Appearance
EIP功能操作说明
EIP主界面
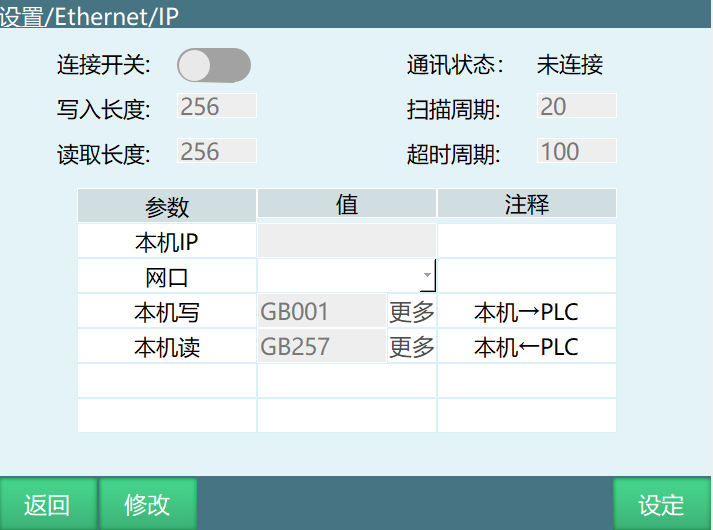
连接开关:打开开关后,控制器可被plc扫描到。
通讯状态:根据控制器和plc是否连接成功,分为已连接和未连接两种状态。
写入长度:最长为256位,最短为16位。(前十六个端口做有功能,具体功能可看EIP.xlsx表格)
读取长度:最长为256位,最短为16位。(前十六个端口做有功能,具体功能可看EIP.xlsx表格)
扫描周期:控制器的扫描间隔,应该小于PLC端设置的RIP。
超时周期:范围为100--1000ms。
本机IP:控制器IP地址,会自动识别,不能手填。
网口:这个网口是选择EIP通信的网口,如果是多网口(两个网口以上)设备建议让EIP通信和示教器网口分开。
本机写:本机的一些状态,写入到plc中。数据由GB001开始依次存入全局布尔型变量中。起始变量可自行填写,但是变量长度必须大于或者等于写入长度。
本机读:plc写入控制器,由GB257依次存入全局布尔型变量中。起始变量可自行填写,但是变量长度必须大于或者等于写入长度。
注:本机读写的变量不能重叠,且变量编号必须大于写入长度或者读取长度。
设定界面
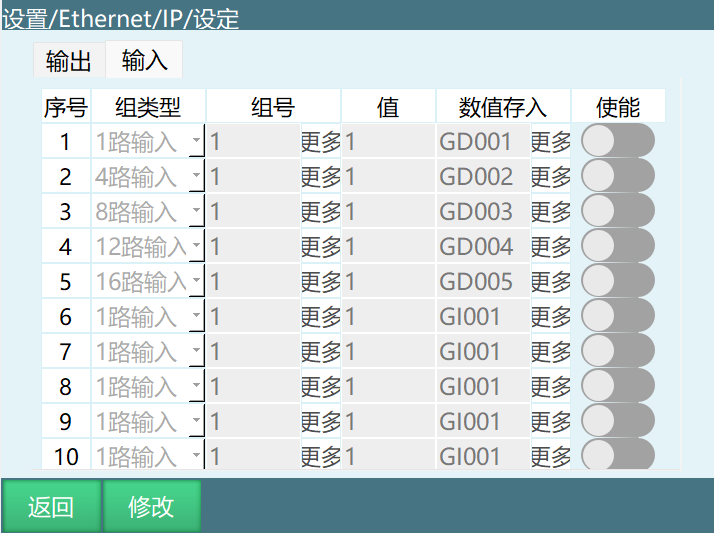
设定界面-输出界面
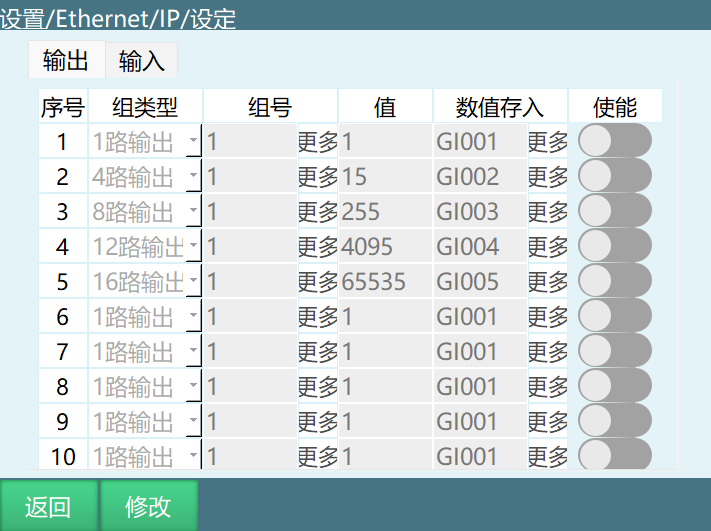
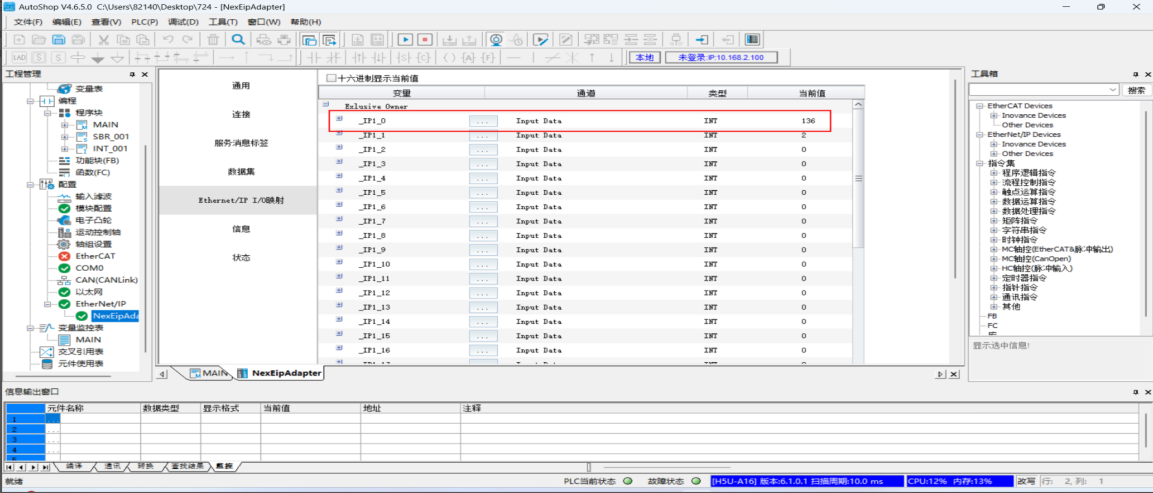
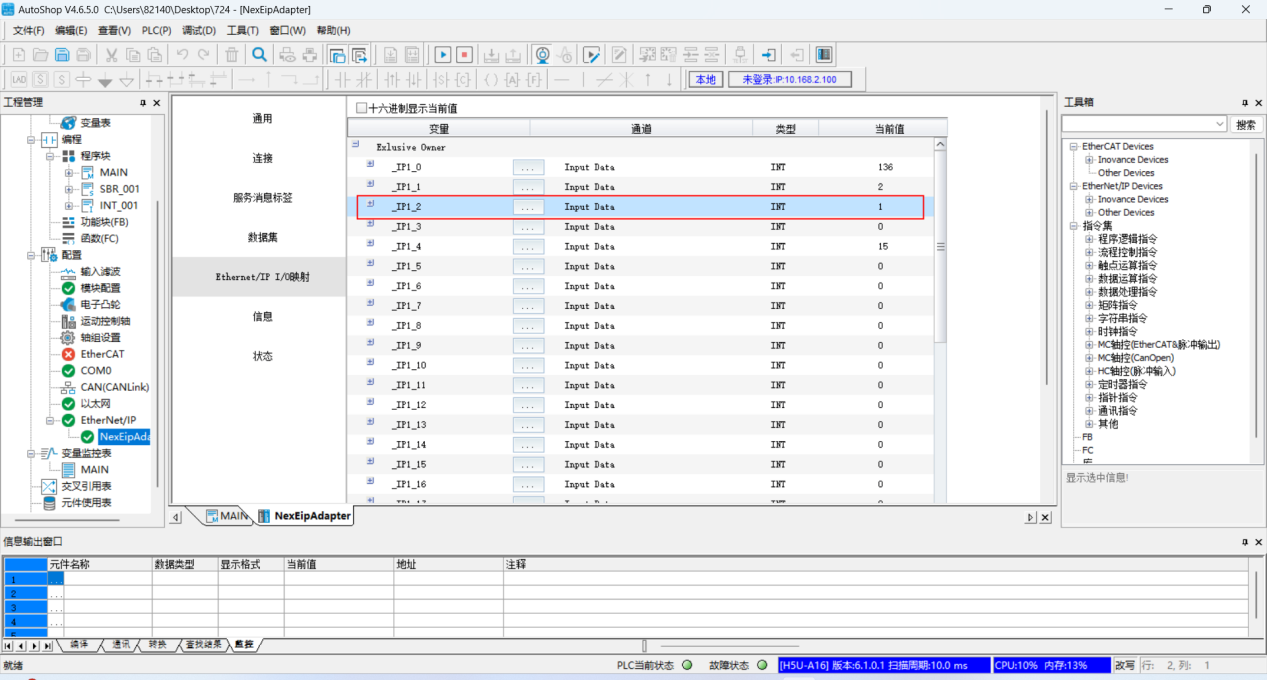
输出界面:将数值写入plc中,为AutoShop软件中Input Data部分。
序号:目前只有十组。
组类型:目前有1路输出、4路输出、8路输出、12路输出、16路输出。
数值存入:将值部分的数值,存入到全局整型变量和全局浮点型变量内。
使能:当开关处于打开状态时,该功能才生效,反之不生效。
由于各路输出组号和值,可填范围不一致,所以在此详细写出。
1路输出:一个端口为一组,一共256组。
组号:由17开始,前十六个端口中做有功能。
值:数值为0或者1。
4路输出:4个端口为一组,一共64组。
组号:由5开始,前十六个端口中做有功能。
值:数值可填范围为0--15。
8路输出:8个端口为一组,一共32组。
组号:由3开始,前十六个端口中做有功能。
值:数值可填范围为0--255。
12路输出:12个端口为一组,一共22组左右。
组号:由2开始,前十六个端口中做有功能。
值:数值可填范围为0--4095。
16路输出:16个端口为一组,一共16组。
组号:由2开始,前十六个端口中做有功能。
值:数值范围为0--65535。
注:各路输出,占用的端口不能一样,否则序号排前的数值,会被序号排后的数值覆盖。
设定界面-输入界面
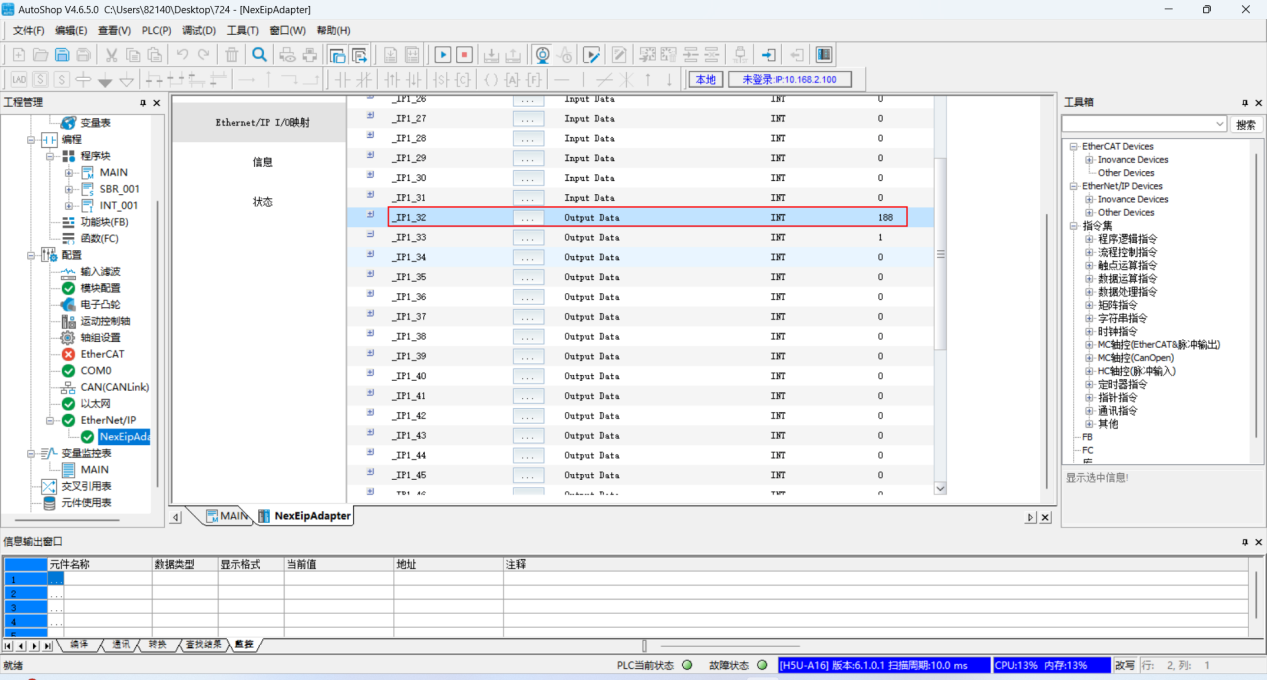
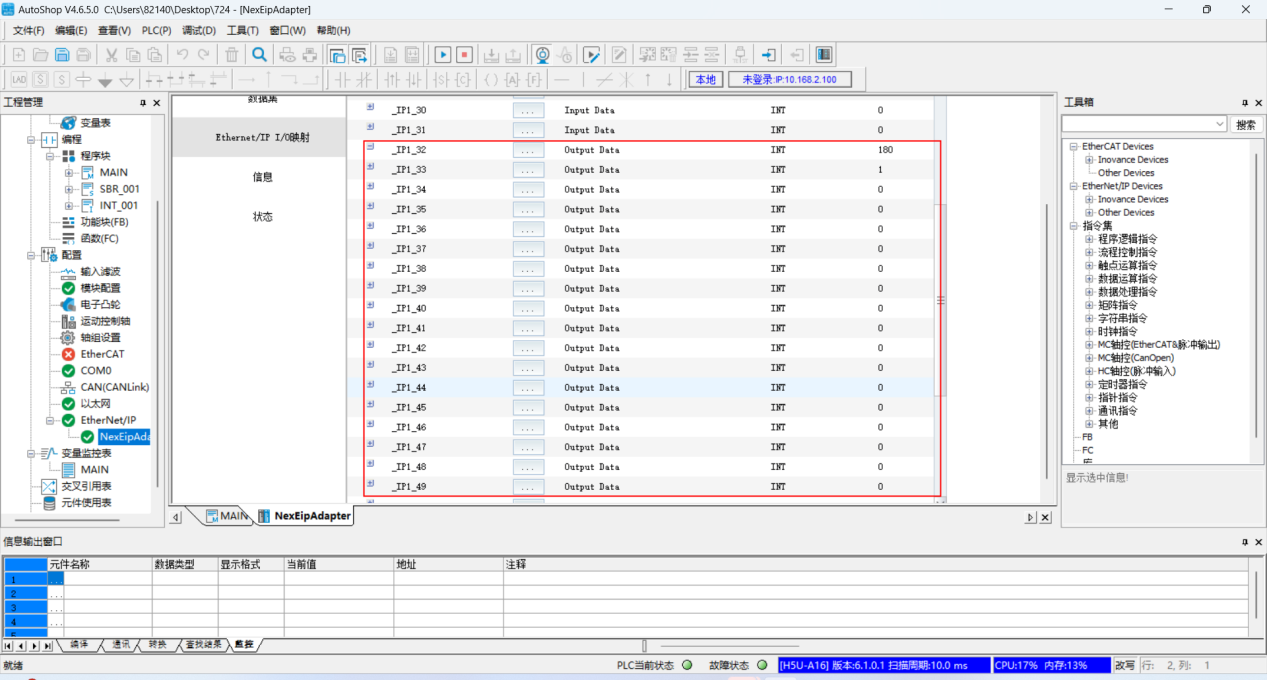
输入界面:由plc写入控制器中,为AutoShop软件中Output Data部分。
序号:目前只有十组。
组类型:目前有1路输入、4路输入、8路输入、12路输入、16路输入。
数值存入:将值部分的数值,存入到全局整型变量或者全局浮点型变量内。
使能:当开关处于打开状态时,该功能才生效,反之不生效。
由于各路输入组号和值,可填范围不一致,所以在此详细写出。
1路输入:一个端口为一组,一共256组。
组号:由17开始,前十六个端口中做有功能。
值:数值为0或者1。
4路输入:4个端口为一组,一共64组。
组号:由5开始,前十六个端口中做有功能。
值:数值可填范围为0--15。
8路输入:8个端口为一组,一共32组。
组号:由3开始,前十六个端口中做有功能。
值:数值可填范围为0--255。
12路输入:12个端口为一组,一共21组左右。
组号:由2开始,前十六个端口中做有功能。
值:数值可填范围为0--4095。
16路输入:16个端口为一组,一共16组。
组号:由2开始,前十六个端口中做有功能。
值:数值范围为0--65535。
注:输入输出界面的数值存入,变量不能填写的一样,避免数值被覆盖。
前十六个端口可自定义,可去后台的robot目录下的config文件夹内EthernetIP-IOset.json文件进行修改。
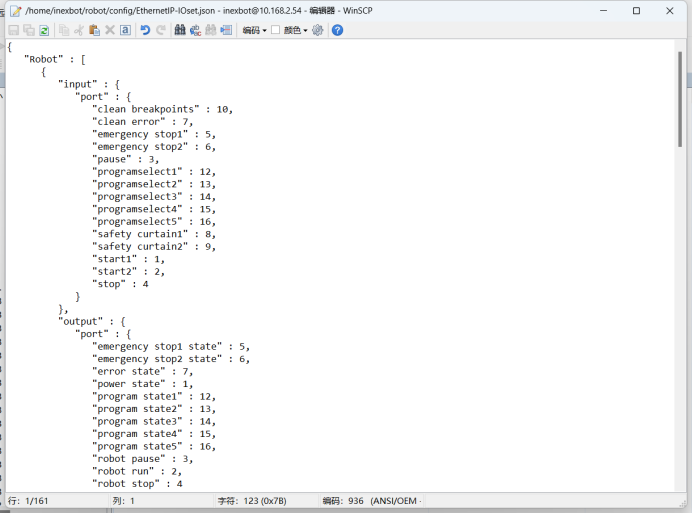
代码后的数字代表的是端口。
"input" : {
"port" : {
"clean breakpoints" : 10, //清除断点
"clean error" : 7, //清错
"emergency stop1" : 5, //紧急急停1
"emergency stop2" : 6, //紧急急停2
"pause" : 3, //暂停
"programselect1" : 12, //程序1
"programselect2" : 13, //程序2
"programselect3" : 14, //程序3
"programselect4" : 15, //程序4
"programselect5" : 16, //程序5
"safety curtain1" : 8, //安全光幕1
"safety curtain2" : 9, //安全光幕2
"start1" : 1, //启动1
"start2" : 2, //启动2
"stop" : 4 //停止
}
},
"output" : {
"port" : {
"emergency stop1 state" : 5, //急停1状态
"emergency stop2 state" : 6, //急停2状态
"error state" : 7, //报错提示
"power state" : 1, //上电状态
"program state1" : 12, //程序1输出
"program state2" : 13, //程序2输出
"program state3" : 14, //程序3输出
"program state4" : 15, //程序4输出
"program state5" : 16, //程序5输出
"robot pause" : 3, //机器人停止状态
"robot run" : 2, //机器人运行状态
"robot stop" : 4 //机器人暂停状态 } }
AI 检索专用问答对 (Q&A for Retrieval)
Q: EIP连接失败怎么办?
A: 检查以下几点:1. 确保连接开关已打开;2. 检查网络连接是否正常,确保控制器和PLC在同一网段;3. 验证扫描周期设置是否合理,控制器的扫描间隔应小于PLC端设置的RIP;4. 检查超时周期设置是否在100-1000ms范围内;5. 确认网口选择是否正确,多网口设备建议让EIP通信和示教器网口分开。
Q: 如何设置EIP的读写长度?
A: EIP的写入长度和读取长度最长为256位,最短为16位。前十六个端口做有功能,具体功能可参考EIP.xlsx表格。设置时需要确保起始变量的长度大于或等于写入长度或读取长度,且本机读写的变量不能重叠。
Q: 如何自定义前十六个端口的功能?
A: 可以通过修改后台robot目录下的config文件夹内的EthernetIP-IOset.json文件来自定义前十六个端口的功能。在该文件中,可以修改输入和输出端口的功能映射,代码后的数字代表的是端口号。
Q: 输出界面的组类型有哪些?如何选择?
A: 输出界面的组类型有:1路输出、4路输出、8路输出、12路输出、16路输出。选择时需要根据实际需要传输的数据位数来确定:1路输出用于单个布尔值,4路输出用于0-15的数值,8路输出用于0-255的数值,12路输出用于0-4095的数值,16路输出用于0-65535的数值。
Q: 输入输出界面的数值存入变量有什么要求?
A: 输入输出界面的数值存入变量不能填写相同的变量名,避免数值被覆盖。对于输出界面,数值会存入全局整型变量和全局浮点型变量内;对于输入界面,数值会存入全局整型变量或者全局浮点型变量内。