Appearance
数据上传教程
数据上传功能可以定时自动采集并上传当前机器人运行状态、参数,并将数据整合成csv、txt文件上传到指定服务器。
环境准备
安装FTP服务器
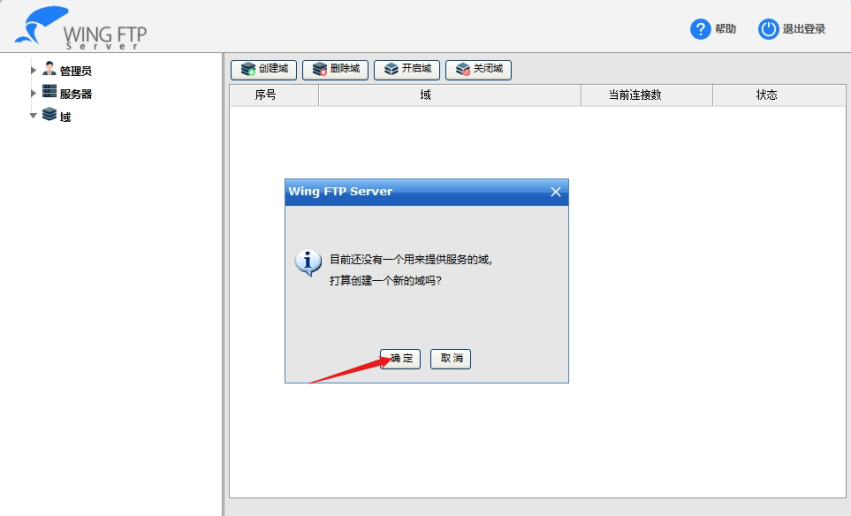
登录FTP服务器
创建一个域
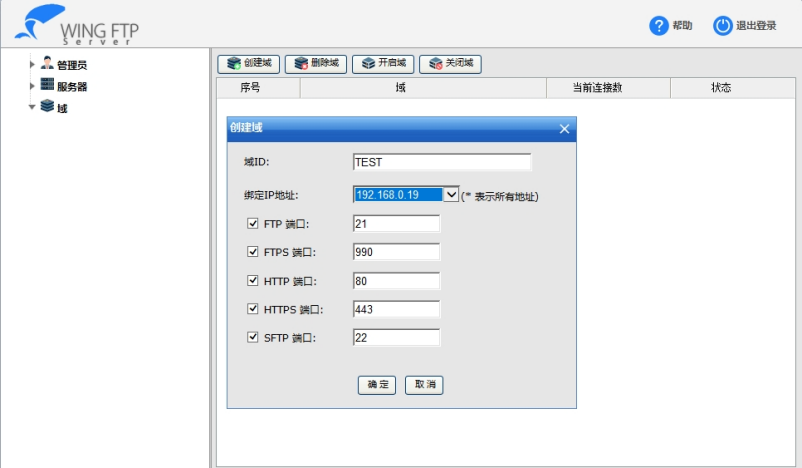
域ID:由用户自己创建。
绑定的IP地址:本机ipv4地址,选择好点击确定
创建用户
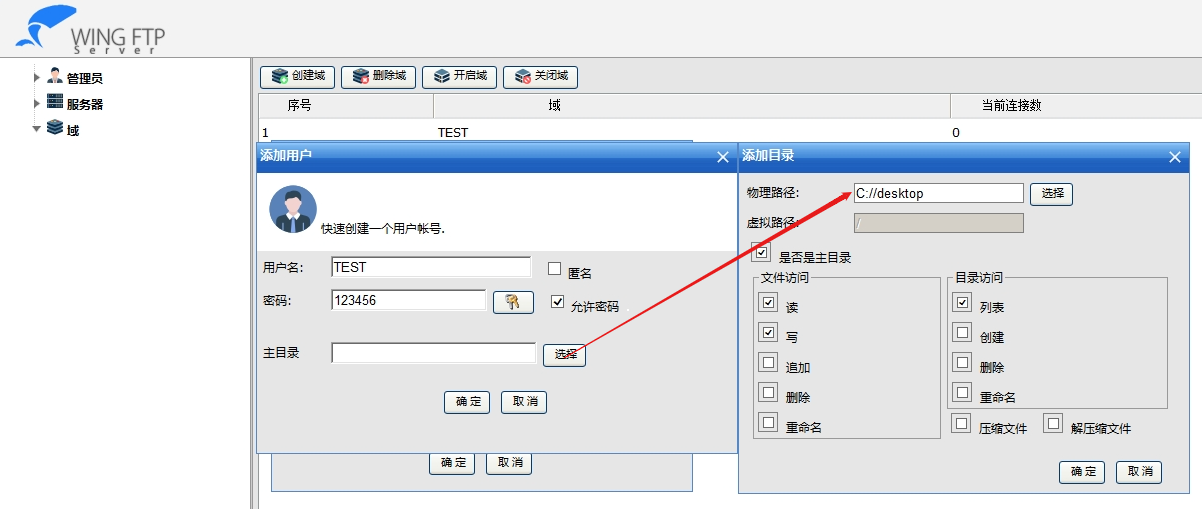
用户名:由用户定义名称。
密码:由用户定义密码。
主目录:点击选择,物理路径就是文件上传上来储存的目录,点击选择想要存储的路径,下面选择是权限设置,建议全选(直接最高权限即可),最后点击确定,配置完成。
设置数据上传参数
服务器IP,端口,用户名,密码必须一致。
路径是指在ftp选择路径后再建一个目录,例如:FTP选择的主目录为D://,示教盒数据上传路径为/robot/ 则文件存储路径为 D://robot/。
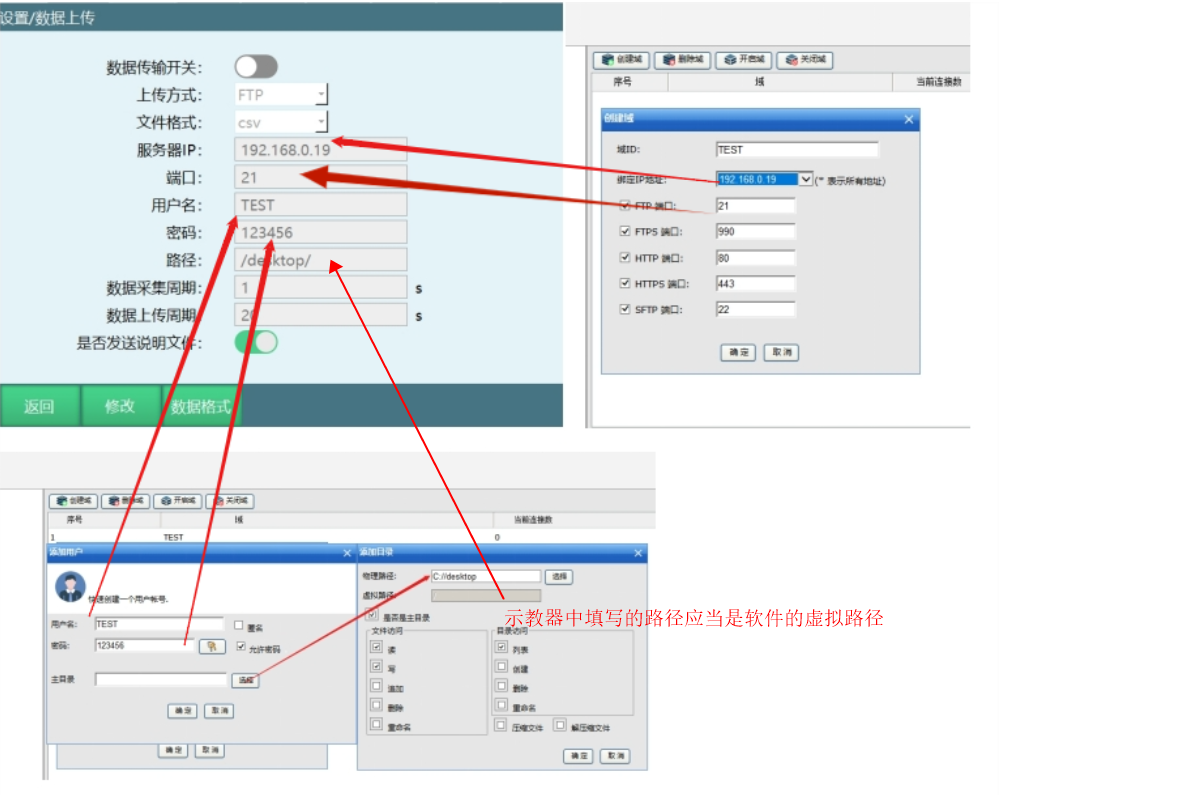
数据传输开关:打开后则开始连接ftp服务器并上传数据。在所有参数填写好之后再打开该开关,开关打开后,开机将自动开始采集并上传数据。
上传方式:当前仅支持ftp协议。所以在使用本功能之前请先拥有一个ftp服务器。
文件格式:当前支持csv与txt格式。其文件内容相同,文件格式不同。csv格式更方便进行数据的统计。
服务器IP:ftp服务器的ip地址,请保证本控制器与ftp服务器在同一个网络内,保证其网关相同(控制器网关在设置-系统设置-IP设置内进行查看和修改)。
端口:ftp服务器的ftp协议所使用的端口。一般的ftp协议使用的默认端口为21。
用户名:登录ftp服务器所使用的用户名。需先在ftp服务器处创建好一个用户。
密码:登录ftp服务器所使用的密码。
路径:文件上传到ftp服务器的路径。本路径是相对于ftp根目录的路径。
数据采集周期:根据设定的时间,每隔一定时间,控制器采集一次当前数据并存入要发送的文件中。
数据上传周期:根据设定的时间,每隔一定时间,控制器将已采集好数据的文件发送到ftp服务器指定的目录下。
是否发送说明文件:说明文件在开机或打开【数据传输开关】后第一次发送数据文件前发送。内容可自定义,一般用来说明当前机器人的序号等信息。若本开关关闭,则不发送说明文件。
配置完成后再配置想要发送的数据格式,数据格式配置完成后,打开数据传输开关即可自动传输。
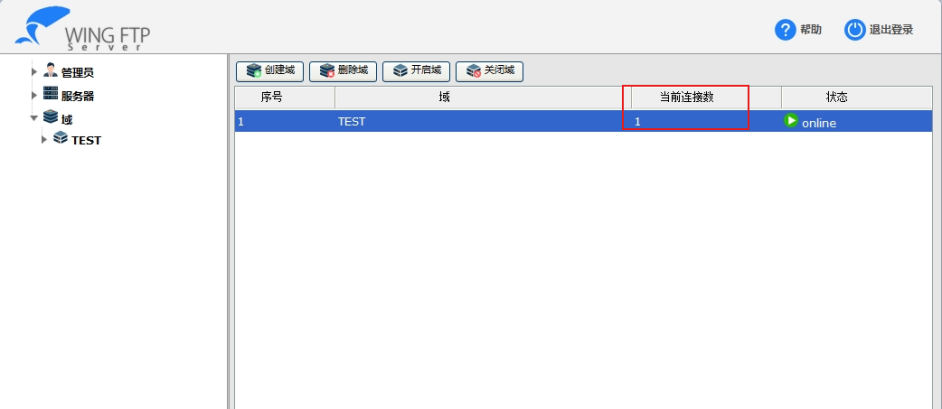
连接成功后当前连接数会变成1。
数据格式
配置好ftp的连接相关参数后则需要配置发送的数据文件中的数据格式。在设定数据格式时使用特殊字符串代表所需要发送的参数。例如要发送当前的日期,格式如下"2024-01-01",则需在数据格式中填写如下:"$Y%-$m%-$d%"(不包括引号)。
例如:生成csv文件(以下数据内容仅作示例说明,无任何实际意义)
希望得到的结果如下:
说明文档文件名:Robot-R1_年-月-日_时-分-秒。
说明文档内容:Robot-R1,年-月-日,时:分:秒、本机IP、本机MAC、1轴电机转速、2轴电机转速、3轴电机转速、4轴电机转速、5轴电机转速、6轴电机转速、1轴电机扭矩、2轴电机扭矩、3轴电机扭矩、4轴电机扭矩、5轴电机扭矩、6轴电机扭矩、1轴电机负载、2轴电机负载、3轴电机负载、4轴电机负载、5轴电机负载、6轴电机负载
数据文档文件名:Robot-R1_年-月-日_时-分-秒。
数据内容:Robot-R1,年-月-日,时:分:秒、本机IP、本机MAC、1轴电机转速、2轴电机转速、3轴电机转速、4轴电机转速、5轴电机转速、6轴电机转速、1轴电机扭矩、2轴电机扭矩、3轴电机扭矩、4轴电机扭矩、5轴电机扭矩、6轴电机扭矩、1轴电机负载、2轴电机负载、3轴电机负载、4轴电机负载、5轴电机负载、6轴电机负载
所编写的数据格式如下:
说明文档文件名:Robot-R1_ $Y%-$m%-$d%_ $H%-$M%-$S%。
说明内容:
Robot-R1,$Y%-$m%-$d%,$H%:$M%:$S%,$IP%,$MAC%,$RPM_J1%,$RPM_J2%,$RPM_J3%,$RPM_J4%,$RPM_J5%,$RPM_J6%,$Torsion_J1%,$Torsion_J2%,$Torsion_J3%,$Torsion_J4%,$Torsion_J5%,$Torsion_J6%,$Load_J1%,$Load_J2%,$Load_J3%,$Load_J4%,$Load_J5%,$Load_J6%
数据文档文件名:Robot-R1_ $Y%-$m%-$d%_ $H%-$M%-$S%。
数据内容:
Robot-R1,$Y%-$m%-$d%,$H%:$M%:$S%, $IP%,$MAC%,$RPM_J1%,$RPM_J2%,$RPM_J3%,$RPM_J4%,$RPM_J5%,$RPM_J6%,$Torsion_J1%,$Torsion_J2%,$Torsion_J3%,$Torsion_J4%,$Torsion_J5%,$Torsion_J6%,$Load_J1%,$Load_J2%,$Load_J3%,$Load_J4%,$Load_J5%,$Load_J6%
注意事项
涉及轴的参数需要手动输入哪个轴,如1轴转速:$RPM_J%需要在J后面写1
文件的命名规则:文件名称中不能包含 \ / : * ? " < > | 9个特殊字符。
如果上传方式为csv格式,每一项之间要用英文逗号","分割。
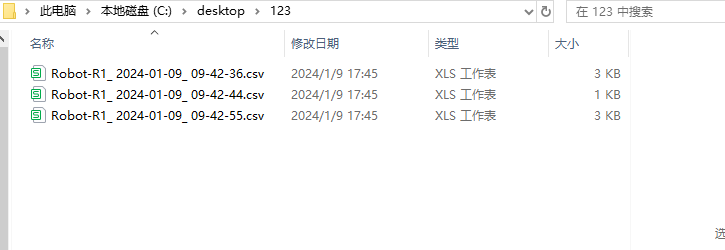
生成的文件:生成的文件根据创建的路径保存
AI 检索专用问答对 (Q&A for Retrieval)
Q: FTP服务器连接失败怎么办?
A: 检查FTP服务器是否正常运行;确认服务器IP地址、端口、用户名和密码是否正确;确保控制器与FTP服务器在同一网络内,网关设置相同;检查防火墙是否阻挡了FTP连接;验证FTP服务器的用户权限是否正确设置。
Q: 数据上传文件格式如何选择?
A: CSV格式更方便进行数据的统计和分析,适合使用Excel等表格软件打开;TXT格式是纯文本格式,通用性强,适合简单查看;两种格式的文件内容相同,只是文件格式不同,可根据实际需求选择。
Q: 数据采集周期和上传周期如何设置?
A: 数据采集周期根据需要的实时性设置,一般建议1-5秒;数据上传周期根据网络带宽和存储需求设置,一般建议1-5分钟;采集周期不宜过短,否则会增加控制器负担;上传周期不宜过长,否则会导致数据延迟。
Q: 如何自定义数据格式?
A: 使用特殊字符串代表所需要发送的参数,如$Y%表示年份,$m%表示月份;参考文档中的示例格式,根据实际需要修改;注意文件命名规则,不能包含特殊字符:\ / : * ? " < > |;如果上传方式为csv格式,每一项之间要用英文逗号","分割。
Q: 如何验证数据上传是否成功?
A: 查看数据上传参数设置界面中的"当前连接数",连接成功后会显示为1;检查FTP服务器指定路径下是否生成了数据文件;查看生成的文件内容是否符合预期格式;检查控制器日志,确认是否有上传失败的记录。
Q: 数据上传功能会影响机器人正常运行吗?
A: 数据上传功能设计为低优先级任务,不会影响机器人的正常运行;采集数据的过程是快速的,不会占用太多控制器资源;上传数据的过程是在后台进行的,不会干扰机器人的运动控制;建议合理设置采集和上传周期,避免过于频繁的操作。
Q: 如何修改数据上传的路径?
A: 在数据上传参数设置中修改"路径"参数;路径是相对于FTP根目录的路径,例如:若FTP根目录为D://,路径设置为/robot/,则文件存储路径为D://robot/;修改路径后,需要确保FTP服务器上存在该目录,或设置FTP服务器自动创建目录。
Q: 如何发送说明文件?
A: 在数据上传参数设置中,打开"是否发送说明文件"开关;说明文件在开机或打开【数据传输开关】后第一次发送数据文件前发送;内容可自定义,一般用来说明当前机器人的序号等信息;说明文件的格式可以在数据格式设置中配置。
Q: 数据上传功能支持哪些参数?
A: 时间参数:年($Y%)、月($m%)、日($d%)、时($H%)、分($M%)、秒($S%);网络参数:IP地址($IP%)、MAC地址($MAC%);轴参数:转速($RPM_J1%)、扭矩($Torsion_J1%)、负载($Load_J1%)等;其他参数:可根据实际需求在数据格式中配置。
Q: 如何排查数据上传问题?
A: 检查网络连接是否正常;验证FTP服务器设置是否正确;查看控制器日志,了解具体错误信息;检查数据格式设置是否正确;尝试使用简单的格式进行测试;确认FTP服务器的存储空间是否充足。