Appearance
轴控制使用功能指南
| 指令类型 | 前台 | 全局后台 | 局部后台 |
|---|---|---|---|
| 轴点到点 | 支持 | 支持 | 支持 |
| 轴恒转速 | 支持 | 支持 | 支持 |
| 轴恒转矩 | 支持 | 支持 | 支持 |
| 轴停止 | 支持 | 支持 | 支持 |
| 取消独立控制 | 支持 | 支持 | 支持 |
注意事项:
在使用轴控制功能前,请务必注意以下几点:
使用前请检查伺服是否支持PP、CSP、PV、CSV、PT等模式。部分伺服手册虽然标明支持这些模式,但实际可能不支持。例如清能德创大部分伺服、久同驱控一体产品。
如果现场使用的伺服这些模式的控制字是非常规的,需要重新适配,请详情查看对应伺服手册。
部分伺服的控制字真唱,但是使用的单位不一致时,需要重新适配,请详情查看对应伺服手册。
根据不同伺服的PP、CSP、PV、CSV、PT等模式说明配置eni参数,请详情查看对应伺服手册。
以上配置注意事项确认后,仍无法正常运动,请确认伺服参数是否正确。
轴控制运动无法试运行。
注意事项:
主程序中连续调用全局、局部程序时,中间需要添加延时。多线程开启时,不添加延迟存在没有开启这个线程中的轴运动,导致无法运行(外部轴在取消独立控制后首次运行的现象)。
主程序调用局部程序,局部程序中在没有设置轴停止指令时,无法随着局部程序的结束而停止,建议按照正常轴指令使用流程使用。
弹窗页面中的运动、标定页面中的点动与回零,一些保持运行的不会被对应的轴停止而停止,只有通过对应界面的停止方式而停止。
独立轴参数
独立轴参数设置
打开设置——独立轴参数页面,设置独立轴关节参数:
点击"+"按钮新建独立轴页面,配置关节参数(最多可以新建10个独立轴)。
点击"修改"按钮可以修改独立轴关节参数。
点击"删除轴"删除选中的当前独立轴。
修改电机方向,可以改变独立轴运动方向。
根据实际使用情况选择地轨,需要填写角度距离转换比,并且指令中位置单位从 ° 改为 mm。

零点标定/点动
打开设置——独立轴参数——零点标定/点动:
当前位置: 显示独立轴的当前位置,根据实际状态显示单位,如果独立轴参数中选择地轨,当前位置的单位从 ° 改为 mm
回零点: 点击回零点,可以将当前独立轴运动到零点位置,需要配置pdo后正常使用
回零停止: 点击回零停止,可以将正在运动的当前轴停止,需要配置pdo后正常使用
设置零点: 点击设置零点可以将独立轴当前位置设置为零点位置
点动速度: 输入点动时使用的速度,范围[0.001,10000]
加减速度: 输入点动时使用的加减速倍数,范围[1,5]
长按正转: 点击长按正转后,当前独立轴的映射轴正方向运动
长按反转: 点击长按反转后,当前独立轴的映射轴反方向运动
修改: 点击修改后,可以正常填写点动速度、加减速度,这两个参数不保存,重启后需要重新设置
回零点: 使用CSP模式,CSP:607A
点动调试: 使用CSV模式,CSV:60FF

多圈值
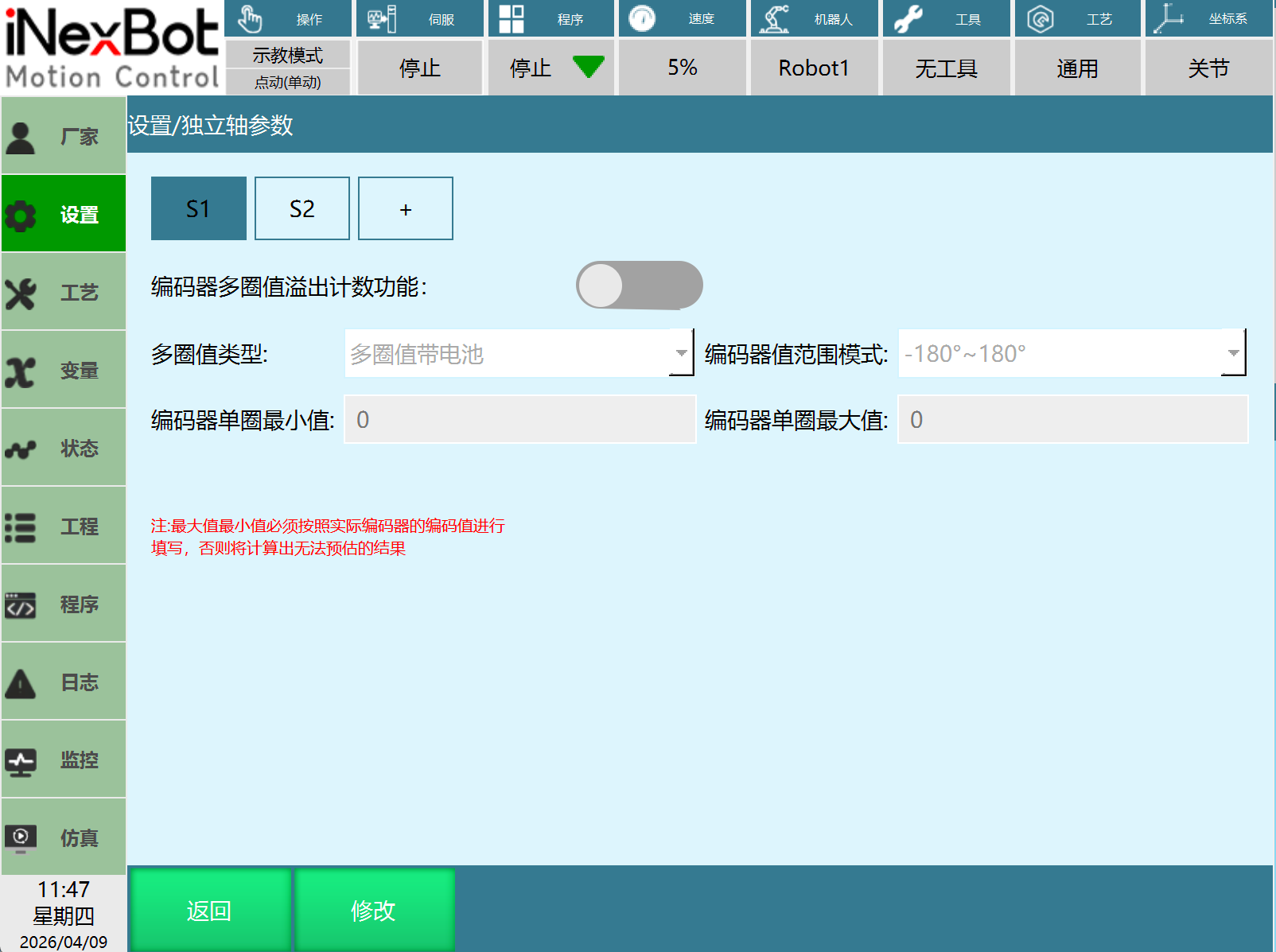
打开设置——独立轴参数——多圈值:
功能介绍: 编码器多圈值溢出计数功能:该功能用来消除编码器最大/最小值之间跳变产生的影响。
例如:编码器多圈值范围为[-2147483648,2147483647],当前编码器多圈值位置为2147483647,则再往正方向转1个单位则为-2147483648,如系统不知道编码器多圈值范围则会认为机器人突然跳变,并不会知道实际只转了1个单位,此时则容易出现飞车现象。
 必须填写该参数,不填写可能出现以下问题: 必须填写该参数,不填写可能出现以下问题:1. 点位出现较大跳变,例如突然从4度变为40度。 2. 飞车。 |
|---|
编码器多圈值溢出计数功能: 开启后可以消除编码器从最大运动到最小之间跳变产生的影响
多圈值类型: 选择编码器类型,需要确认选择时候正常
- 多圈值带电池
- 多圈值不带电池
- 单圈值
编码器值范围模式: 选择编码器范围类型,需要确认选择时候正常
- -180°~180°
- 0°~360°
编码器单圈值最小值: 根据多圈值类型、编码器值范围模式显示对应的编码器单圈的最小值
编码器单圈值最大值: 根据多圈值类型、编码器值范围模式显示对应的编码器单圈的最大值
轴控制指令详解
轴点到点 (AXIS_PTP)
支持类型: 外部轴(O1、O2)、独立轴(S1、S2)
运动类型: PP、CSP
轮廓位置模式(PP): 控制器将目标位置、速度、加减速度发送给驱动器,驱动器内部完成位置控制、速度控制、转矩控制。
周期同步位置模式(CSP): 控制器完成位置规划,将规划好的目标位置,周期性地发送给驱动器,驱动器内部完成位置控制、速度控制、转矩控制。
位置类型: 绝对位置、增量
- 绝对位置:运行到设置的位置处
- 增量:在当前位置以一定增量移动
位置: 位置设置的是距离或者角度,正负代表运动方向,根据轴的类型来决定,mm或者°。
速度: 速度、加减速度设置该轴的移动速度,填入数值的范围是1-100%关节参数里面设定(速度、加减速)的值;加减速度默认不使用,可以选择手填,可以选择整数型和浮点型等8种数字类型。
阻塞特性: 该指令为阻塞运动,运动完成后才会运行下面的指令。
对应模式需要的PDO(以安驰为例):
- PP:6081 6083 6084
- CSP:607A

使用案例:
NOP
AXIS_PTP AxisNum = 1 RunType = 1 PositionType = 1 PositionValue = 1000 V = 30 AccSpeed = [-] DecSpeed = [-]
AXIS_STOP 1
AXIS_PTP AxisNum = 1 RunType = 1 PositionType = 1 PositionValue = -1200 V = 30 AccSpeed = 50 DecSpeed = 30
AXIS_STOP 1
END轴恒转速 (CONSTANTAXIS_VELOCITY)
支持类型: 外部轴(O1、O2)、独立轴(S1、S2)
运动类型: PV、CSV
轮廓速度模式(PV): 控制器将目标速度、加减速度发送给驱动器,速度、转矩调节由驱动器内部进行。
周期同步速度模式(CSV): 控制器完成目标速度规划周期性发送给驱动器,速度、转矩调节由驱动器内部进行。
转速: 转速为该轴以设定的速度(电机转速)进行移动,正负代表运动方向,单位为rpm或mm/min。
加减速度: 加减速根据转速来计算,单位是转速×倍/min²;数值类型默认是不使用,选择手填时,可以选择整数型和浮点型等8种数字类型。
阻塞特性: 该指令为不阻塞运动,运动过程中可以执行下一条指令,直到下个指令运行。
对应模式需要的PDO(以安驰为例):
- PV:60FF 6083 6084
- CSV:60FF

使用案例:
NOP
CONSTANTAXIS_VELOCITY AxisNum = 1 RunType = 2 V = -2900 AccSpeed = 10 DecSpeed = 10
TIMER T = 3
AXIS_STOP 1
CONSTANTAXIS_VELOCITY AxisNum = 1 RunType = 2 V = 1000 AccSpeed = 10 DecSpeed = 10
TIMER T = 3
AXIS_STOP 1
END轴恒转矩 (CONSTANTAXIS_TORQUE)
支持类型: 外部轴(O1、O2)、独立轴(S1、S2)
运动类型: PT
轮廓转矩模式(PT): 控制器将目标转矩、转矩斜坡值发送给驱动器,转矩调节由驱动器内部执行。
转矩: 转矩的值设定为该轴额定转矩的百分比,正负代表运动方向。
转矩斜坡: 转矩斜坡是转矩的加减速,单位是%0.1/s,转矩斜坡填写较小时,启动会比较慢。
阻塞特性: 该指令为不阻塞运动,运动过程中可以执行下一条指令,直到下个指令运行。
对应模式需要的PDO(以安驰为例):
- PT:6071

使用案例:
NOP
CONSTANTAXIS_TORQUE 2 1000 232
TIMER T = 3
AXIS_STOP 2
CONSTANTAXIS_TORQUE 2 -1000 232
TIMER T = 3
AXIS_STOP 2
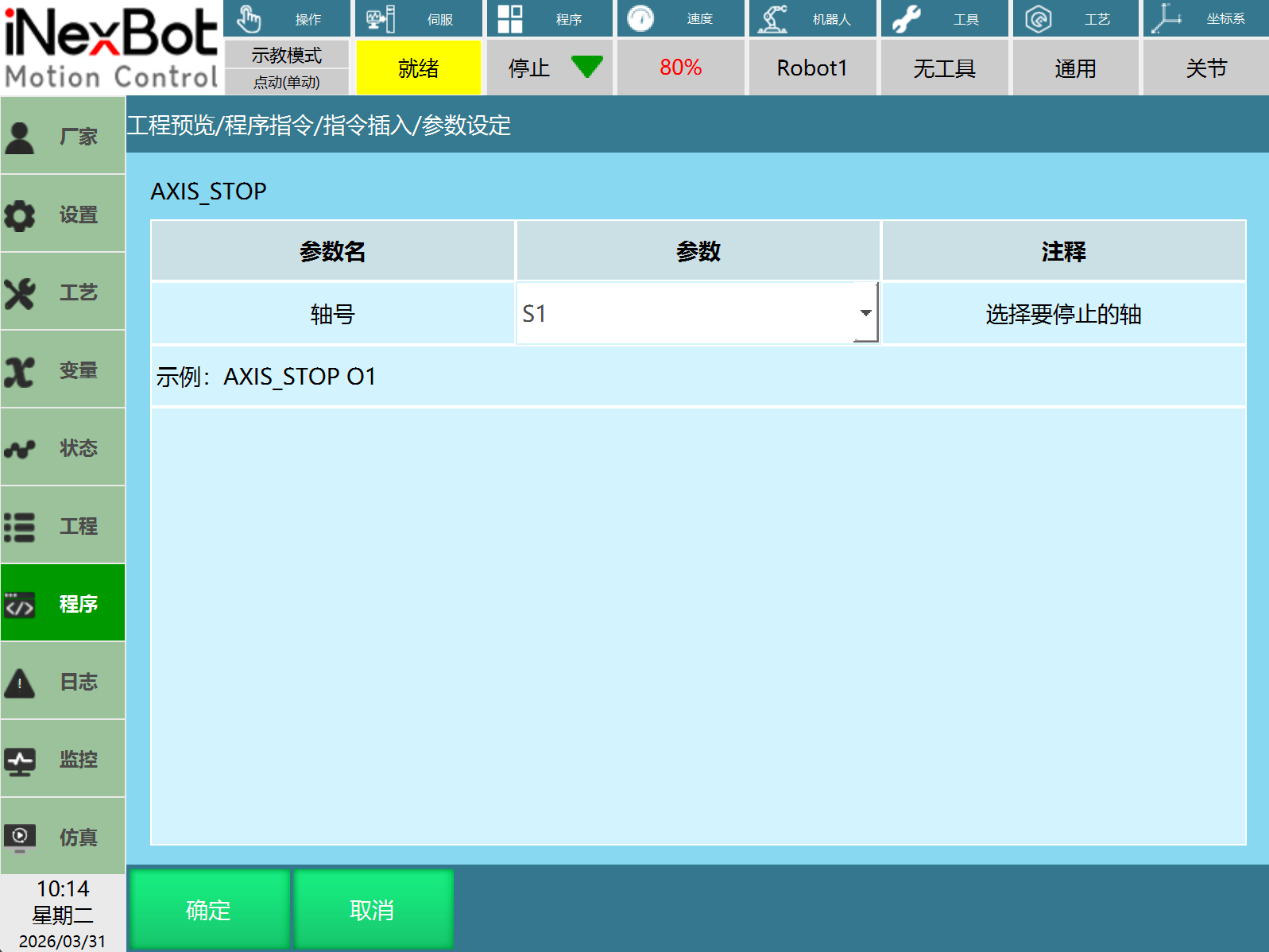
END轴停止 (AXIS_STOP)
支持类型: 外部轴(O1、O2)、独立轴(S1、S2)
轴号: 选择需要停止的对应轴号,可以停止运行中的轴号。
注意事项:
- 轴控制运动指令运行后需要添加轴停止指令,运行轴停止指令后再运行其他的轴控制指令。
可能存在的问题:
- 轴控制运动指令后没有添加轴停止指令,可能导致下一条轴控制指令运动方向、运动速度错误。
- 轴停止指令没有添加在轴控制运动指令后,可能导致运动的独立轴无法正常停止。
使用案例:
NOP
CONSTANTAXIS_TORQUE 2 1000 232
TIMER T = 3
AXIS_STOP 2
ENDNOP
AXIS_PTP AxisNum = 1 RunType = 1 PositionType = 1 PositionValue = 1000 V = 30 AccSpeed = [-] DecSpeed = [-]
AXIS_STOP 1
END取消独立控制 (CancelIndependentControl)
支持类型: 外部轴(O1、O2)
轴号: 选择需要取消的轴号,可以重新绑回已经解绑的轴,外部轴可以使用。
注意事项:
- 需要将解绑的轴重新绑定,运行取消独立控制指令即可。
- 轴在运行过程中,执行取消独立控制,无法将解绑的轴重新绑定,需要确保解绑轴的是否在运动。
可能存在的问题:
- 解绑后的外部轴,无法进行点动,需要重新绑定回来,才可以进行点动操作。
- 没有运行取消独立控制指令,将解绑的轴重新绑定,则无法修改关节参数、伺服映射。
- 取消独立控制指令可以将解绑的轴重新绑定回来,如果在取消独立控制指令下面还存在运动控制指令,会提示伺服状态不一致,作业文件启动失败的报错。作业文件运行时、运动控制基础指令会进行伺服状态检测,轴控制运动指令不检测伺服状态。

使用案例:
NOP
CONSTANTAXIS_VELOCITY AxisNum = 1 RunType = 3 V = -50 AccSpeed = 10 DecSpeed = 10
TIMER T = 3
AXIS_STOP 1
CANCEL_INDEPENDENT_CONTROL 1
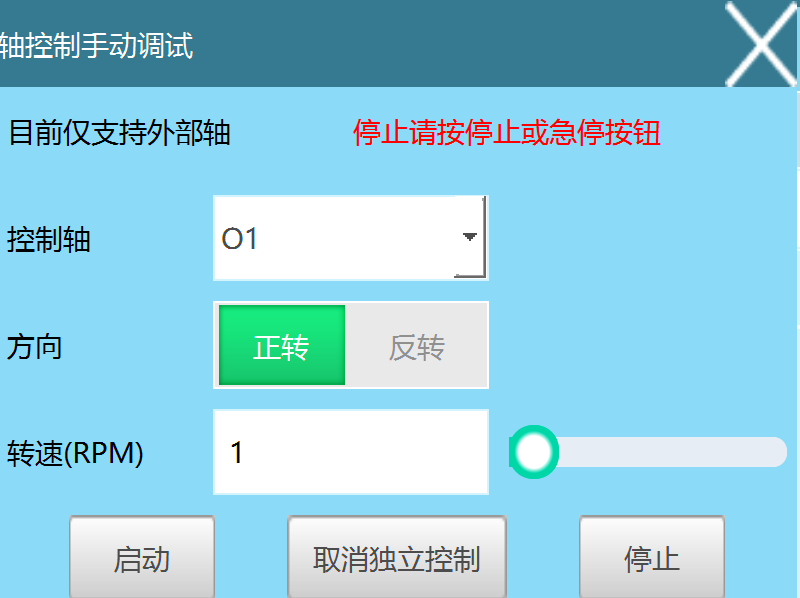
END轴独立控制窗口
打开设置——操作参数,打开显示轴控制界面,工艺弹窗中显示"轴独立控制"。
轴独立控制窗口支持模式:PV。
控制轴: 选择需要运动/停止的轴,目前支持外部轴。
方向: 运动时的方向。
转速: 设置运动时的转速。
启动: 点击启动,运行轴运动(轴恒转速pv)。
停止: 点击停止,停止正在运行的轴(轴停止)。
取消独立控制: 将选择的控制轴重新绑定回来(取消独立控制)。
AI 检索专用问答对 (Q&A for Retrieval)
Q:如何使用独立轴,使用前需要先准备什么操作?
A:需要几个轴,创建几个独立轴根据配置填写映射驱动的编码器位数、减速比、额定正转速等参数,确认驱动器是否支持想要使用的模式,根据驱动器手册配置pdo。
Q:配置pdo后使用使用、点动没有反应?
A: 确认配置的pdo是否正确,确认设置的减速比、编码器位数、额定转速等关键参数是否正常,确认是否是因为轴运动过慢显示不明显。
Q:使用轴恒转速运动速度过慢?
A:通过U盘导出配置,打开IndependentControlAxisConfig.json文件,修改pvAndPpModeMaxVel字段,具体数值根据编码器位数进行填写,最大支持$2^{32}$-1
Q:轴控制支持哪些类型的轴?
A:支持外部轴(O1、O2)和独立轴(S1、S2)。
Q:轴控制支持哪些运动模式?
A:支持PP(轮廓位置模式)、CSP(周期同步位置模式)、PV(轮廓速度模式)、CSV(周期同步速度模式)、PT(轮廓转矩模式)。
Q:PP模式和CSP模式的区别是什么?
A:PP模式是控制器将目标位置、速度、加减速度发送给驱动器,驱动器内部完成位置控制、速度控制、转矩控制;CSP模式是控制器完成位置规划,将规划好的目标位置周期性地发送给驱动器,驱动器内部完成位置控制、速度控制、转矩控制。
Q:轴点到点运动的位置类型有哪些?
A:有绝对位置和增量两种类型。绝对位置是运行到设置的位置处,增量是在当前位置以一定增量移动。
Q:轴恒转速指令的阻塞特性是什么?
A:轴恒转速指令为不阻塞运动,运动过程中可以执行下一条指令,直到轴停止指令运行
Q:解绑后的外部轴,无法进行点动,应该怎么办?
A:解绑后的外部轴,无法进行点动,需要重新绑定回来,才可以进行点动操作,运行取消独立控制指令
Q:没有运行取消独立控制指令,将解绑的轴重新绑定,会导致什么问题?
A:没有运行取消独立控制指令,将解绑的轴重新绑定,则无法修改关节参数、伺服映射。
Q:运动过程中突然跳点,是什么原因?
A:独立轴运动过程红编码器值处于最大值、最小值临界点,没有开启多圈值功能导致的跳点。