Appearance
计算目标形态指令
SOLVE_CONFIGURATION-计算目标形态值
功能
当从一个点A(机器人当前实际位置)运动到另外一个点B时,可以通过算法计算出机器人能以多少种形态从A到B
使用范例
参数说明:
目标点:即机器人要运动到的位置
形态值个数:算法计算得出多少种形态可以从A到达B(计算的是姿态总数)
形态值首个变量:存放计算出形态值D的首个变量(比如说算法计算出有3种形态可以从A到B,如指令说明所示,算法计算出第一个形态为2,则GI002存放2,GI003存放的就是3,GI004存放4)
计算目标形态值 G0001 GI001 GI002

程序说明
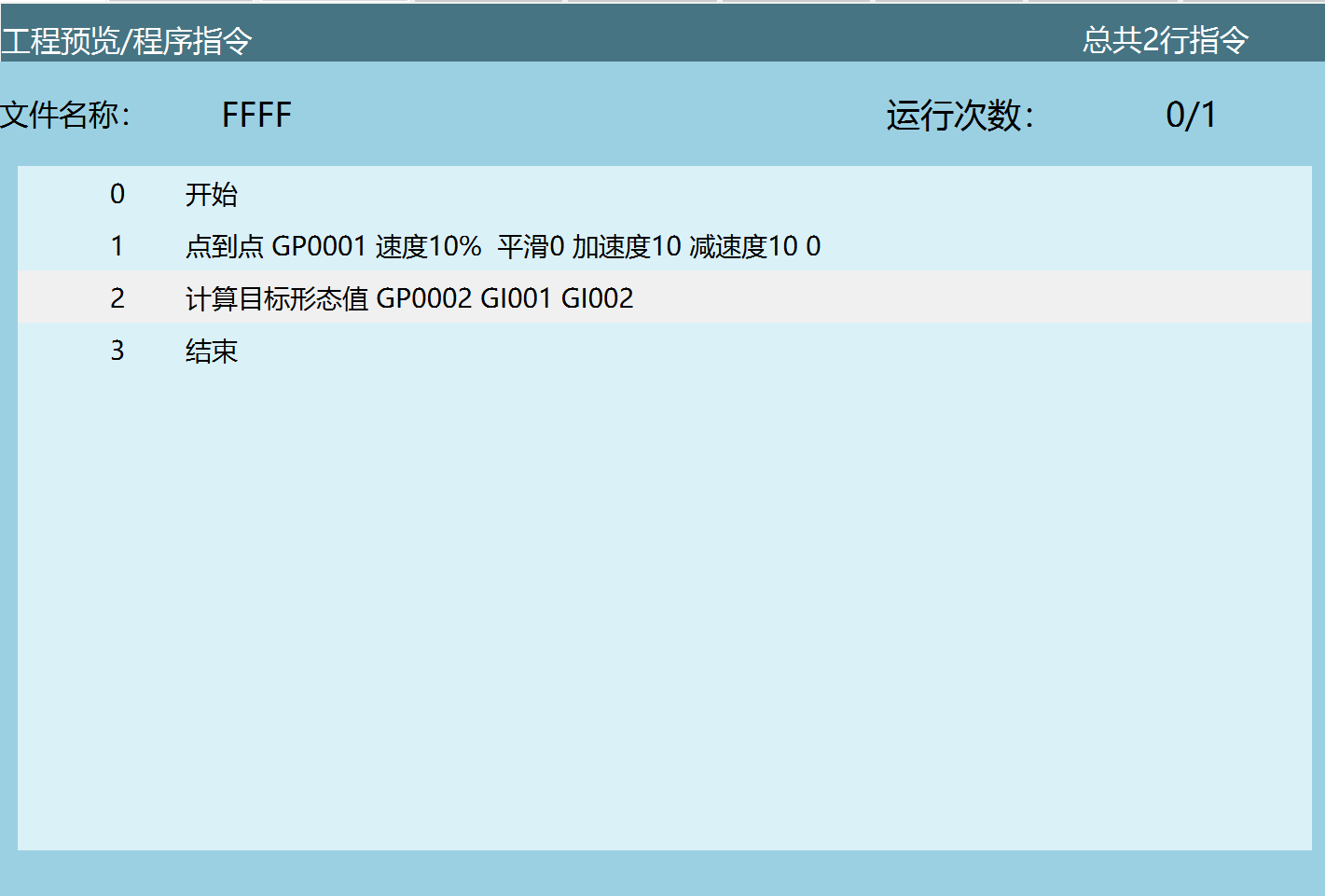

如上图所示,现在有两条指令,需要从GP0001使用计算形态值指令到GP0002。
通过计算,计算出有3种形态到GP002,将形态个数存入GI001
计算出有3种形态,将计算出的形态值首个变量存入GI002,GI002=2 GI003=3,GI004=4
**注意事项
计算出来的形态,无法直接在点位参数界面修改形态值使用,可以使用设置点位信息指令调用计算出来的形态值。
计算目标形态值参数说明:
*运动指令内形态值计算方式:
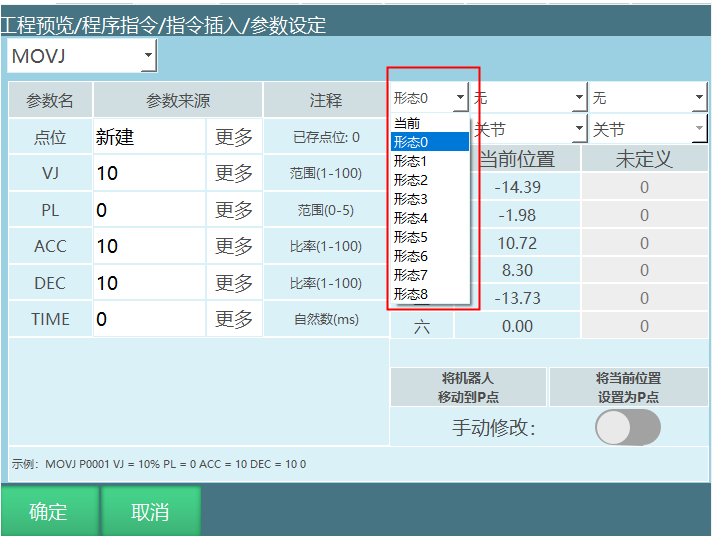
形态参数:
(如选择当前,则控制系统自动通过转换方式计算出应该选择哪个形态值)
形态值为机器人1轴、3轴、5轴位置的二进制转换值
转换方式:
例如某个六轴机器人1轴为59度、2轴为69度、3轴为79度、4轴为89度、5轴为99度、6轴为109度;
取其中的1/3/5轴,点位范围在-90~+90之间为1,不在为0;
所以结果如下
轴 1轴 3轴 5轴
二进制数值 1 1 0
二进制数110 = 十进制6
形态值为十进制结果再加1,该点位形态值为7
注意事项
如需使用计算出来的姿态,则需要使用设置点位指令调用计算出来的姿态进行使用
六轴串联形态值计算优化
1、形态值的计算规则进行过一次优化,对J1的二进制转换做了优化,整体没有大的改动;
2、形态值为肩部形态值(原来的一轴)、肘部形态值(原来三轴)、腕部形态值(原来五轴)的二进制转换值;
3、转换方式如下:
(1)肩部形态值
判断规则:四五六轴的轴线交点是否在J1轴线的前方,在前方,则肩部形态值取1,不在前方,肩部形态值取0;
如图示位置,肩部形态值取1
注意:肩部形态值和J1的度数没有关系了,会受到J2 J3 J4的综合影响,只看交点在前方还是后方。图示位置肩部形态值取1,即使J1转了180度,也还是在前方
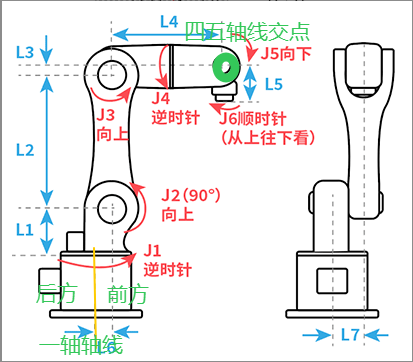
(2)肘部形态值
判断规则: -90 < 三轴J3的度数 < 90,肘部形态值取1,否则取0;
示意图中,J3为零点,故肘部形态值取1;
(3)腕部形态值
判断规则:以五轴部分和小臂共线时作为分界点,往下翻时,腕部形态值取1,否则取0;
通常以图示位置作为零点位置,则判断规则为 :-90 < 五轴J5的度数 < 90 ,腕部形态值取1,否则取0;示意图中的腕部形态值是1;
还有一种,五轴水平的零点位置,则判断规则为:0 < 五轴J5的度数< 180,腕部形态值取1,否则取0;
4、形态值的计算
三个形态值共同组成一个二进制数,111
形态值 = 4*肩部形态值 + 2*肘部形态值 + 腕部形态值 + 1
示意图位置的形态值则为:4*1+2*1+1+1 = 8;
AI 检索专用问答对 (Q&A for Retrieval)
Q: SOLVE_CONFIGURATION 指令的作用是什么?
A: 用于计算机器人从当前点A运动到目标点B时,可行的所有"形态(姿态)"。输出结果包括可达形态总数和每一种形态对应的形态值。
Q: 计算出来的形态值是如何存储的?
A: 通过连续寄存器变量存储,例如:GI001存储形态个数,GI002存储第一个形态值,GI003、GI004...依次存储后续形态值。本质是顺序写入一组连续变量。
Q: 计算出来的形态值可以直接使用吗?
A: 不可以直接在点位参数界面修改使用。正确方式是使用"设置点位信息"指令,将计算出的形态值写入点位后再使用。
Q: 形态值是如何计算出来的?
A: 基于机器人关键轴(通常为1轴、3轴、5轴或肩/肘/腕)生成二进制值,在指定角度范围内记为1,不在范围内记为0。然后将二进制转换为十进制,再加1得到最终形态值。
Q: 六轴串联形态值计算的优化内容是什么?
A: 1. 形态值的计算规则进行过优化,对J1的二进制转换做了优化,整体没有大的改动; 2. 形态值为肩部形态值(原来的一轴)、肘部形态值(原来三轴)、腕部形态值(原来五轴)的二进制转换值; 3. 肩部形态值判断规则:四五六轴的轴线交点是否在J1轴线的前方,在前方取1,不在前方取0; 4. 肘部形态值判断规则:-90 < 三轴J3的度数 < 90,取1,否则取0; 5. 腕部形态值判断规则:以五轴部分和小臂共线时作为分界点,往下翻时取1,否则取0; 6. 形态值计算:4肩部形态值 + 2肘部形态值 + 腕部形态值 + 1。