Appearance
修改机器人点位
核心内容
注意事项
当目标点位的坐标为直角、工具或者用户坐标时,修改的点位工具要和实际使用工具一致,否则程序运行时出错!
当目标点位的坐标为用户坐标时,修改的点位用户要和实际使用用户一致,否则程序运行时出错!
如何修改点位
将当前位置设为目标点位
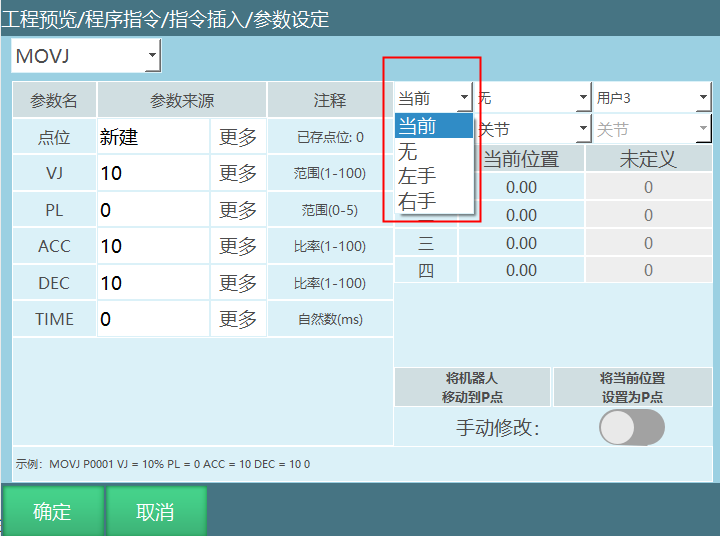
插入指令选择新建一个P变量或者GP变量;
如果点位选择"新建",需要点击参数设定界面的确定按钮,点击确定后一个新的局部位置变量新建成功,选中新建的变量,点击【修改】,点击【将当前位置设置为P点】;
如果选择的是GP点,在参数设定界面可以直接点击【将当前位置设置为GP点】;
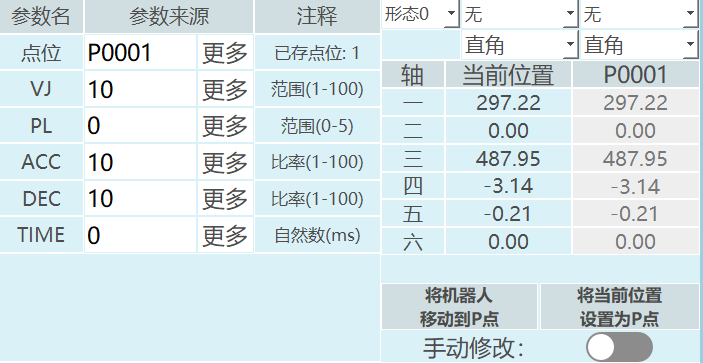
【【将当前位置设置为P/GP点】:如果当前点位是关节点位,会将当前的关节点位坐标写入目标变量;当前点位是直角点位,会将当前的直角点位坐标写入目标变量;当前点位是工具点位,会将当前的工具点位坐标写入目标变量;当前点位是用户点位,会将当前的用户点位坐标写入目标变量;
提示框弹出"是否继续修改点位",点击【确定】将当前位置存入目标变量,点击【取消】不会记录机器人当前点位到目标变量,可以继续移动机器人到想要的点位,参数界面"当前位置"在移动机器人时坐标是一直变化的。
手动修改目标点位
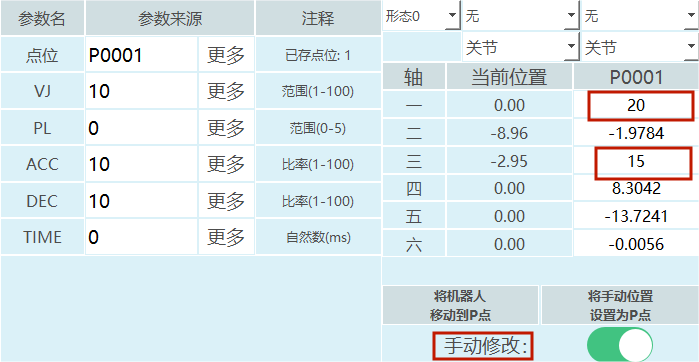
手动修改机器人位置时需要先打开"手动修改"的开关,这样点位才会修改成功。
打开手动修改按钮,修改目标变量目标轴的点位。填入需要的坐标值,如上图所示将P0001目标变量的关节坐标一轴手动修改为20,三轴手动修改为15,点击【将手动位置设为P/GP点】提示框弹出"是否继续修改点位",点击【确定】将修改后的点位位置存入目标变量,小白条提示修改成功。点击【取消】可以继续修改目标轴的点位;
【将机器人移动到P/GP点】将机器人移动到选择的目标变量存入的位置,例如:在一个作业文件里面插入了多条运动指令,如果想要单独移动某一个点位可选中指令在程序指令界面点击【修改】,按下上电使能,点击【将机器人移动到P/GP点】,机器人到达目标点位。
目标点位信息参数
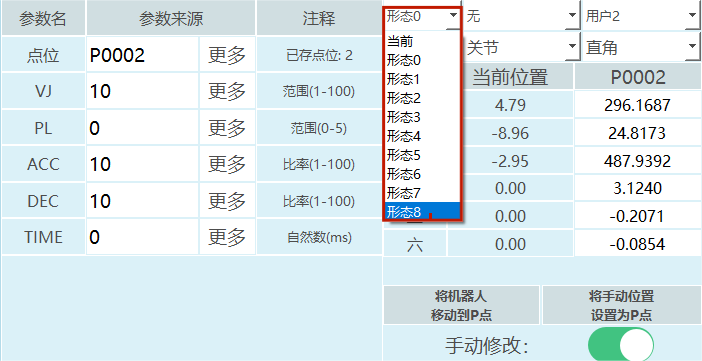
形态
形态范围:[0,8]
机型为6轴串联多关节机器人有形态参数,如形态参数选择当前,则控制系统自动通过转换方式计算出机器人当前的形态值,形态值是通过机器人1、3、5轴的关节点位来计算的,如果范围在[-90,+90]之间则为1,不在为0;
形态值为机器人1轴、3轴、5轴位置的二进制转换为十进制然后再加1。
例如:某个六轴机器人1轴为59度、2轴为69度、3轴为79度、4轴为89度、5轴为99度、6轴为109度;
结果如下:二进制数110 = 十进制6,形态值为十进制结果再加1,该点位形态值为7。
| 轴 | 1轴 | 3轴 | 5轴 |
|---|---|---|---|
| 二进制数值 | 1 | 1 | 0 |
- 机型为四轴SCARA机器人时有左右手参数。
修改目标点位形态:
打开手动修改按钮,点击形态,选择需要修改的形态值;
修改完成后,点击【确定】形态值修改成功。
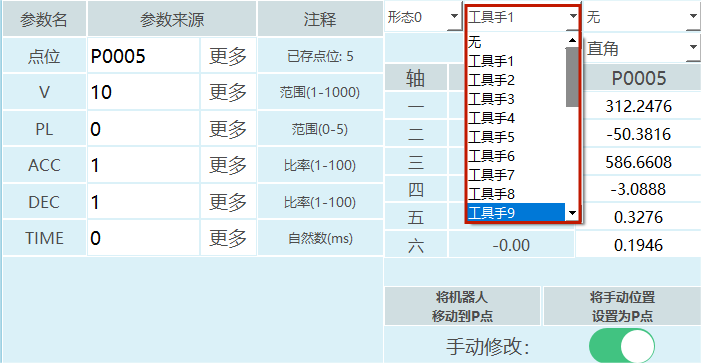
工具手
范围:[0,999]。
修改目标点位的工具手:
打开手动修改按钮,点击工具手,选择需要修改的工具手号;
修改完成后,点击【确定】工具手修改成功。
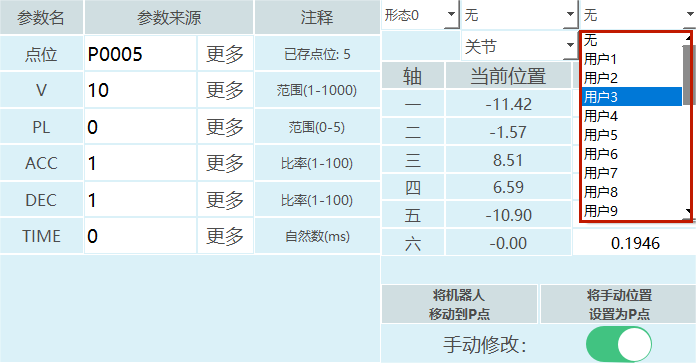
用户坐标
坐标范围:[0,999]
修改目标点位的用户坐标
打开手动修改按钮,点击用户,选择需要修改的用户坐标号;
修改完成后,点击【确定】用户坐标号修改成功。
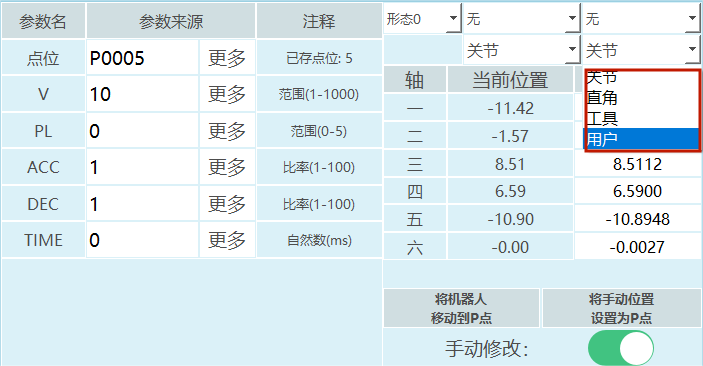
坐标系
打开手动修改按钮,点击目标点位坐标;
选择需要修改的坐标系修改完成后,点击【确定】坐标系修改成功。
AI 检索专用问答对 (Q&A for Retrieval)
Q:如何将当前位置设为目标点位?
A :插入指令选择新建一个P变量或者GP变量,然后点击【将当前位置设置为P/GP点】,确认后即可将当前位置存入目标变量。
Q:如何手动修改目标点位?
A :打开"手动修改"的开关,修改目标变量目标轴的点位,填入需要的坐标值,然后点击【将手动位置设为P/GP点】,确认后即可修改成功。
Q:什么是形态参数?
A :形态参数是6轴串联多关节机器人的参数,范围为[0,8],通过机器人1、3、5轴的关节点位计算得出,是这些轴位置的二进制转换为十进制然后再加1的结果。
Q:修改点位时需要注意什么?
A :当目标点位的坐标为直角、工具或者用户坐标时,修改的点位工具要和实际使用工具一致;当目标点位的坐标为用户坐标时,修改的点位用户要和实际使用用户一致,否则程序运行时出错!
Q:如何将机器人移动到已设置的点位?
A :选中指令在程序指令界面点击【修改】,按下上电使能,点击【将机器人移动到P/GP点】,机器人会到达目标点位。
版本历史
| 版本 | 日期 | 变更内容 | 作者 |
|---|---|---|---|
| 1.0.0 | 2026-04-07 | 初始版本 | tongmengyuan123 |