Appearance
多机模式与双机协作
多机模式
多机模式指可通过一个示教器控制多台机器人,本产品支持最多同时控制4个机器人。
多机模式从站连接
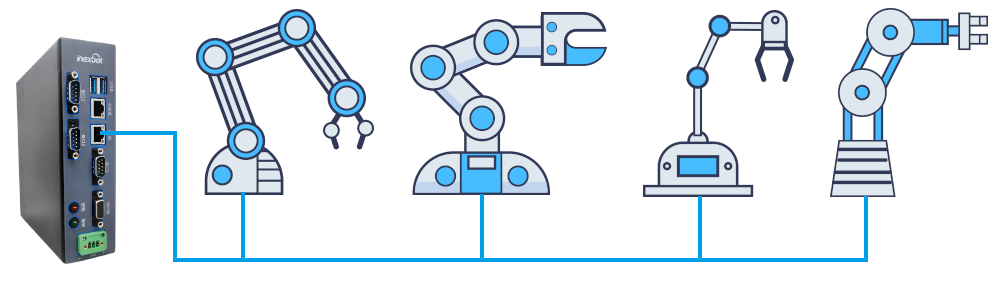

从站间串联时必须用网线直接连接,不要用交换机(交换机连接时可能会出现机器人飞车)!
多机模式机器人配置
用户权限切换为"厂家"。
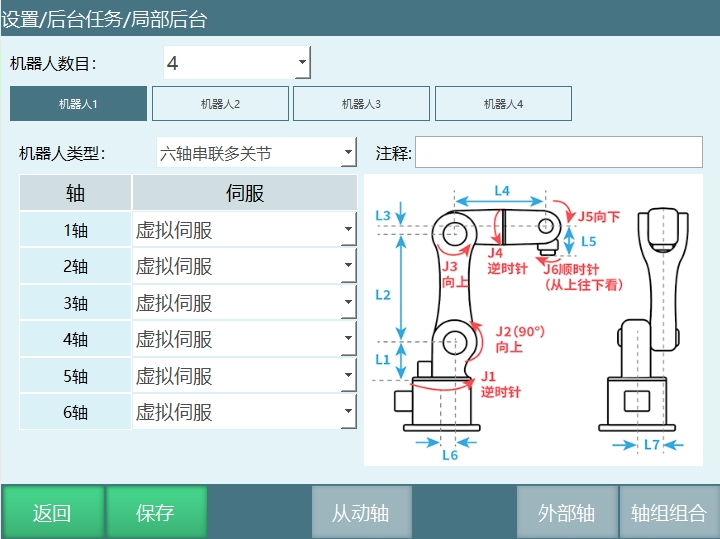
点击"设置-机器人参数-从站配置"进入配置界面,图1-1所示;点击【机器人】进入机器人配置界面,图1-2所示。

图1-1
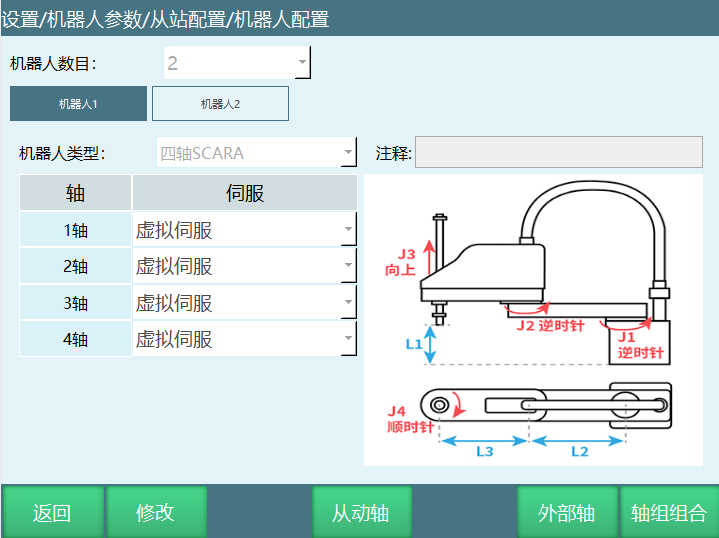
图1-2
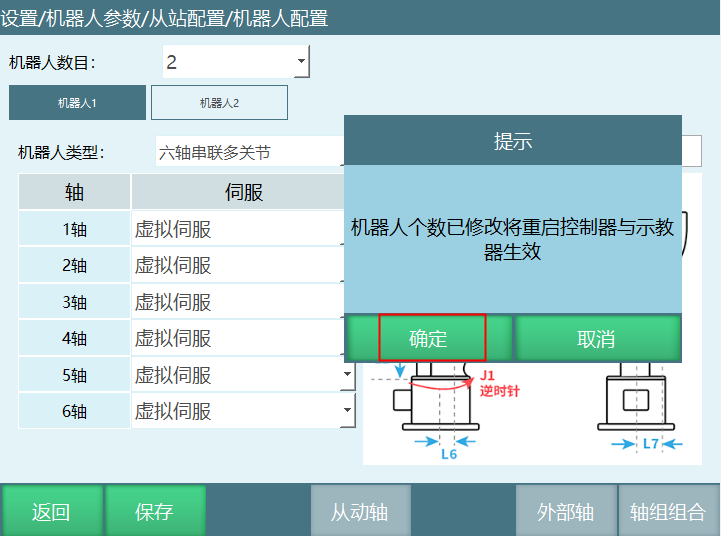
- 点击【修改】设置机器人个数,最多可以设置4个机器人,选择好数目后需要设定每一个机器人的型号和与其对应的伺服型号,点击【保存】。
- 点击提示框【确定】,重启系统。
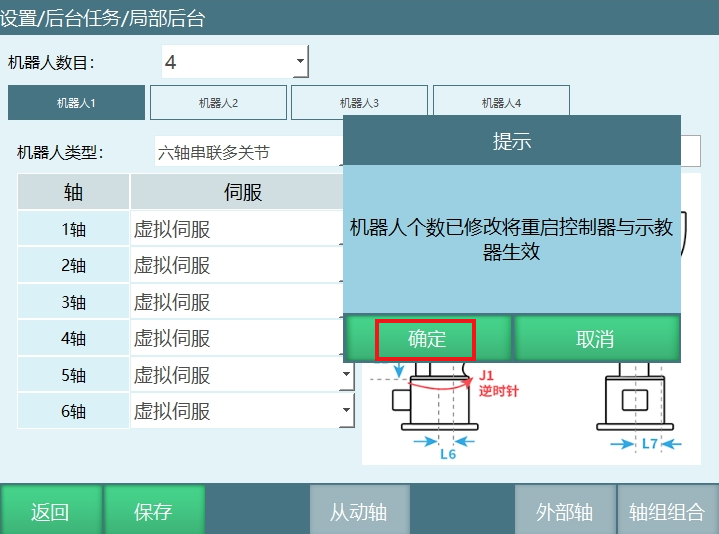
- 重启系统后机器人个数修改成功,重启后从站的顺序是由控制器与机器人串联的先后顺序决定。
多机模式导入配置
根据机器人配置界面设置的机器人类型导入配置。
例如:机器人1、机器人2为六轴串联多关节,机器人3、机器人4为四轴SCARA机器人。
导入配置步骤:
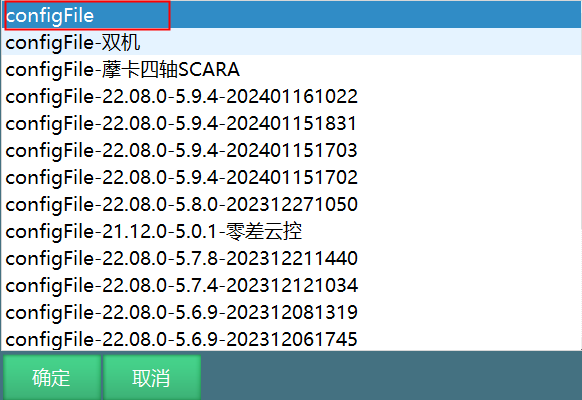
新建一个文件夹(configFile文件夹)。
机器人1对应的六轴串联多关节配置文件Robot_A.json文件复制在此文件夹;机器人2对应的六轴串联多关节配置文件Robot_A.json文件复制在此文件夹,改名为Robot_B.json;机器人3对应的SCARA机器人配置文件Robot_A.json文件复制在此文件夹,改名为Robot_C.json;机器人4对应的SCARA机器人配置文件Robot_A.json文件复制在此文件夹,改名为Robot_D.json。
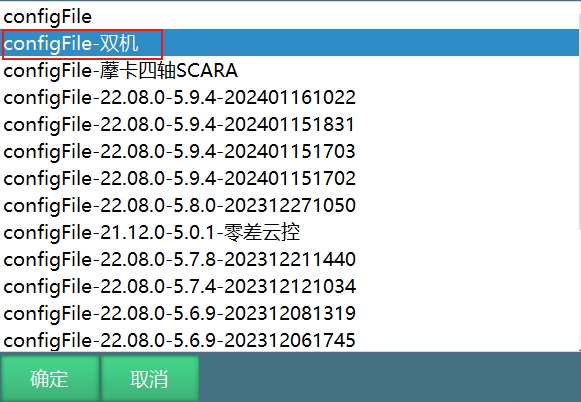
U盘插入示教器的USB口,点击设置-系统设置-导入控制器配置,选择配置文件夹,点击【确定】,操作图示如下。
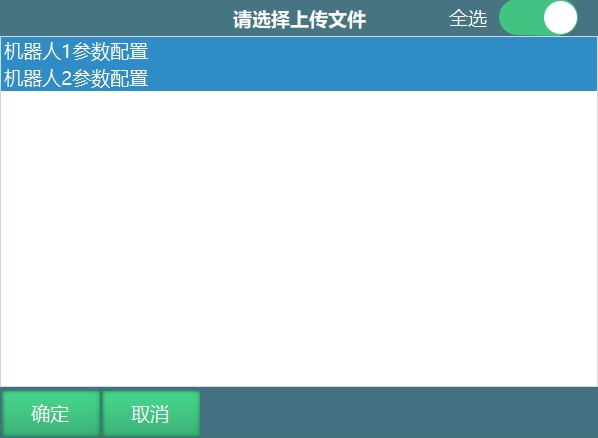
- 选中4个参数配置文件后点击【确定】,配置文件上传成功后重启控制器。
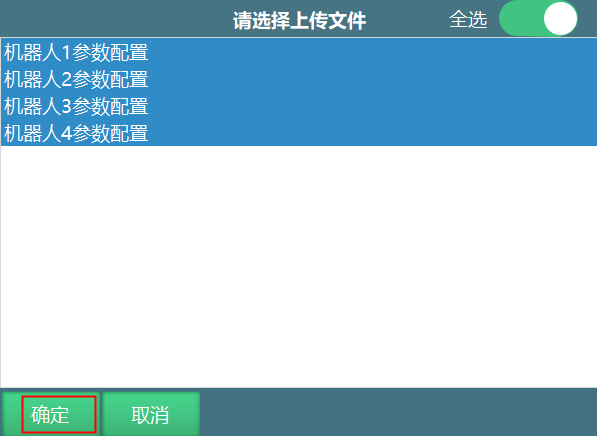
- 重启后查看机器人关节参数,DH参数是否导入成功,导入成功后就可以操作机器人。
配置文件必须是对应机器人的的配置!
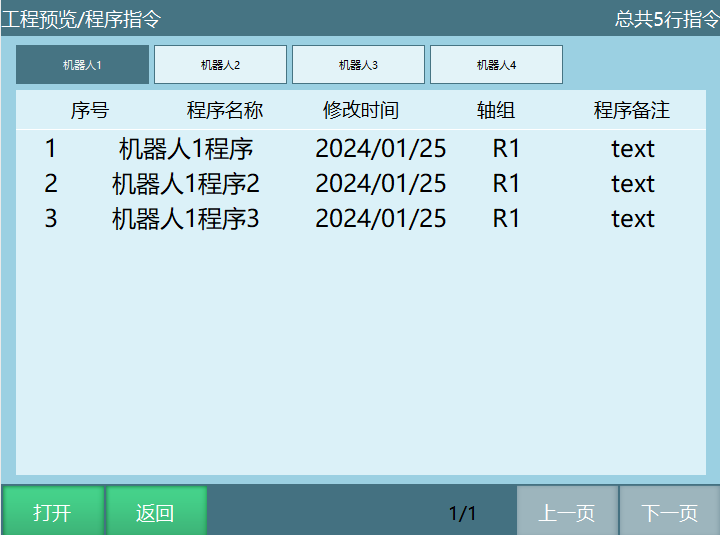
多机模式插入指令
操作步骤:
"管理员""或"厂家"权限下,点击示教器左侧"工程"。
点击【新建】,输入作业文件名称。
打开新建的作业文件,点击程序指令界面的【插入】,插入需要的指令。
机器人2,机器人3,机器人4插入指令的方式:
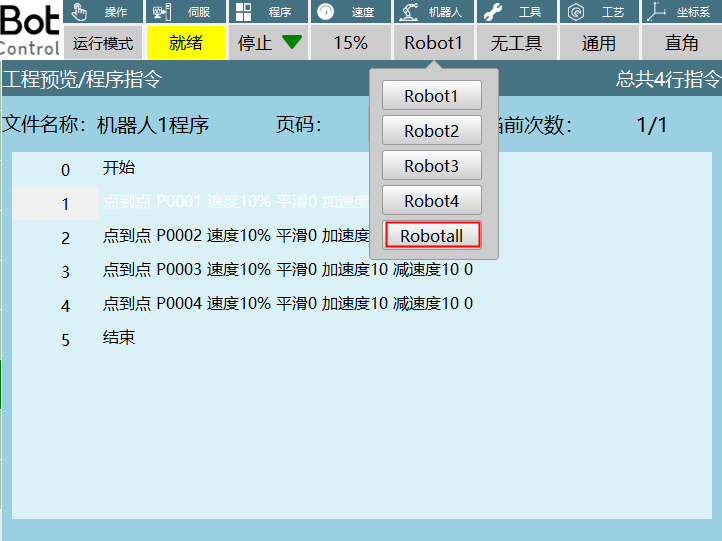
示教模式下切换机器人,可以在状态栏切换机器人也可以通过示教器上的【机器人】按键切换。
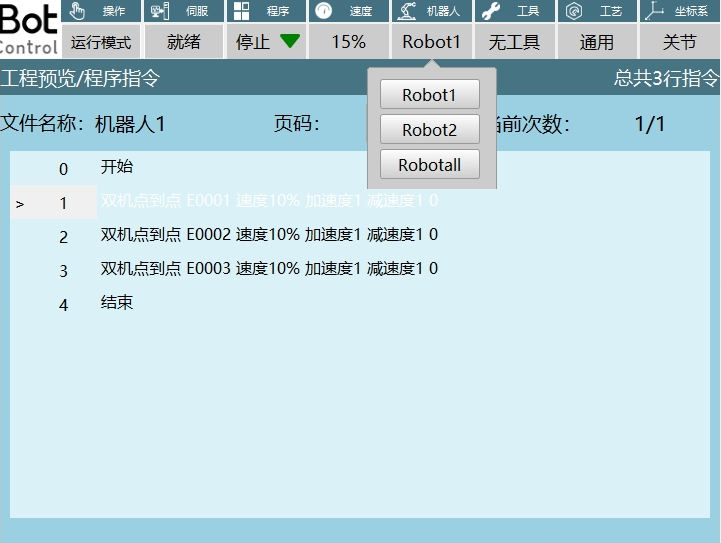
点击示教器上方的"机器人",如果需要在机器人2插入指令点击Robot2,如果需要在机器人3插入指令点击Robot3,如果需要在机器人4插入指令点击Robot4。
机器人切换成功后插入指令的步骤与上面描述步骤一致,下图是操作界面。

| 
- 当模式选择钥匙在"示教模式"处,按下【机器人】按键,可以在各机器人之间切换,分别进行示教。此时上方状态栏内的"机器人"一栏会显示当前操作机器人的序号,例如:切换机器人3上方状态栏一栏会显示"Robot3"。各个机器人之间的作业文件不通用,切换机器人的同时,作业文件也切换
多机模式运行程序
作业文件编程结束后首先在示教模式下单步运行指令,确认程序没有问题后在切换到运行模式运行程序,点击"Robotall"按钮进入多机模式机器人运行程序界面,如下图所示:

四个机器人同时启动时点击示教器上的【启动】键,四个机器人同时暂停点击示教器上的【停止】键。
开始:单独启动当前机器人的程序,启动其它机器人程序需要点击对应的机器人编号(机器人1、机器人2、机器人3、机器人4),切换到选中机器人程序界面后点击"开始"。
停止:点击"停止"当前程序暂停运行,停止其它机器人程序需要点击对应的机器人编号(机器人1、机器人2、机器人3、机器人4),切换到选中机器人程序界面后点击"停止"。
伺服停止:切换伺服状态(就绪、停止),切换其它机器人伺服状态需要点击对应的机器人编号(机器人1、机器人2、机器人3、机器人4),切换到选中机器人程序界面后点击"伺服停止"。
清除错误:程序在运行中出现错误时点击"清除错误",清除报错,程序可以继续运行,清除其它机器人错误需要点击对应的机器人编号(机器人1、机器人2、机器人3、机器人4),切换到选中机器人程序界面后点击"清除错误"。
选择程序:选择当前机器人不同的程序,其它机器人选择对应程序需要点击对应的机器人编号(机器人1、机器人2、机器人3、机器人4),切换到选中机器人程序界面后点击"选择程序"。
设置次数:设置当前程序的运行次数,运行完指定次数后程序停止运行,设置其它机器人程序运行次数需要点击对应的机器人编号(机器人1、机器人2、机器人3、机器人4),切换到选中机器人程序界面后点击"设置次数"。
单次运行:当前程序只运行一次,设置其它机器人程序需要点击对应的机器人编号(机器人1、机器人2、机器人3、机器人4),切换到选中机器人程序界面后点击"单次运行"。
循环运行:当前程序无限循环运行,设置其它机器人程序需要点击对应的机器人编号(机器人1、机器人2、机器人3、机器人4),切换到选中机器人程序界面后点击"循环运行"。
局部变量:点击"局部变量"可以查看当前程序的位置变量和数值变量,查看其它机器人局部变量需要点击对应的机器人编号(机器人1、机器人2、机器人3、机器人4),切换到选中机器人程序界面后点击"局部变量"。
双机协作
双机协作必须是两台六轴串联多关节机器人。
双机模式从站连接
控制器伺服网口 机器人1伺服IN口
机器人1伺服OUT口 机器人2的伺服IN口
机器人2的伺服OUT口可以串联其它从站
从站间串联时必须用网线直接连接,不要用交换机(交换机连接时可能会出现机器人飞车)!
双机模式机器人配置
用户权限切换为"厂家"。
点击"设置-机器人参数-从站配置"进入配置界面,图2-1所示,点击【机器人】进入机器人配置界面,图2-2所示。
图2-1
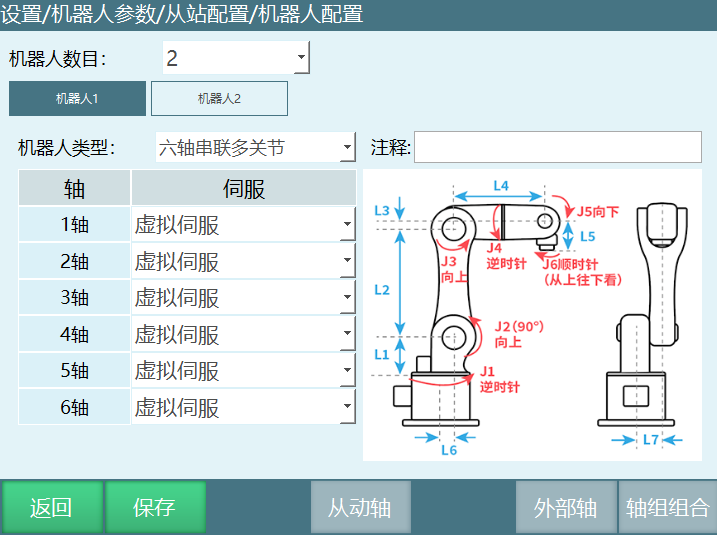 图2-2
图2-2
- 点击【修改】设置2个机器人,机器人类型选择六轴串联多关节,设置每个轴对应的伺服型号,点击【保存】,再点击提示框【确定】,重启系统。
重启系统后机器人个数修改成功。
点击设置-机器人参数-运动参数,打开是否启用双机同步模式开关,打开开关双机模式设置成功。
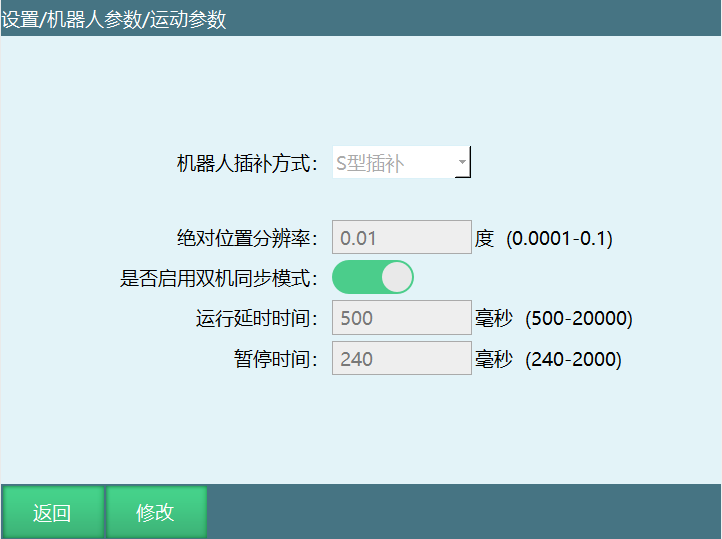
注释:
关闭双机协作按钮,需要重启控制器系统;打开不需要重启。
机器人个数大于2,重启时将自动关闭双机协作功能。
双机模式不可与多机模式同时使用。
双机模式和外部轴不可以同时使用。
双机模式导入配置
导入配置步骤:
新建一个文件夹(configFile文件夹)。
机器人1对应的六轴串联多关节配置文件Robot_A.json文件复制在此文件夹;机器人2对应的六轴串联多关节配置文件Robot_A.json文件复制在此文件夹,改名为Robot_B.json。
U盘插入示教器的USB口,点击设置-系统设置-导入控制器配置,选择配置文件夹,点击【确定】。
- 选中2个参数配置文件后点击【确定】,配置文件上传成功后重启控制器。
- 重启后查看机器人关节参数,DH参数是否导入成功,导入成功后就可以操作机器人。
双机模式插入指令
双机工作模式:机器人双机协作是由两台六轴串联机器人协同完成,在整个工作过程中,机器人之间互相协调,以完成最终的任务目标。
双机指令的介绍请参考指令手册章节:运动控制类。
问题:双机指令插入后如何示教点位?
解答:
机器人1指令界面插入双机指令;
点动机器人1到达目标点位;
切换到机器人2,点动机器人2到达目标点位;
在机器人1程序指令界面选中需要修改的指令点击【修改】,然后在参数定界面点击【当前位置设置为E点】,提示框弹出"是否继续修改点位",点击【确定】将当前位置存入目标变量,点击【取消】不会记录机器人当前点位到目标变量,可以继续移动机器人到想要的点位。
注:双机点到点,双机直线,双机圆弧和双机整圆指令只支持在机器人1插入。
下图第1部分表示机器人1当前位置和存入变量的位置,第2部分表示机器人2当前位置和存入变量的位置。

双机模式运行程序
作业文件编程结束后,首先在示教模式下单步运行指令,确认程序没有问题后切换到运行模式运行程序,点击"Robotall"进入多机模式机器人运行程序界面。如下图所示:
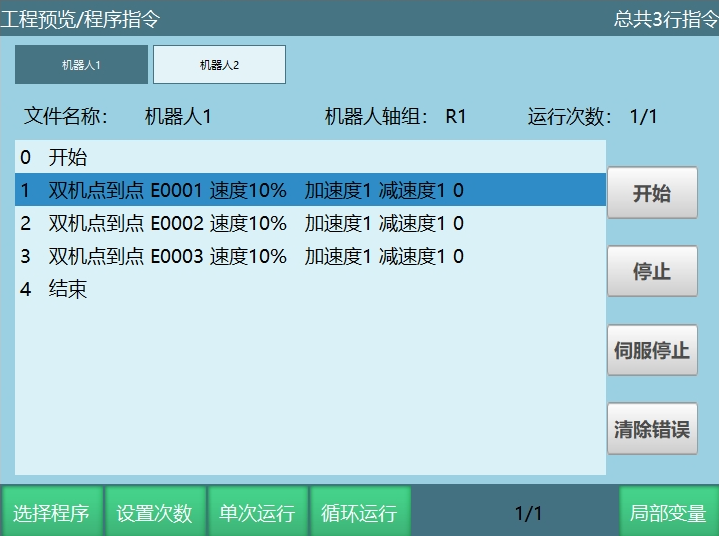
同时启动两个机器人,可以点击示教器上面的【启动】。
同时暂停两台机器的工作点击示教器上面的【停止】。
如果单独启动机器人1可以点击【机器人1】,然后点击图上所示的【开始】,机器人1开始工作,点击【停止】机器人1暂停工作。
单独启动机器人2首先点击【机器人2】,然后点击【开始】,机器人2开始工作,点击【停止】机器人2暂停工作。
其它参数的描述可参考多机模式运行程序。
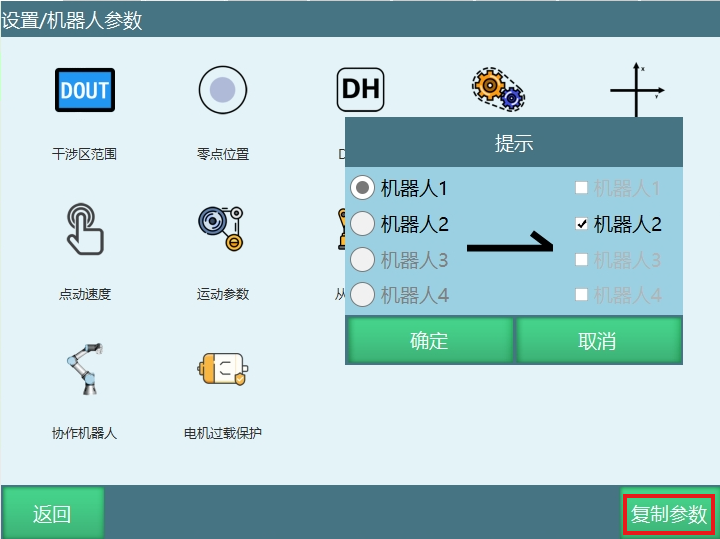
复制参数
功能:将当前机器人的参数复制给其他机器人,点击复制参数选择源机器人和目标机器人,点击提示框里【确定】复制参数成功。
注意事项:
复制参数不包括:机器人零点位置、从站配置、NP参数、伺服参数、协作机器人参数。
机器人数目大于1时才可以使用复制参数功能。
复制参数不能选择当前机器人,例如机器人1的参数只能选择机器人2、机器人3、机器人4复制。
AI 检索专用问答对 (Q&A for Retrieval)
Q: 多机作业文件可以互相通用吗?
A: :不通用,切换机器人时作业文件会同步切换
Q: 如何同时启动多台机器人?
A: 切换到 Robotall 界面,按示教器上的【启动】键。
Q3: 双机模式可以同时使用外部轴吗?
A: 不可以,双机模式与外部轴不能同时使用。
Q4: 双机模式可以同时使用外部轴吗?
A: 不可以,双机模式与外部轴不能同时使用。