q:X01 可以选配示教器吗?
A:可以。X01 支持选配 T30-X 协作机器人专用示教器,采用 8 寸 TFT 全触屏,搭载 Linux+QT 系统。