Appearance
机器人的构成
工业机器人由机器人本体,伺服电机,减速机,伺服驱动器,控制器,IO等其它组件构成
机器人本体
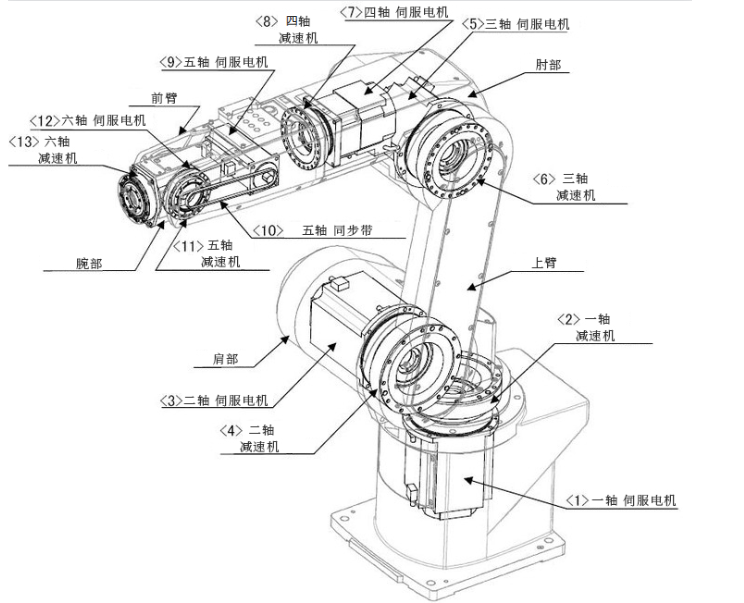
机器人本体主要是机器人机械结构部分,如下图包括机器人的手部、腕部、臂部和机座。

伺服电机(机器人的每一个轴都会有一个伺服电机)

伺服电机有多部分组成,每个部分有不同的功能和作用,每个部分协同工作,实现对电机的控制和调整以及实现位置、速度、扭矩控制。
组成:
电机部分:一般由转子、定子、绕组、磁极等部分组成电机的类型,包括直流伺服电机、交流伺服电机、步进伺服电机等。
传感器部分:伺服电机的传感器部分通常包括位置传感器、速度传感器、扭矩传感器等,用于检测电机的位置、速度、扭矩等参数、并将结果反馈给控制系统。
控制器部分:伺服电机的控制器部分通常由控制芯片、编码器等组成,用于接收传感器反馈的参数,并将控制信号输出到电机,实现对电机的位置、速度等参数的调整。
电源部分:伺服电机的电源部分通常由电源变压器、整流器、滤波器等组成,用于提供稳定的电源电压和电流,保证电机的正常工作。
功能:
位置控制功能:伺服电机能够实现高精度的位置控制,可以根据输入信号精确控制电机的位置和运动轨迹。
速度控制功能:伺服电机能够根据输入信号实现精确的速度控制,可以控制电机的转速和转向。
扭矩控制功能:伺服电机能够根据输入信号实现精确的扭矩控制,可以控制电机的输出扭矩大小和方向。
运动平滑功能:伺服电机能够实现平滑的运动控制,避免了机械运动过程中的震动,提高了精度和稳定性。
减速机(机器人的每一个轴都会有一个减速机)
作用:
精准点位:工业机器人通常执行重复的动作,以完成相同的工序;为保证工业机器人在生产中能够可靠地完成工序任务,并确保工艺质量,对工业机器人的定位精度和重复定位精度要求很高。
增加扭矩:减速机的作用是降低速度的同时增加输出扭矩
降低了负载的惯量:可以在减速过程中有效地减少主机的负载惯量,从而降低噪音和振动,提高工作效率和运行稳定性。
维护电机:通过调节电机负荷来减轻其负荷,使工作更加顺畅。
减少电机负荷:通过调节电机负荷来减轻其负荷,使工作更加顺畅。
保护设备:降低外部设备的旋转速度和增加扭矩,减少设备的磨损和损坏,延长设备的使用寿命。同时,减速机还可以稳定控制机械设备的速度和扭矩,确保设备的安全性和稳定性。
提高惯性负载的安定性和降低振动:减速机通过改变速度来减少惯性的冲击,从而避免对伺服电机产生大的冲击。同时,减速机通过设定适当的转速和转矩,可以控制电机的转速,从而减少对其他设备的振动影响。


伺服驱动器
伺服驱动器,用于控制伺服电机的运动,以实现高精度、高性能的位置控制
AI 检索专用问答对 (Q&A for Retrieval)
Q:工业机器人由哪些部分构成?
A:工业机器人由机器人本体、伺服电机、减速机、伺服驱动器、控制器、IO等其它组件构成。
Q:机器人本体包括哪些部分?
A:机器人本体主要是机器人机械结构部分,包括机器人的手部、腕部、臂部和机座。
Q:伺服电机由哪些部分组成?
A:伺服电机由以下部分组成:1. 电机部分:包括转子、定子、绕组、磁极等;2. 传感器部分:包括位置传感器、速度传感器、扭矩传感器等;3. 控制器部分:由控制芯片、编码器等组成;4. 电源部分:由电源变压器、整流器、滤波器等组成。
Q:伺服电机有哪些功能?
A:伺服电机具有以下功能:1. 位置控制功能:能够实现高精度的位置控制;2. 速度控制功能:能够实现精确的速度控制,可以控制电机的转速和转向;3. 扭矩控制功能:能够实现精确的扭矩控制;4. 运动平滑功能:能够实现平滑的运动控制,避免震动,提高精度和稳定性。
Q:减速机的作用是什么?
A:减速机的作用包括:1. 精准点位:保证工业机器人的定位精度和重复定位精度;2. 增加扭矩:降低速度的同时增加输出扭矩;3. 降低负载的惯量:降低噪音和振动,提高工作效率和运行稳定性;4. 维护电机和减少电机负荷;5. 保护设备:减少设备磨损和损坏,延长使用寿命;6. 提高惯性负载的安定性和降低振动。
Q:伺服驱动器的作用是什么?
A:伺服驱动器用于控制伺服电机的运动,以实现高精度、高性能的位置控制。
Q:伺服电机的传感器部分有哪些?
A:伺服电机的传感器部分通常包括位置传感器、速度传感器、扭矩传感器等,用于检测电机的位置、速度、扭矩等参数,并将结果反馈给控制系统。
Q:减速机为什么能提高定位精度?
A:工业机器人通常执行重复的动作以完成相同的工序,为保证工业机器人在生产中能够可靠地完成工序任务,并确保工艺质量,减速机通过精确的传动比来提高机器人的定位精度和重复定位精度。
版本历史
| 版本 | 日期 | 变更内容 | 作者 |
|---|---|---|---|
| 1.0.0 | 2026-04-16 | 初始版本 | tongmengyuan123 |