Appearance
7000端口使用手册
文档概述
文档目的
本文档详细介绍了7000端口的使用方法,包括端口协议、网络调试助手连接、操作流程和常见问题解答,帮助用户快速上手并正确使用7000端口进行机器人控制和数据交互。
文档结构
本文档包含以下内容:
- 文档概述:介绍文档的目的和结构
- 核心内容:详细说明7000端口的使用方法和操作流程
- 相关资源:提供相关工具和参考文档
- 常见问题:解答用户在使用过程中可能遇到的问题
- 版本历史:记录文档的更新历史
术语定义
| 术语 | 解释 |
|---|---|
| 7000端口 | 机器人控制器用于接收和发送数据的网络端口 |
| CRC | 循环冗余校验,用于验证数据的完整性 |
| HEX | 十六进制,一种数据表示方式 |
| ASCII | 美国信息交换标准代码,用于表示文本字符 |
核心内容
端口协议
| 文档名称 | 大小 | 日期 |
|---|---|---|
| 7000端口协议.pdf | — | — |
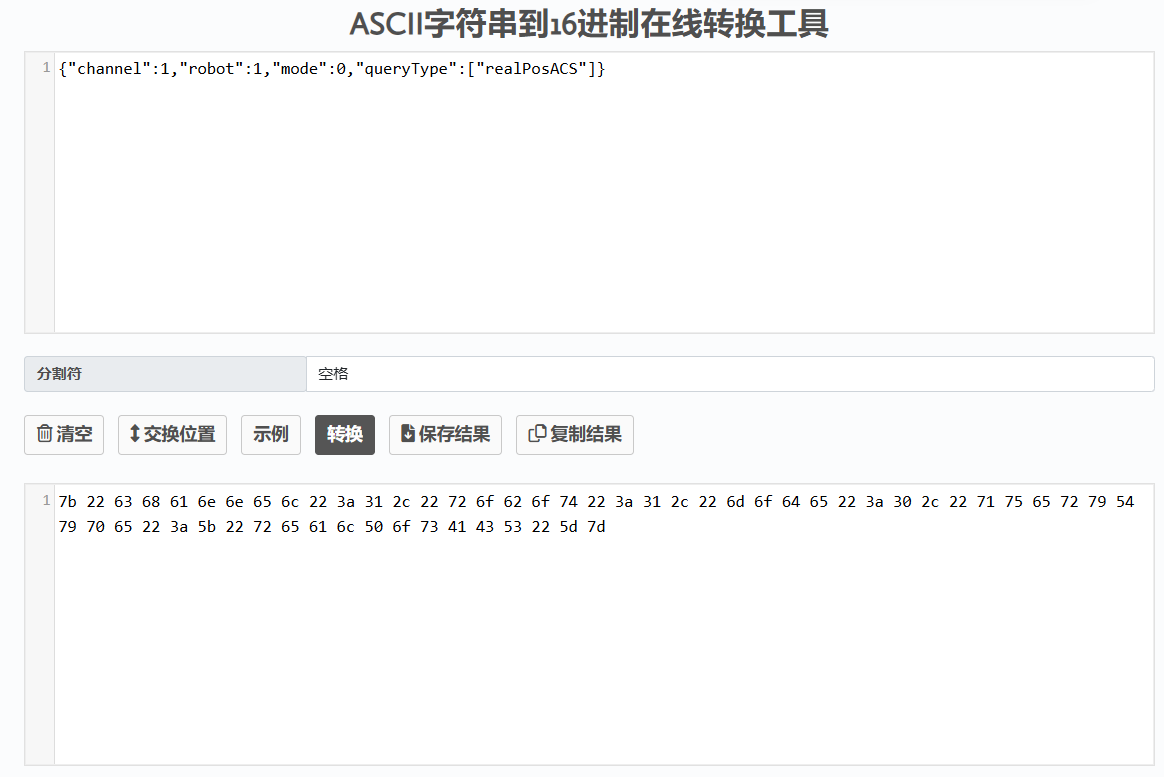
所用的工具推荐
ASCII字符串到16进制在线转换工具 - Coding.Tools
位和字节长度计算器 - 免费数据大小工具 | Whiz.tools
网络调试助手连接
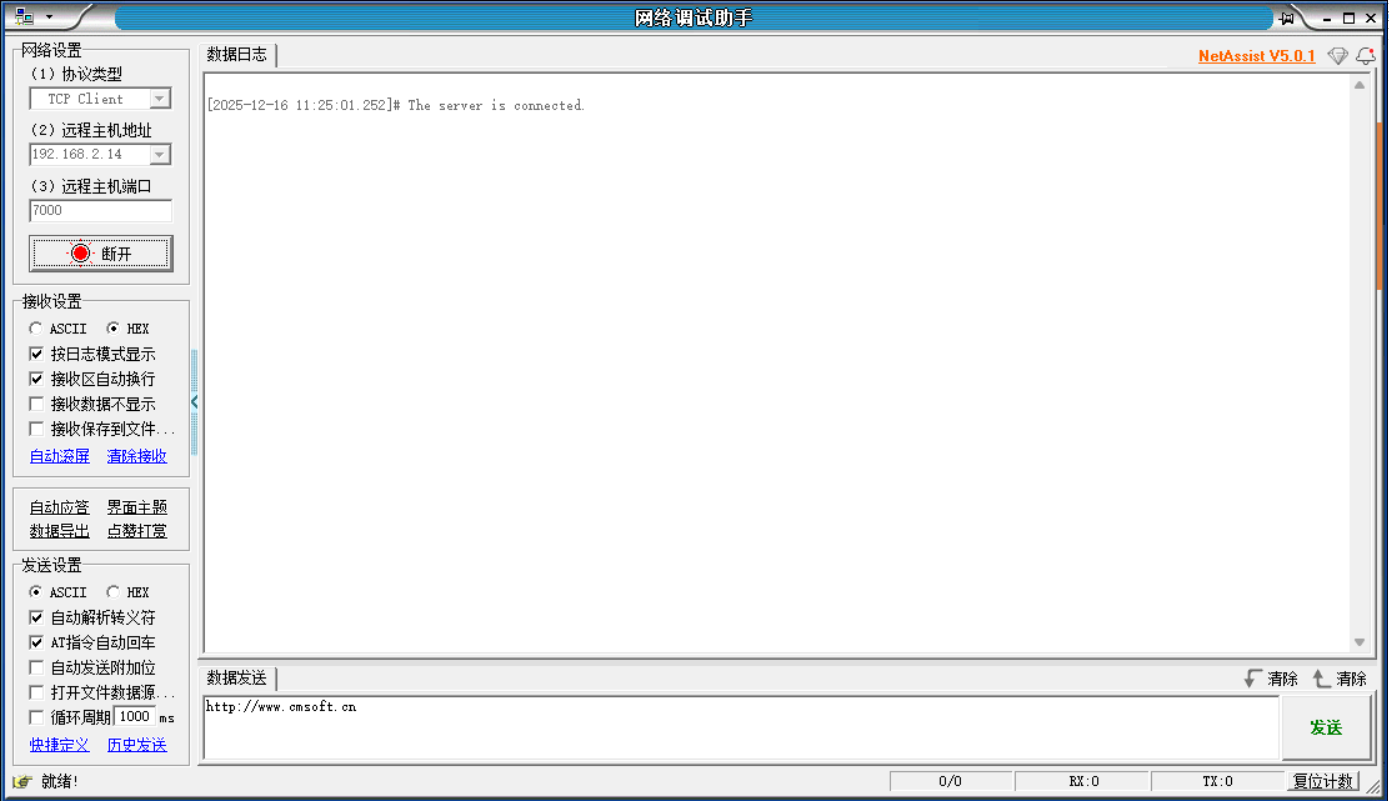
输入控制器IP
端口:7000
操作流程
- 从7000端口协议中找出需要发送对应的协议,比如:查询机器人关节坐标
{"channel":1,"robot":1,"mode":0,"queryType":["realPosACS"]}
- 计算字符串字节长度位和字节长度计算器 - 免费数据大小工具 | Whiz.tools
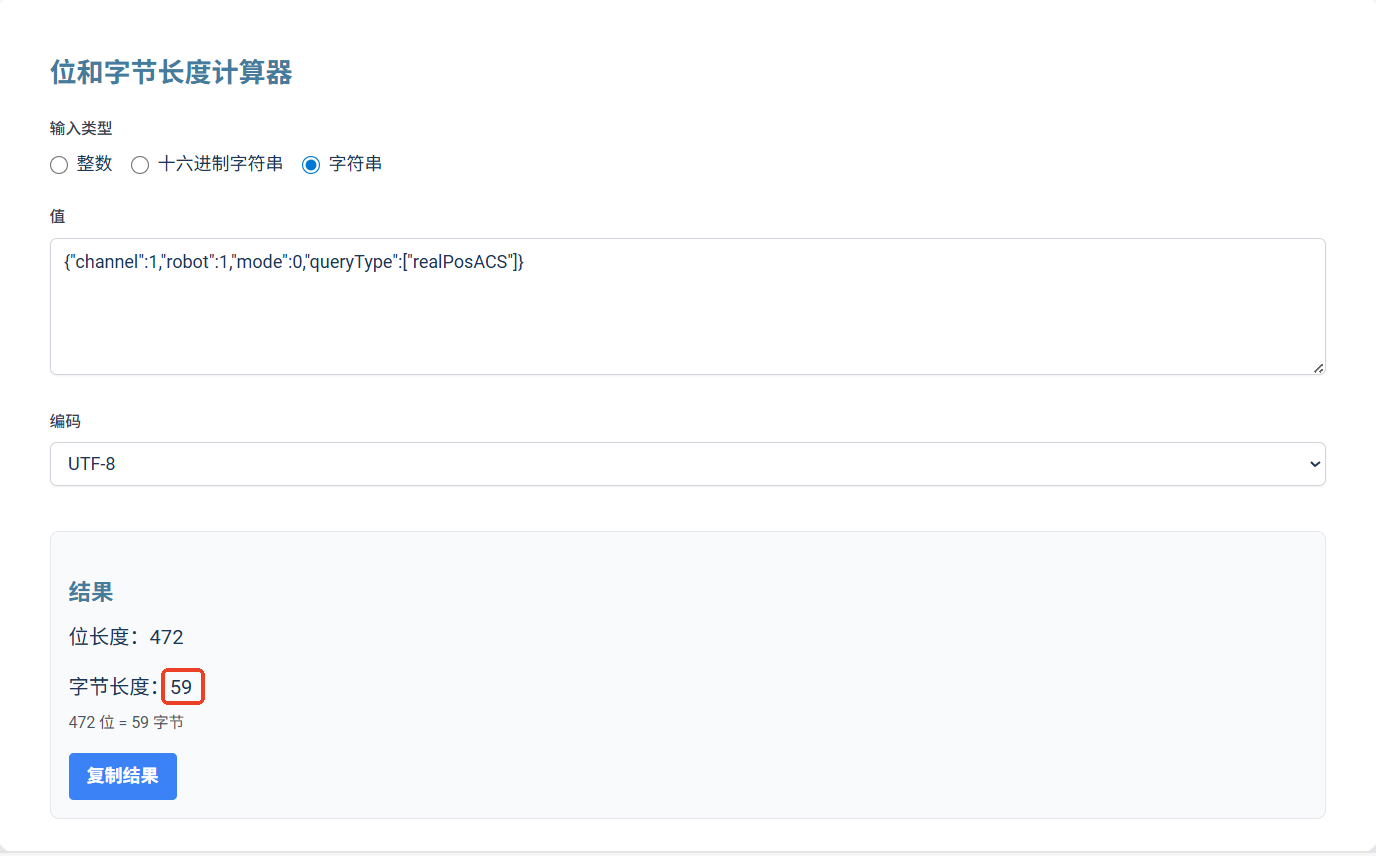
计算出来的字节长度为59,对应的16进制为,3b
- 计算数据CRC

固定帧头:4E 66
字节长度:00 3b
命令字:0x1E00
数据:7b 22 63 68 61 6e 6e 65 6c 22 3a 31 2c 22 72 6f 62 6f 74 22 3a 31 2c 22 6d 6f 64 65 22 3a 30 2c 22 71 75 65 72 79 54 79 70 65 22 3a 5b 22 72 65 61 6c 50 6f 73 41 43 53 22 5d 7d
CRC:90 90 fa 38
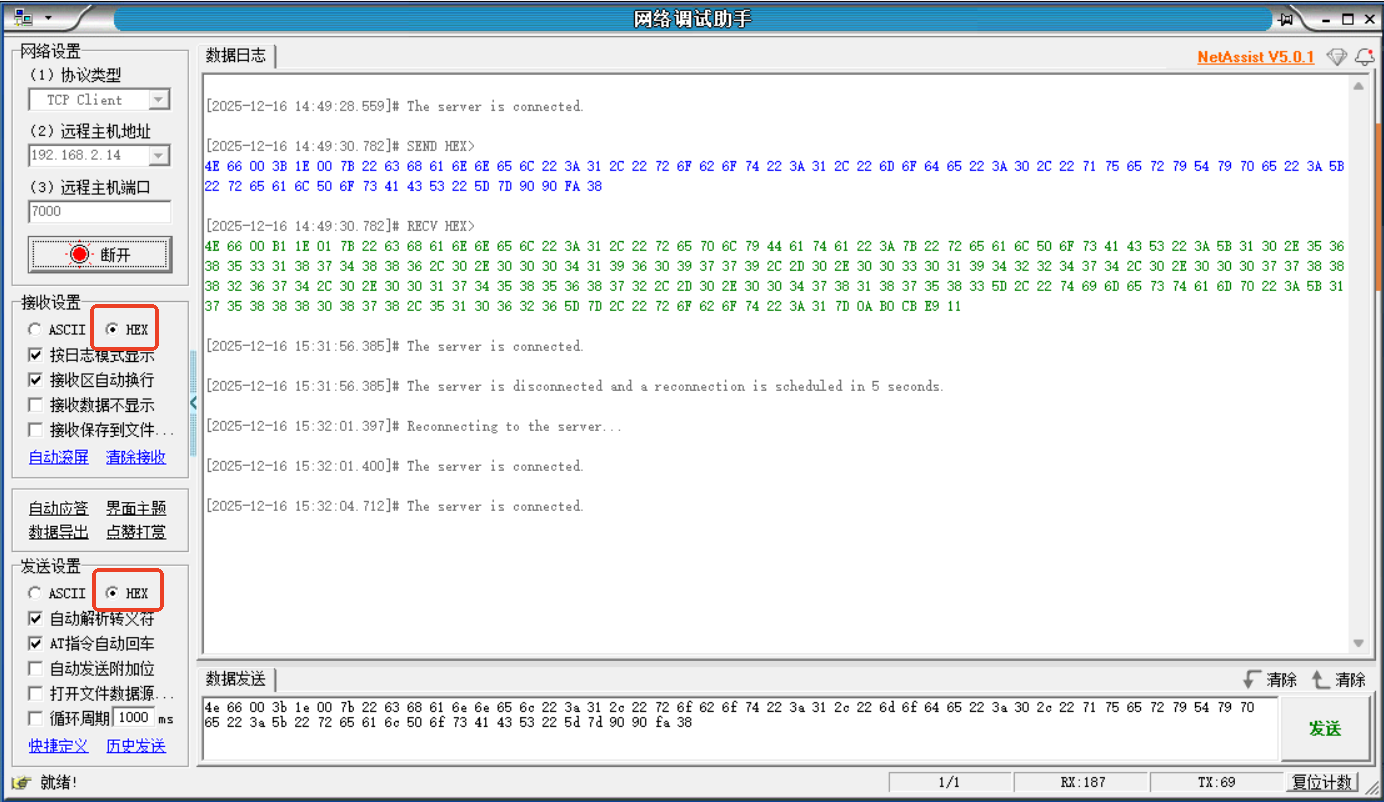
综上最终数据为:
4e 66 00 3b 1e 00 7b 22 63 68 61 6e 6e 65 6c 22 3a 31 2c 22 72 6f 62 6f 74 22 3a 31 2c 22 6d 6f 64 65 22 3a 30 2c 22 71 75 65 72 79 54 79 70 65 22 3a 5b 22 72 65 61 6c 50 6f 73 41 43 53 22 5d 7d 90 90 fa 38
- 数据回复:
{"channel":1,"replyData":{"realPosACS":[10.568531874886,0.000419609779,-0.003019422474,0.000778882674,0.001745856872,-0.00478187583],"timestamp":[1758880991,917968]},"robot":1}
查询的当前坐标"realPosACS":[10.568531874886,0.000419609779,-0.003019422474,0.000778882674,0.001745856872,-0.00478187583],代表了当前机器人1的六个轴的关节坐标
4E 66 00 B1 1E 01 7B 22 63 68 61 6E 6E 65 6C 22 3A 31 2C 22 72 65 70 6C 79 44 61 74 61 22 3A 7B 22 72 65 61 6C 50 6F 73 41 43 53 22 3A 5B 31 30 2E 35 36 38 35 33 31 38 37 34 38 38 36 2C 30 2E 30 30 30 34 31 39 36 30 39 37 37 39 2C 2D 30 2E 30 30 33 30 31 39 34 32 32 34 37 34 2C 30 2E 30 30 30 37 37 38 38 38 32 36 37 34 2C 30 2E 30 30 31 37 34 35 38 35 36 38 37 32 2C 2D 30 2E 30 30 34 37 38 31 38 37 35 38 33 5D 2C 22 74 69 6D 65 73 74 61 6D 70 22 3A 5B 31 37 35 38 38 38 30 38 37 38 2C 35 31 30 36 32 36 5D 7D 2C 22 72 6F 62 6F 74 22 3A 31 7D 0A B0 CB E9 11
示例
查询轴速度
数据发送
{"channel":1,"robot":1,"mode":0,"queryType":["axisVel"]}
4e 66 00 38 1e 00 7b 22 63 68 61 6e 6e 65 6c 22 3a 31 2c 22 72 6f 62 6f 74 22 3a 31 2c 22 6d 6f 64 65 22 3a 30 2c 22 71 75 65 72 79 54 79 70 65 22 3a 5b 22 61 78 69 73 56 65 6c 22 5d 7d 3f 5a c3 d4
数据回复
{"channel":1,"replyData":{"axisVel":[7.986133761819,0.000472061001,0.005733510091,-0.003679549185,-0.001316107488,0.106442472321],"timestamp":[1758891008,795601]},"robot":1}
4E 66 00 AF 1E 01 7B 22 63 68 61 6E 6E 65 6C 22 3A 31 2C 22 72 65 70 6C 79 44 61 74 61 22 3A 7B 22 61 78 69 73 56 65 6C 22 3A 5B 2D 30 2E 30 30 31 32 38 39 31 38 30 34 37 31 2C 30 2E 30 30 30 32 38 38 34 38 31 37 32 33 2C 2D 30 2E 30 30 33 31 38 39 30 35 32 39 35 2C 30 2E 30 30 31 30 32 30 36 30 34 38 38 33 2C 2D 30 2E 30 30 31 32 30 38 36 37 30 31 34 32 2C 2D 30 2E 30 30 33 32 37 36 39 33 32 33 32 34 5D 2C 22 74 69 6D 65 73 74 61 6D 70 22 3A 5B 31 37 35 38 38 39 30 36 37 32 2C 34 32 30 38 36 37 5D 7D 2C 22 72 6F 62 6F 74 22 3A 31 7D 0A 5D 7C B9 48
查询变量GI
数据发送
{"channel":1,"robot":1,"mode":0,"queryType":["numGVar"],"typeCfg":{"numGVar":["GI001"]}}
4E 66 00 58 1E 00 7B 22 63 68 61 6E 6E 65 6C 22 3A 31 2C 22 72 6F 62 6F 74 22 3A 31 2C 22 6D 6F 64 65 22 3A 30 2C 22 71 75 65 72 79 54 79 70 65 22 3A 5B 22 6E 75 6D 47 56 61 72 22 5D 2C 22 74 79 70 65 43 66 67 22 3A 7B 22 6E 75 6D 47 56 61 72 22 3A 5B 22 47 49 30 30 33 22 5D 7D 7D BF DF 25 B0
数据回复
{"channel":1,"replyData":{"numGVar":{"GI001":8},"timestamp":[1759035307,716747]},"robot":1}
4E 66 00 5F 1E 01 7B 22 63 68 61 6E 6E 65 6C 22 3A 31 2C 22 72 65 70 6C 79 44 61 74 61 22 3A 7B 22 6E 75 6D 47 56 61 72 22 3A 7B 22 47 49 30 30 33 22 3A 39 39 38 38 7D 2C 22 74 69 6D 65 73 74 61 6D 70 22 3A 5B 31 37 35 39 30 33 36 32 30 31 2C 34 39 35 32 39 34 5D 7D 2C 22 72 6F 62 6F 74 22 3A 31 7D 0A 37 7F 0E 2B
查询IO
数据发送
{"channel":1,"robot":1,"mode":0,"queryType":["IO"],"typeCfg":{"IO":["DO1","DO5","DO19","DI1","DI5","DI19"]}}
4E 66 00 6C 1E 00 7B 22 63 68 61 6E 6E 65 6C 22 3A 31 2C 22 72 6F 62 6F 74 22 3A 31 2C 22 6D 6F 64 65 22 3A 30 2C 22 71 75 65 72 79 54 79 70 65 22 3A 5B 22 49 4F 22 5D 2C 22 74 79 70 65 43 66 67 22 3A 7B 22 49 4F 22 3A 5B 22 44 4F 31 22 2C 22 44 4F 35 22 2C 22 44 4F 31 39 22 2C 22 44 49 31 22 2C 22 44 49 35 22 2C 22 44 49 31 39 22 5D 7D 7D D3 81 29 EA
数据回复
{"channel":1,"replyData":{"IO":{"DI1":1.0,"DI19":-1.0,"DI5":0.0,"DO1":0.0,"DO19":-1.0,"DO5":1.0},"timestamp":[1759036974,479771]},"robot":1}
4E 66 00 8D 1E 01 7B 22 63 68 61 6E 6E 65 6C 22 3A 31 2C 22 72 65 70 6C 79 44 61 74 61 22 3A 7B 22 49 4F 22 3A 7B 22 44 49 31 22 3A 31 2E 30 2C 22 44 49 31 39 22 3A 2D 31 2E 30 2C 22 44 49 35 22 3A 30 2E 30 2C 22 44 4F 31 22 3A 30 2E 30 2C 22 44 4F 31 39 22 3A 2D 31 2E 30 2C 22 44 4F 35 22 3A 31 2E 30 7D 2C 22 74 69 6D 65 73 74 61 6D 70 22 3A 5B 31 37 35 39 30 33 37 31 39 33 2C 35 33 36 33 30 34 5D 7D 2C 22 72 6F 62 6F 74 22 3A 31 7D 0A 1F 13 C1 4A
查询运行参数(在运动时可查询)
数据发送
{"channel":1,"robot":1,"mode":0,"queryType":["detailedMotionPos"],"typeCfg":{"detailedMotionPos":{"num":10,"optional":["ACS","MCS","time"]}}}
4E 66 00 8D 1E 00 7B 22 63 68 61 6E 6E 65 6C 22 3A 31 2C 22 72 6F 62 6F 74 22 3A 31 2C 22 6D 6F 64 65 22 3A 30 2C 22 71 75 65 72 79 54 79 70 65 22 3A 5B 22 64 65 74 61 69 6C 65 64 4D 6F 74 69 6F 6E 50 6F 73 22 5D 2C 22 74 79 70 65 43 66 67 22 3A 7B 22 64 65 74 61 69 6C 65 64 4D 6F 74 69 6F 6E 50 6F 73 22 3A 7B 22 6E 75 6D 22 3A 31 30 2C 22 6F 70 74 69 6F 6E 61 6C 22 3A 5B 22 41 43 53 22 2C 22 4D 43 53 22 2C 22 74 69 6D 65 22 5D 7D 7D 7D CD 70 08 39
数据回复
{"channel":1,"replyData":{"detailedMotionPos":{"data":[{"ACS":[-3.737246137402,0.0,-0.0,0.0,-0.0,0.0],"MCS":[863.715856927365,-56.417844557178,922.9601,3.14159265359,0.0,0.065227250055],"time":[1759052356,264138361]},{"ACS":[-3.745019920319,0.0,-0.0,0.0,-0.0,0.0],"MCS":[863.708194311146,-56.535031370193,922.9601,3.14159265359,0.0,0.065362928162],"time":[1759052356,265137446]},{"ACS":[-3.752793703237,0.0,-0.0,0.0,-0.0,0.0],"MCS":[863.700515795314,-56.652217142481,922.9601,3.14159265359,0.0,0.06549860627],"time":[1759052356,266137262]},{"ACS":[-3.760567486154,0.0,-0.0,0.0,-0.0,0.0],"MCS":[863.692821380008,-56.769401871883,922.9601,3.14159265359,0.0,0.065634284377],"time":[1759052356,267138339]},{"ACS":[-3.768341269071,0.0,-0.0,0.0,-0.0,0.0],"MCS":[863.685111065371,-56.886585556243,922.9601,3.14159265359,0.0,0.065769962484],"time":[1759052356,268136751]},{"ACS":[-3.776115051988,0.0,-0.0,0.0,-0.0,0.0],"MCS":[863.677384851544,-57.003768193403,922.9601,3.14159265359,0.0,0.065905640591],"time":[1759052356,269137036]},{"ACS":[-3.783888834905,0.0,-0.0,0.0,-0.0,0.0],"MCS":[863.669642738671,-57.120949781207,922.9601,-3.14159265359,0.0,0.066041318699],"time":[1759052356,270136564]},{"ACS":[-3.791662617822,0.0,-0.0,0.0,-0.0,0.0],"MCS":[863.661884726892,-57.238130317497,922.9601,3.14159265359,0.0,0.066176996806],"time":[1759052356,271137149]},{"ACS":[-3.799436400739,0.0,-0.0,0.0,-0.0,0.0],"MCS":[863.654110816351,-57.355309800116,922.9601,3.14159265359,0.0,0.066312674913],"time":[1759052356,272137121]},{"ACS":[-3.807210183656,0.0,-0.0,0.0,-0.0,0.0],"MCS":[863.646321007192,-57.472488226908,922.9601,3.14159265359,0.0,0.06644835302],"time":[1759052356,273137922]}],"num":10},"timestamp":[1759052356,804742]},"robot":1}
4E 66 06 C9 1E 01 7B 22 63 68 61 6E 6E 65 6C 22 3A 31 2C 22 72 65 70 6C 79 44 61 74 61 22 3A 7B 22 64 65 74 61 69 6C 65 64 4D 6F 74 69 6F 6E 50 6F 73 22 3A 7B 22 64 61 74 61 22 3A 5B 7B 22 41 43 53 22 3A 5B 2D 31 32 2E 32 35 37 33 31 32 32 31 34 35 35 37 2C 30 2E 30 2C 2D 30 2E 30 2C 30 2E 30 2C 2D 30 2E 30 2C 30 2E 30 5D 2C 22 4D 43 53 22 3A 5B 38 34 35 2E 38 32 35 32 39 31 32 36 37 30 30 34 2C 2D 31 38 33 2E 37 35 39 37 31 30 38 38 37 31 37 33 2C 39 32 32 2E 39 36 30 31 2C 33 2E 31 34 31 35 39 32 36 35 33 35 39 2C 30 2E 30 2C 30 2E 32 31 33 39 33 30 34 35 35 35 38 39 5D 2C 22 74 69 6D 65 22 3A 5B 31 37 35 39 30 35 34 30 39 32 2C 35 35 39 33 33 31 35 39 5D 7D 2C 7B 22 41 43 53 22 3A 5B 2D 31 32 2E 32 36 35 30 38 35 39 39 37 34 37 35 2C 30 2E 30 2C 2D 30 2E 30 2C 30 2E 30 2C 2D 30 2E 30 2C 30 2E 30 5D 2C 22 4D 43 53 22 3A 5B 38 34 35 2E 38 30 30 33 35 31 33 31 32 31 31 33 2C 2D 31 38 33 2E 38 37 34 34 36 39 31 37 30 30 32 2C 39 32 32 2E 39 36 30 31 2C 33 2E 31 34 31 35 39 32 36 35 33 35 39 2C 30 2E 30 2C 30 2E 32 31 34 30 36 36 31 33 33 36 39 36 5D 2C 22 74 69 6D 65 22 3A 5B 31 37 35 39 30 35 34 30 39 32 2C 35 36 39 33 34 31 36 33 5D 7D 2C 7B 22 41 43 53 22 3A 5B 2D 31 32 2E 32 37 32 38 35 39 37 38 30 33 39 32 2C 30 2E 30 2C 2D 30 2E 30 2C 30 2E 30 2C 2D 30 2E 30 2C 30 2E 30 5D 2C 22 4D 43 53 22 3A 5B 38 34 35 2E 37 37 35 33 39 35 37 38 37 32 36 34 2C 2D 31 38 33 2E 39 38 39 32 32 34 30 36 38 30 30 35 2C 39 32 32 2E 39 36 30 31 2C 33 2E 31 34 31 35 39 32 36 35 33 35 39 2C 30 2E 30 2C 30 2E 32 31 34 32 30 31 38 31 31 38 30 33 5D 2C 22 74 69 6D 65 22 3A 5B 31 37 35 39 30 35 34 30 39 32 2C 35 37 39 33 32 38 37 36 5D 7D 2C 7B 22 41 43 53 22 3A 5B 2D 31 32 2E 32 38 30 36 33 33 35 36 33 33 30 39 2C 30 2E 30 2C 2D 30 2E 30 2C 30 2E 30 2C 2D 30 2E 30 2C 30 2E 30 5D 2C 22 4D 43 53 22 3A 5B 38 34 35 2E 37 35 30 34 32 34 36 39 32 39 31 38 2C 2D 31 38 34 2E 31 30 33 39 37 35 35 37 39 30 31 35 2C 39 32 32 2E 39 36 30 31 2C 33 2E 31 34 31 35 39 32 36 35 33 35 39 2C 30 2E 30 2C 30 2E 32 31 34 33 33 37 34 38 39 39 31 31 5D 2C 22 74 69 6D 65 22 3A 5B 31 37 35 39 30 35 34 30 39 32 2C 35 38 39 33 33 32 34 34 5D 7D 2C 7B 22 41 43 53 22 3A 5B 2D 31 32 2E 32 38 38 34 30 37 33 34 36 32 32 36 2C 30 2E 30 2C 2D 30 2E 30 2C 30 2E 30 2C 2D 30 2E 30 2C 30 2E 30 5D 2C 22 4D 43 53 22 3A 5B 38 34 35 2E 37 32 35 34 33 38 30 32 39 35 33 34 2C 2D 31 38 34 2E 32 31 38 37 32 33 37 30 30 39 33 39 2C 39 32 32 2E 39 36 30 31 2C 33 2E 31 34 31 35 39 32 36 35 33 35 39 2C 30 2E 30 2C 30 2E 32 31 34 34 37 33 31 36 38 30 31 38 5D 2C 22 74 69 6D 65 22 3A 5B 31 37 35 39 30 35 34 30 39 32 2C 35 39 39 33 32 35 38 31 5D 7D 2C 7B 22 41 43 53 22 3A 5B 2D 31 32 2E 32 39 36 31 38 31 31 32 39 31 34 33 2C 30 2E 30 2C 2D 30 2E 30 2C 30 2E 30 2C 2D 30 2E 30 2C 30 2E 30 5D 2C 22 4D 43 53 22 3A 5B 38 34 35 2E 37 30 30 34 33 35 37 39 37 35 37 32 2C 2D 31 38 34 2E 33 33 33 34 36 38 34 33 31 36 36 32 2C 39 32 32 2E 39 36 30 31 2C 33 2E 31 34 31 35 39 32 36 35 33 35 39 2C 30 2E 30 2C 30 2E 32 31 34 36 30 38 38 34 36 31 32 35 5D 2C 22 74 69 6D 65 22 3A 5B 31 37 35 39 30 35 34 30 39 32 2C 36 30 39 33 33 38 34 39 5D 7D 2C 7B 22 41 43 53 22 3A 5B 2D 31 32 2E 33 30 33 39 35 34 39 31 32 30 36 2C 30 2E 30 2C 2D 30 2E 30 2C 30 2E 30 2C 2D 30 2E 30 2C 30 2E 30 5D 2C 22 4D 43 53 22 3A 5B 38 34 35 2E 36 37 35 34 31 37 39 39 37 34 39 32 2C 2D 31 38 34 2E 34 34 38 32 30 39 37 36 39 30 37 35 2C 39 32 32 2E 39 36 30 31 2C 33 2E 31 34 31 35 39 32 36 35 33 35 39 2C 30 2E 30 2C 30 2E 32 31 34 37 34 34 35 32 34 32 33 32 5D 2C 22 74 69 6D 65 22 3A 5B 31 37 35 39 30 35 34 30 39 32 2C 36 31 39 33 33 30 30 36 5D 7D 2C 7B 22 41 43 53 22 3A 5B 2D 31 32 2E 33 31 31 37 32 38 36 39 34 39 37 37 2C 30 2E 30 2C 2D 30 2E 30 2C 30 2E 30 2C 2D 30 2E 30 2C 30 2E 30 5D 2C 22 4D 43 53 22 3A 5B 38 34 35 2E 36 35 30 33 38 34 36 32 39 37 35 36 2C 2D 31 38 34 2E 35 36 32 39 34 37 37 31 31 30 36 33 2C 39 32 32 2E 39 36 30 31 2C 33 2E 31 34 31 35 39 32 36 35 33 35 39 2C 30 2E 30 2C 30 2E 32 31 34 38 38 30 32 30 32 33 34 5D 2C 22 74 69 6D 65 22 3A 5B 31 37 35 39 30 35 34 30 39 32 2C 36 32 39 33 32 36 35 34 5D 7D 2C 7B 22 41 43 53 22 3A 5B 2D 31 32 2E 33 31 39 35 30 32 34 37 37 38 39 34 2C 30 2E 30 2C 2D 30 2E 30 2C 30 2E 30 2C 2D 30 2E 30 2C 30 2E 30 5D 2C 22 4D 43 53 22 3A 5B 38 34 35 2E 36 32 35 33 33 35 36 39 34 38 32 32 2C 2D 31 38 34 2E 36 37 37 36 38 32 32 35 35 35 31 35 2C 39 32 32 2E 39 36 30 31 2C 2D 33 2E 31 34 31 35 39 32 36 35 33 35 39 2C 30 2E 30 2C 30 2E 32 31 35 30 31 35 38 38 30 34 34 37 5D 2C 22 74 69 6D 65 22 3A 5B 31 37 35 39 30 35 34 30 39 32 2C 36 33 39 33 33 36 38 33 5D 7D 2C 7B 22 41 43 53 22 3A 5B 2D 31 32 2E 33 32 37 32 37 36 32 36 30 38 31 31 2C 30 2E 30 2C 2D 30 2E 30 2C 30 2E 30 2C 2D 30 2E 30 2C 30 2E 30 5D 2C 22 4D 43 53 22 3A 5B 38 34 35 2E 36 30 30 32 37 31 31 39 33 31 35 34 2C 2D 31 38 34 2E 37 39 32 34 31 33 34 30 30 33 32 2C 39 32 32 2E 39 36 30 31 2C 33 2E 31 34 31 35 39 32 36 35 33 35 39 2C 30 2E 30 2C 30 2E 32 31 35 31 35 31 35 35 38 35 35 34 5D 2C 22 74 69 6D 65 22 3A 5B 31 37 35 39 30 35 34 30 39 32 2C 36 34 39 33 34 38 31 39 5D 7D 5D 2C 22 6E 75 6D 22 3A 31 30 7D 2C 22 74 69 6D 65 73 74 61 6D 70 22 3A 5B 31 37 35 39 30 35 34 30 39 32 2C 33 30 38 39 38 35 5D 7D 2C 22 72 6F 62 6F 74 22 3A 31 7D 0A C5 81 F1 9F
发送独立点位(关节点)
数据发送
{"robot":1,"targetMode":0,"cfg":{"coord":"ACS","extMove":0,"sync":0,"speed":50,"acc":50},"targetPos":[10,0,0,0,0,0]}
4E 66 00 74 1E 02 7B 22 72 6F 62 6F 74 22 3A 31 2C 22 74 61 72 67 65 74 4D 6F 64 65 22 3A 30 2C 22 63 66 67 22 3A 7B 22 63 6F 6F 72 64 22 3A 22 41 43 53 22 2C 22 65 78 74 4D 6F 76 65 22 3A 30 2C 22 73 79 6E 63 22 3A 30 2C 22 73 70 65 65 64 22 3A 35 30 2C 22 61 63 63 22 3A 35 30 7D 2C 22 74 61 72 67 65 74 50 6F 73 22 3A 5B 31 30 2C 30 2C 30 2C 30 2C 30 2C 30 5D 7D B9 D9 C7 09
数据回复
{"cause":"","robot":1,"size":1,"success":true}
4E 66 00 2F 1E 03 7B 22 63 61 75 73 65 22 3A 22 22 2C 22 72 6F 62 6F 74 22 3A 31 2C 22 73 69 7A 65 22 3A 31 2C 22 73 75 63 63 65 73 73 22 3A 74 72 75 65 7D 0A 5F F6 80 3
发送连续点位(关节)
数据发送
{"robot":1,"targetMode":1,"sendMode":0,"cfg":{"coord":"ACS","extMove":0,"sync":0,"speed":50,"acc":50},"targetVec":[{"pos":[1,2,3,4,5,6],"timeStamp":1000},{"pos":[11,12,13,14,15,16],"timeStamp":2000},{"pos":[21,22,23,24,25,26],"timeStamp":4000}]}
4E 66 00 F5 1E 02 7B 22 72 6F 62 6F 74 22 3A 31 2C 22 74 61 72 67 65 74 4D 6F 64 65 22 3A 31 2C 22 73 65 6E 64 4D 6F 64 65 22 3A 30 2C 22 63 66 67 22 3A 7B 22 63 6F 6F 72 64 22 3A 22 41 43 53 22 2C 22 65 78 74 4D 6F 76 65 22 3A 30 2C 22 73 79 6E 63 22 3A 30 2C 22 73 70 65 65 64 22 3A 35 30 2C 22 61 63 63 22 3A 35 30 7D 2C 22 74 61 72 67 65 74 56 65 63 22 3A 5B 7B 22 70 6F 73 22 3A 5B 31 2C 32 2C 33 2C 34 2C 35 2C 36 5D 2C 22 74 69 6D 65 53 74 61 6D 70 22 3A 31 30 30 30 7D 2C 7B 22 70 6F 73 22 3A 5B 31 31 2C 31 32 2C 31 33 2C 31 34 2C 31 35 2C 31 36 5D 2C 22 74 69 6D 65 53 74 61 6D 70 22 3A 32 30 30 30 7D 2C 7B 22 70 6F 73 22 3A 5B 32 31 2C 32 32 2C 32 33 2C 32 34 2C 32 35 2C 32 36 5D 2C 22 74 69 6D 65 53 74 61 6D 70 22 3A 34 30 30 30 7D 5D 7D B4 53 24 15
数据回复
{"cause":"","robot":1,"size":1,"success":true}
4E 66 00 2F 1E 03 7B 22 63 61 75 73 65 22 3A 22 22 2C 22 72 6F 62 6F 74 22 3A 31 2C 22 73 69 7A 65 22 3A 32 2C 22 73 75 63 63 65 73 73 22 3A 74 72 75 65 7D 0A B5 70 5D 55
变量/IO控制
数据发送
{"numGVar":{"GA001":true,"GI033":88,"GD666":9.99},"IO":{"DO6":1,"DO13":0}}
4E 66 00 4A 1E 04 7B 22 6E 75 6D 47 56 61 72 22 3A 7B 22 47 41 30 30 31 22 3A 74 72 75 65 2C 22 47 49 30 33 33 22 3A 38 38 2C 22 47 44 36 36 36 22 3A 39 2E 39 39 7D 2C 22 49 4F 22 3A 7B 22 44 4F 36 22 3A 31 2C 22 44 4F 31 33 22 3A 30 7D 7D EF 09 F2 79
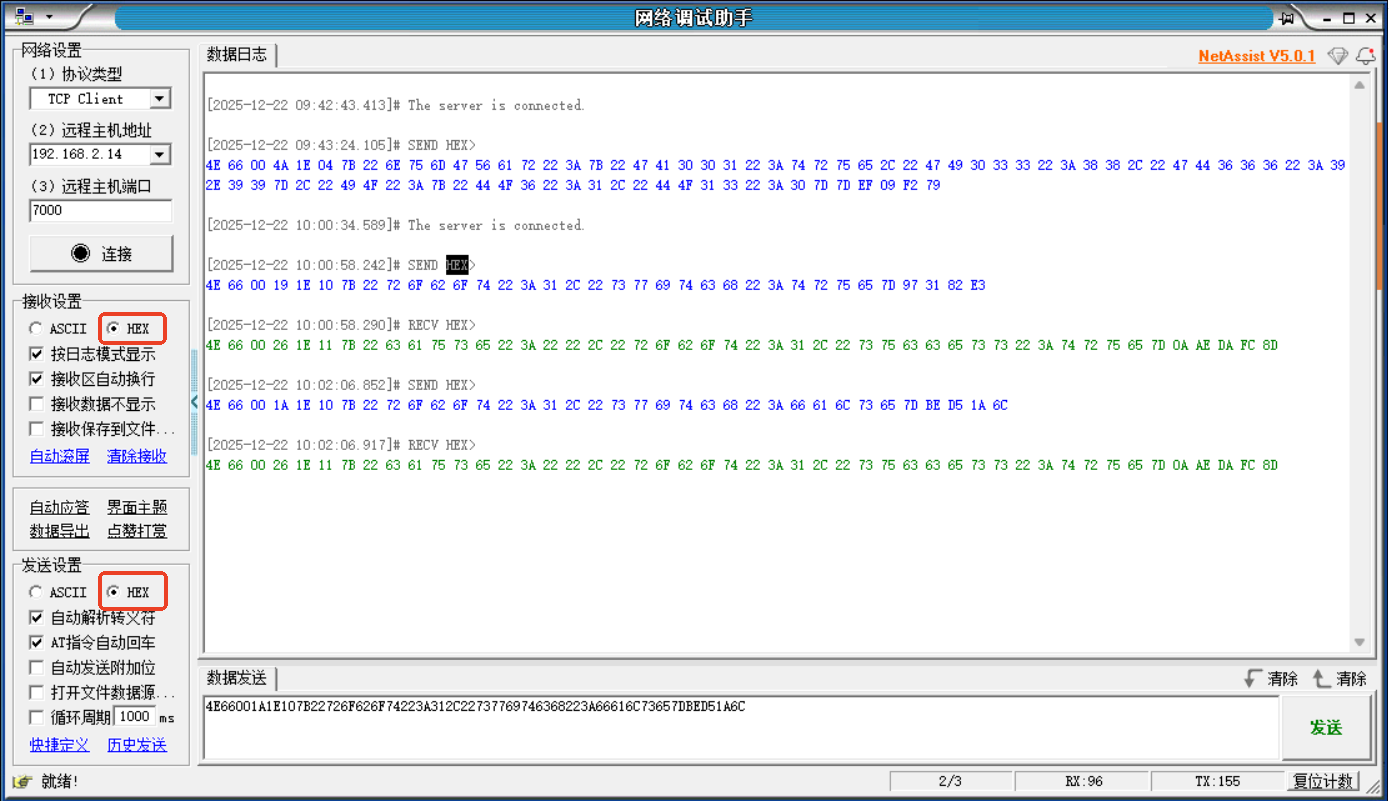
伺服控制
数据发送
{"robot":1,"switch":true}
4E 66 00 19 1E 10 7B 22 72 6F 62 6F 74 22 3A 31 2C 22 73 77 69 74 63 68 22 3A 74 72 75 65 7D 97 31 82 E3
数据回复
{"cause":"","robot":1,"success":true}
4E 66 00 26 1E 11 7B 22 63 61 75 73 65 22 3A 22 22 2C 22 72 6F 62 6F 74 22 3A 31 2C 22 73 75 63 63 65 73 73 22 3A 74 72 75 65 7D 0A AE DA FC 8D
常见问题
格式问题
问题:发送数据后没有收到回复,如何排查格式问题?
解答:
- 排查固定帧头是否为4E 66
- 检查字节长度是否准确并且已转换为16进制,可用工具排查
- 检查所属功能命令字是否准确,具体查看端口协议
- 检查数据内容为ASCII码时符号和数据是否为英文,可用JSON校验工具排查
- 检查数据CRC是否准确,可用工具排查
网络调试助手问题
问题:使用网络调试助手发送数据后没有收到回复,如何解决?
解答:
- 确保发送和接收均为HEX格式
- 检查网络连接是否正常
- 确认控制器IP地址和端口号(7000)是否正确
- 查看网络调试助手的格式设置是否准确
相关资源
参考文档
相关工具
- ASCII字符串到16进制在线转换工具 - Coding.Tools
- 位和字节长度计算器 - 免费数据大小工具 | Whiz.tools
- CRC(循环冗余校验)在线计算_ip33.com
- JSON格式校验器-JSON在线工具
版本历史
| 版本 | 日期 | 变更内容 | 作者 |
|---|---|---|---|
| 1.0.0 | 2026-04-13 | 初始版本 | iNexBot |