Appearance
六维力传感器配置文件自动适配说明
功能概述
适配六维力传感器时,控制器通过EtherCAT通讯进行数据读取,需要配置传感器的PDO接口。本指南以蓝点传感器为例,详细介绍配置文件的自动适配步骤。
配置步骤
第一步:获取传感器基础信息
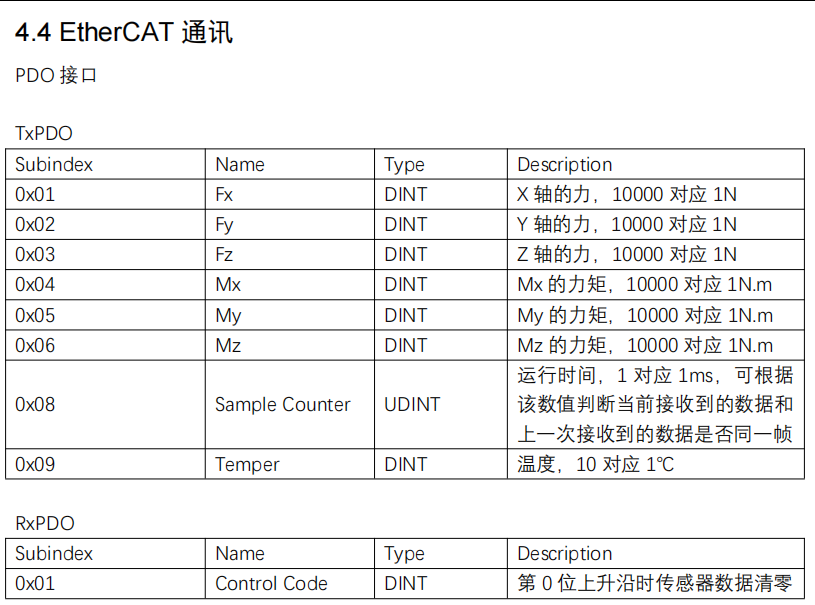
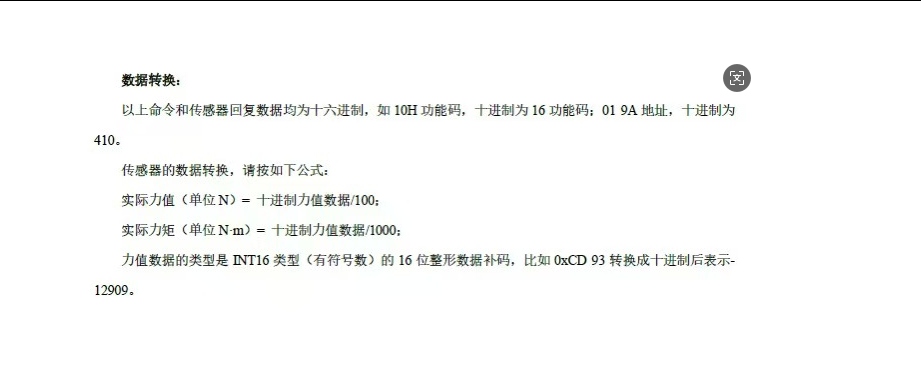
从传感器说明手册中查找与EtherCAT通讯相关的六维力信息:
- 力和力矩名称:如蓝点传感器的力和力矩名称为 Fx、Fy、Fz、Mx、My、Mz
- 数据类型:通常为 DINT 型
- 单位:力的单位为 N,力矩的单位为 N·m
注意:不同厂商的力和力矩单位可能不同,例如坤维传感器的单位是 KG,需要根据实际情况填写参数。
第二步:配置厂商信息和单位参数
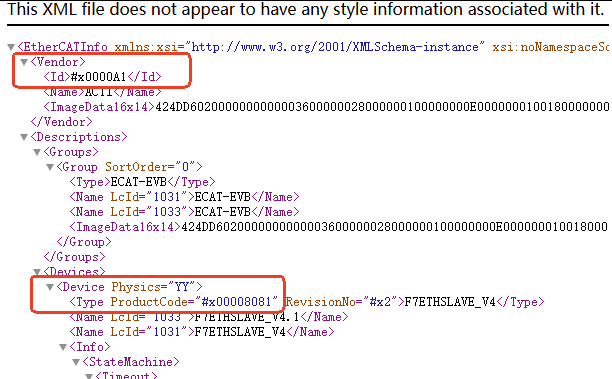
在XML文件开头查找厂商和产品信息:
- VendorID:厂商识别码,需将16进制数据转换为10进制后填入配置文件
- ProductCode:产品代码,同样需将16进制数据转换为10进制
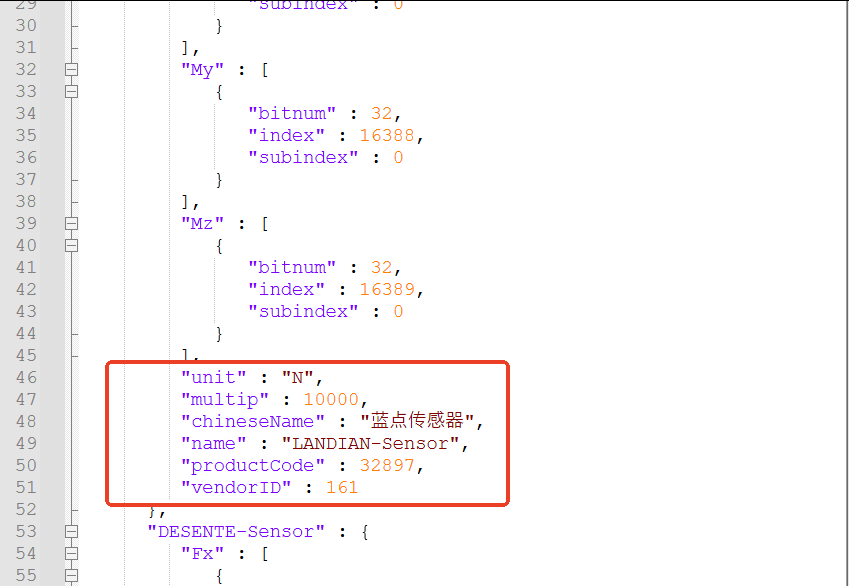
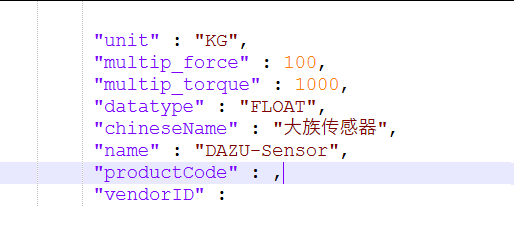
- unit:数据单位,如"N"或"KG"
- multip:乘数参数,用于数值转换(如蓝点传感器每10000代表1N)
特殊配置说明
注意事项:
力和力矩分开转换:若厂家力和力矩的转换公式不同,需删除"multip"节点,添加"multip_force"和"multip_torque"节点,分别填写力和力矩的转换公式。
数据类型配置:控制器默认数据类型为INT,但部分厂家使用浮点型。此时需在配置文件内添加"datatype"节点,支持FLOAT和DOUBLE两种类型。
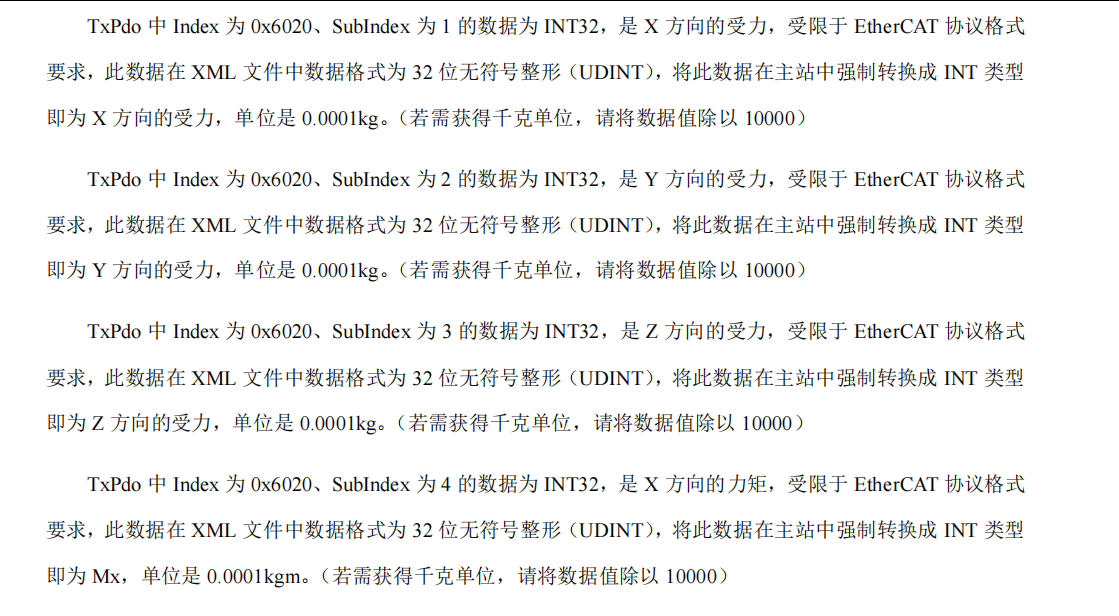
第三步:配置PDO接口参数
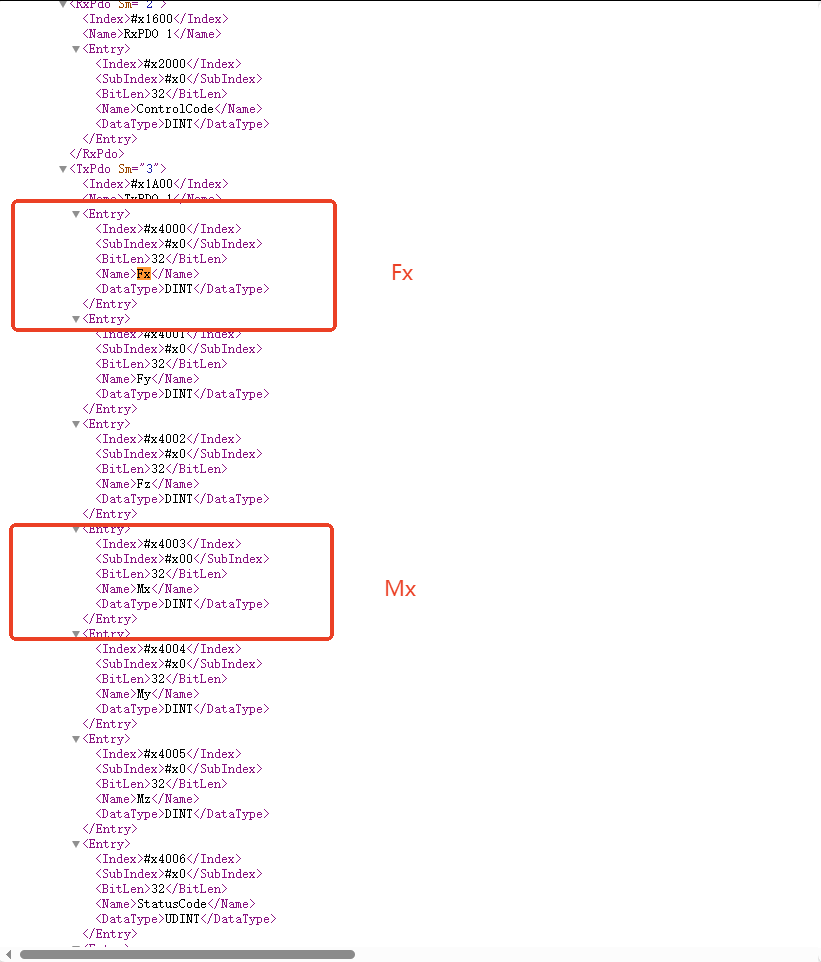
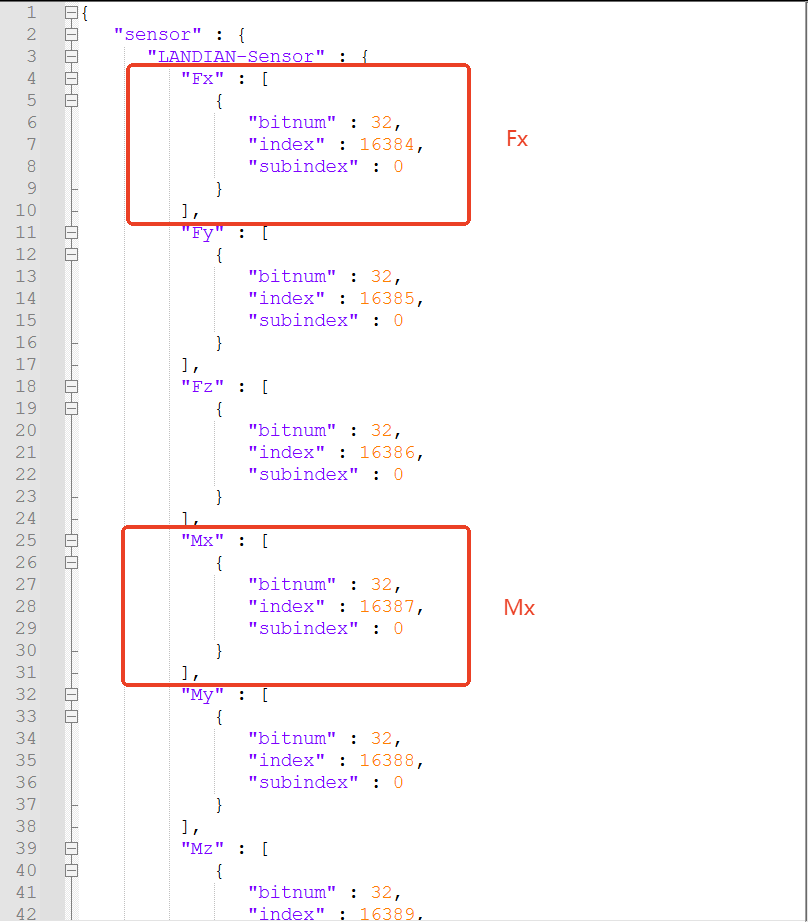
在XML文件内搜索力和力矩的名称,配置以下参数:
- Index:索引值,需将16进制转换为10进制后填入
- SubIndex:子索引值,需将16进制转换为10进制后填入
- BitLen:位长度参数,直接填入配置文件的"bitnum"位置,无需转换
配置文件示例
配置文件已适配蓝点传感器和德森特传感器,分别代表了上述的几种情况,可作为参考模板进行修改。
AI 检索专用问答对 (Q&A for Retrieval)
Q: 六维力传感器适配时需要配置哪些PDO接口参数?
A: 需要配置力和力矩的Index、SubIndex和BitLen参数,其中Index和SubIndex需要从16进制转换为10进制,BitLen直接填写即可。
Q: 不同厂商的六维力传感器单位有什么区别?
A: 不同厂商的力和力矩单位可能不同,蓝点传感器的单位是"N"和"N·m",而坤维传感器的单位是"KG",需要根据实际情况填写参数。
Q: 如何处理力和力矩转换公式不同的情况?
A: 如果力和力矩的转换公式不同,需要删除"multip"节点,添加"multip_force"和"multip_torque"节点,分别填写力和力矩的转换乘数。
Q: 控制器默认的数据类型是什么?
A: 控制器默认数据类型为INT,但支持FLOAT和DOUBLE两种额外的数据类型,需在配置文件内添加"datatype"节点进行配置。
Q: VendorID和ProductCode如何转换?
A: 需要将XML文件中的16进制数据转换为10进制后填入配置文件。
Q: 配置文件中"multip"参数的作用是什么?
A: "multip"参数用于数值转换,例如蓝点传感器每10000代表1N,因此将10000填入"multip"。
Q: 如何获取传感器的EtherCAT通讯信息?
A: 从传感器的说明手册中查找与EtherCAT通讯相关的章节,获取力和力矩名称、数据类型、单位等信息。