Appearance
六轴协作机器人增加形态参数
形态值规则:
1、J1轴与J2轴形成一个平面,如果末端法兰中心在平面前方,A=1,否则A=0;(末端法兰中心就是指机器人的末端,末端在J1和J2形成的平面前A=1,否则A=0)
2、如果大臂小臂夹角小于180,B=1,否则B=0;(大小臂指的是2轴和3轴)
3、如果J4<O(俯视向下)【默认J4关节限制-180~+180】 , C=l,否则C=0;
形态值计算公式:形态值=A*4+B*2+C+1
例如;
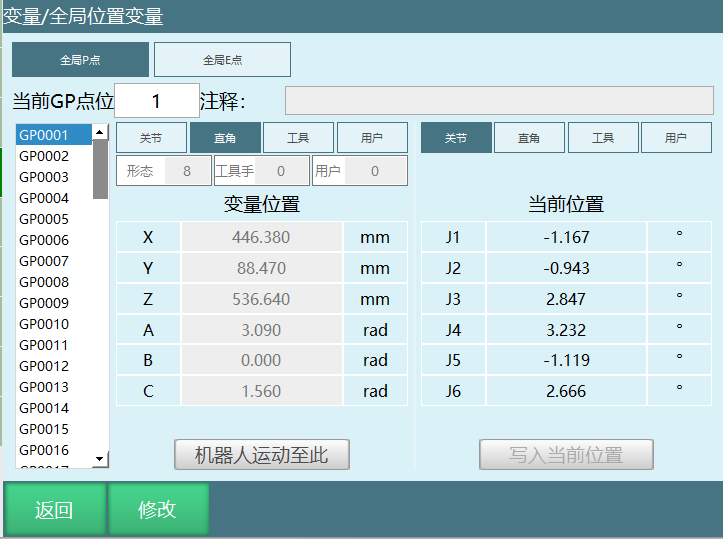
J1= 60°,大小臂夹角小于180,J4<0(向下俯视),则A=1,B=1,C=1,形态值=1*4 +1*2+1 +1 =8
注意:上述姿态都是基于机器人零点的基础上算的;
测试:
1:找到一个点,计算该点的形态值,设定形态值后,走点到点,看看实际各轴是否符合形态值规则,可以多找几个点
2:多个形态值的点,可以形态值之间走一走,看看实际各轴是否符合形态值规则
例如:
- 首先找一个点
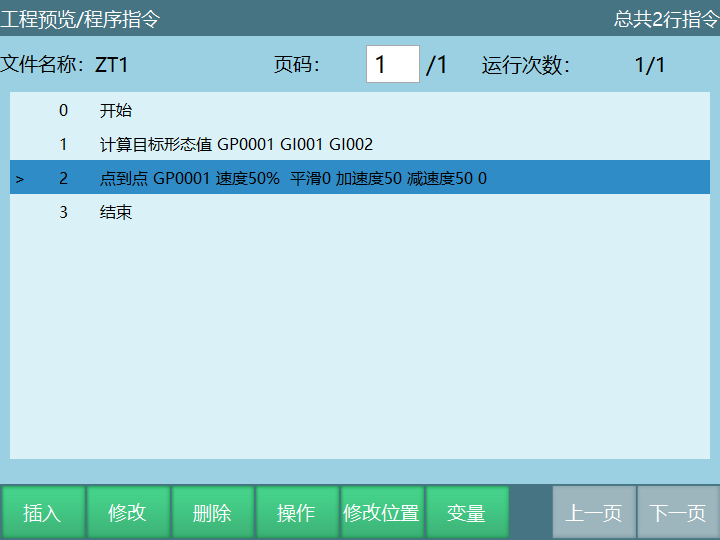
- 然后用计算目标形态值计算出此点有几个形态

- 由此可见,有四个形态,分别是形2、形态4、形态6、形态8;

- 用点到点依次走计算出来的形态,查看每个形态的机器人姿态,看看实际各轴是否符合形态值规则
AI 检索专用问答对 (Q&A for Retrieval)
Q:六轴协作机器人的形态值是怎么计算的?
A: 形态值由 A、B、C 三个条件共同决定,计算公式为:
形态值 = A*4 + B*2 + C + 1
其中:
- A:J1轴与J2轴形成一个平面,若末端法兰中心在平面前方,则 A=1,否则 A=0
- B:若大臂和小臂夹角小于 180°,则 B=1,否则 B=0
- C:若 J4 < 0(俯视向下),则 C=1,否则 C=0
例如:
当 A=1、B=1、C=1 时,
形态值 = 1*4 + 1*2 + 1 + 1 = 8
Q:文档中的形态值 8 是怎么得出来的?
A:
示例条件为:
- J1 = 60°
- 大臂小臂夹角小于 180°,所以 B=1
- J4 < 0(向下俯视),所以 C=1
- 末端法兰中心在 J1 和 J2 形成的平面前方,所以 A=1
代入公式:
形态值 = A*4 + B*2 + C + 1
即:
形态值 = 1*4 + 1*2 + 1 + 1 = 8
因此该姿态对应的形态值为 8。
Q:六轴协作机器人增加形态参数后,应该如何测试是否生效?
A: 可以按以下两种方式测试:
找到一个点,先计算该点的形态值。
设定不同形态值后执行点到点运动,观察机器人各轴实际姿态是否符合形态值规则。对于同一个点计算出的多个形态值,可以让机器人在这些形态值之间相互切换运动。
检查每次运动后的实际姿态,确认是否与对应形态规则一致。
例如文档中的测试结果显示,一个点可计算出 4 个形态,分别是 形态2、形态4、形态6、形态8,可依次运行这些形态进行验证。