Appearance
多机协调类指令
环境: 多机模式下,机器人之间的同步。
task 指令(声明协调参数)
参数:
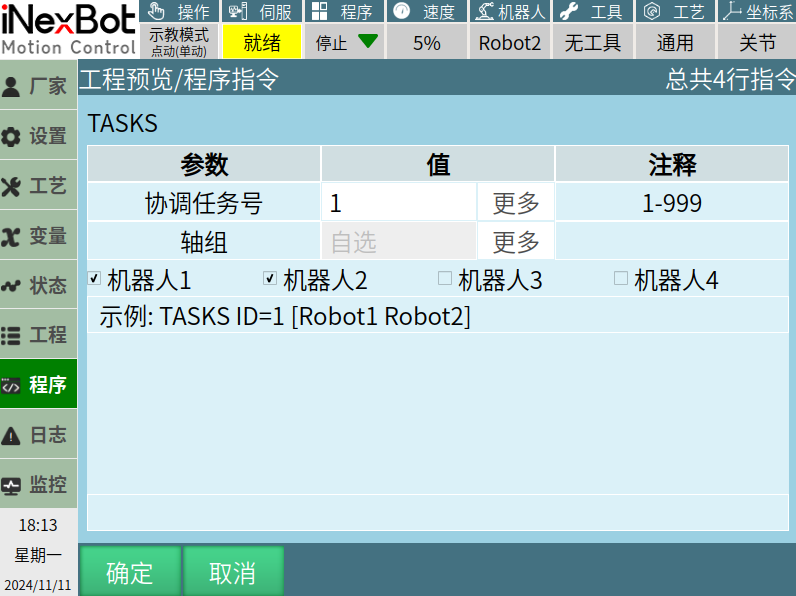
协调任务号: 范围1-999,可绑定整数型变量,也可选择手填。
轴组: 可选择自选或者绑定整数型变量。
自选:点击下方机器人1、2、3、4,前的小方框,选中对应的机器人。
绑定变量:选择机器人1,变量数值为1;选择机器人1、2,变量数值为3;选择机器人1、2、3,变量数值为7;选择机器人1、2、3、4,变量数值为15。(注:变量数值不对,运行指令则会报错。)
wait_sync_task指令(等待任务同步点)
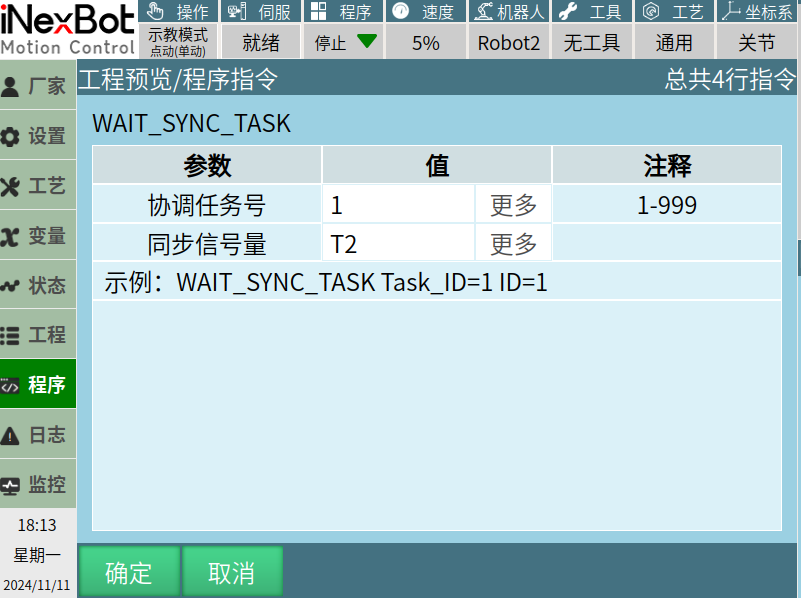
协调任务号: 范围1-999,可绑定整数型变量,也可选择手填。
同步信号量: 只能手填。范围:键盘所有字符。
示例:
- 机器人1、2指令参数一致
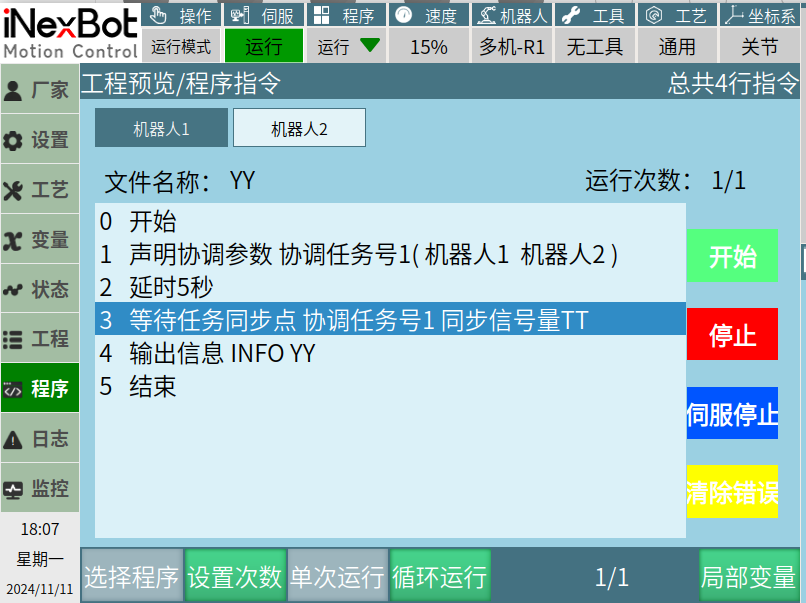
多机模式,运行机器人1、2图片内作业文件,当机器人1运行到等待任务同步点指令的时候,机器人2未运行到等待任务同步点,机器人1会停留在等待任务同步点指令位置,一直到机器人2也运行到等待任务同步点指令,机器人1、2,才会继续向下运行。否则将会一直停留在等待任务同步点指令。
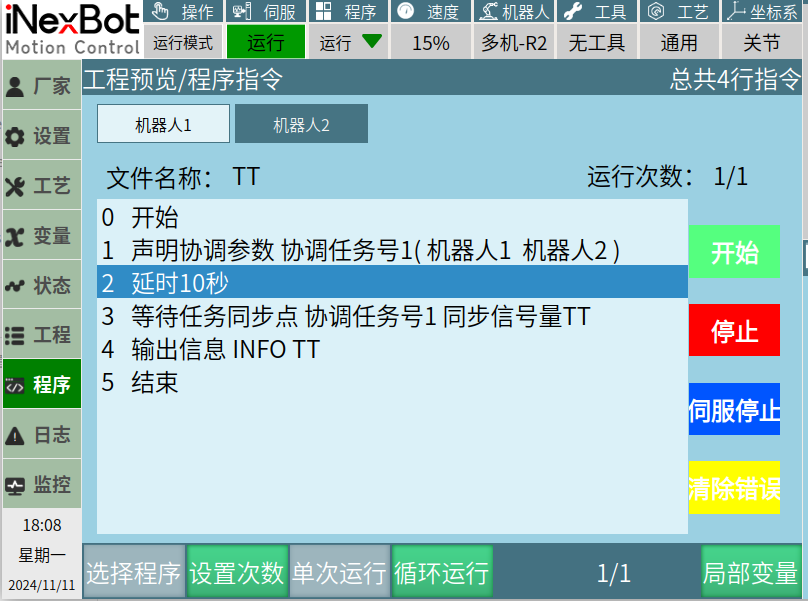
- 机器人1、2指令参数不一致
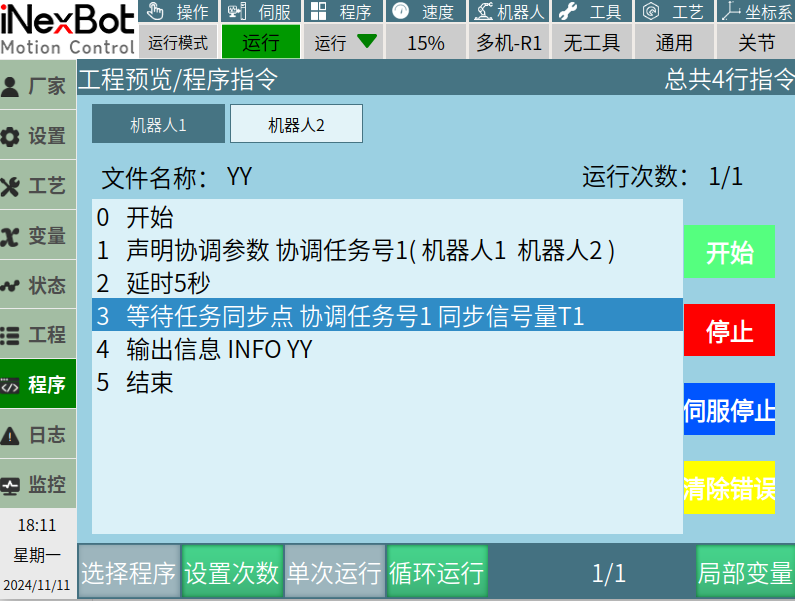
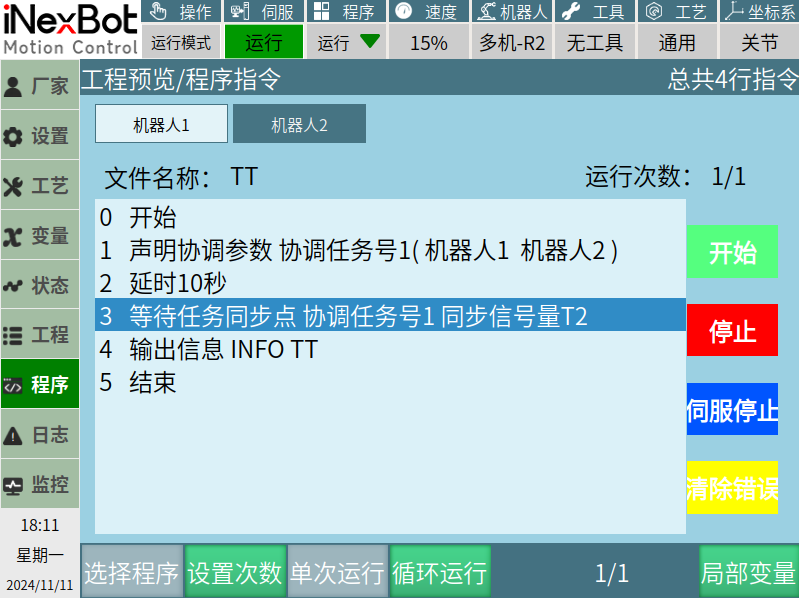
机器人1等待任务同步点指令内同步信号量为T1,机器人2等待任务同步点指令内同步信号量为T2,机器人1、2同时或者先后运行到等待任务同步点指令, 因为同步信号量不一致, 所以机器人1、2会一直停留在等待任务同步点指令,不再往下运行。
AI 检索专用问答对 (Q&A for Retrieval)
Q: task指令的作用是什么?
A: task指令用于声明协调参数,在多机模式下实现机器人之间的同步。
Q: wait_sync_task指令的作用是什么?
A: wait_sync_task指令用于等待任务同步点,在多机模式下实现机器人之间的同步等待。
Q: wait_sync_task指令中的同步信号量有什么要求?
A: 同步信号量只能手填,范围是键盘所有字符。
Q: 多机协调指令的使用环境是什么?
A: 多机协调指令需要在多机模式下使用,用于实现机器人之间的同步协调。
相关资源
版本历史
| 版本 | 日期 | 变更内容 | 作者 |
|---|---|---|---|
| 1.0.0 | 2026-04-13 | 初始版本 | MUZI165 |